考虑采用匹配模式法进行输送管道离散阻塞检测的方法
- 国知局
- 2024-07-31 22:57:37
本发明属于基于水锤波的管道故障定位数值模拟与仿真,包括引调水管道、市政供(排)水管网、石油天然气输送管道的阻塞定位技术,具体涉及考虑采用匹配模式法进行输送管道离散阻塞检测的方法。
背景技术:
1、引水调水工程和城市供水管网的迅速发展确保了居民用水的供应。然而,由于管道老化、维护不善以及长时间的使用,许多大型管网面临着阻塞、泄漏和腐蚀等问题。自然阻塞主要由于化学物质缓慢沉积、碳酸钙垢集聚或生物膜堆积等过程引起;而人为阻塞则是由于系统维护不当导致阀门部分关闭而产生。管道阻塞会导致严重的水头损失,进而增加水泵输送成本。阻塞问题随着时间的推移而逐渐加剧,因此及早识别和定位输水管道中的潜在阻塞至关重要。
2、不同于管道泄漏,离散阻塞并不会引起射流噪声或流体渗漏等显著现象,具有很强的隐蔽性。传统的离散阻塞定位方法包括钻孔法、敲击法、应力应变法以及cctv管道探测机器人等。前三种方法通常需要将深埋的管道挖掘出露天,并逐段检测管道阻塞情况。而在使用侵入式管道机器人进行离散阻塞定位时,需要将管道排空,完成检测后才能重新充水。
3、传统的管道离散阻塞定位方法普遍存在成本高、效率低、精度差、检测范围小等问题。所以要提供一种新的阻塞检测方法来解决上述问题。
技术实现思路
1、为了解决管道阻塞定位精度不高的技术问题,本发明提供一种采用匹配模式法进行输送管道离散阻塞检测的方法。
2、本发明提供的采用匹配模式法进行输送管道离散阻塞检测的方法,包括以下步骤:
3、step1:根据传递矩阵方法构建包含离散阻塞的管道瞬变流控制方程;
4、step2:计算无离散阻塞管道中传感器处的压力水头,并根据传感器处测量的压力数据,计算传感器处有无离散阻塞时的压力水头差,并将其作为测量数据;
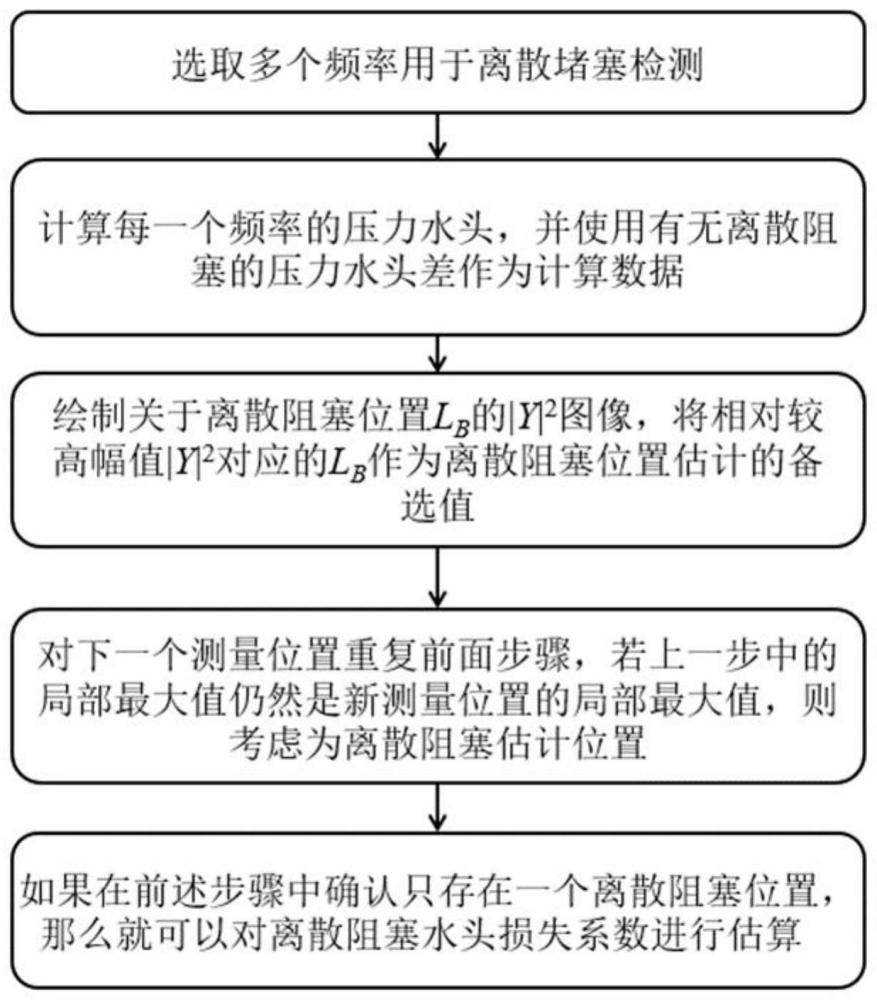
5、step3:根据测量数据结合匹配模式法对管道中潜在的离散阻塞进行定位。
6、进一步的,步骤step1中建立包含离散阻塞的管道瞬变流控制方程,测量点lm处的流量q和压力水头h可用矩阵表示
7、
8、
9、等式中:上标nb代表没有离散阻塞;b=μc2/(jωgs)为特征阻抗;c为波速;为传播函数;ω是角频率;j是虚数单位;g是重力加速度;s是管道横截面积;r是线性化阻力,r=(fq0)/(gds2);f是恒定摩阻系数;q0是管道中的稳态流量;d是内径;l是沿管轴长度,l∈[lu,lb)∪(lb,ld];结合等式(2),等式(1)中的矩阵可简化为
10、
11、
12、等式中:fsb是与离散阻塞位置lb相关的矩阵,与离散水头损失系数zb无关;结合等式(1)-(4),对于角频率ω,在lm处的水头为
13、h(ω,lm)=hnb(ω,lm)+zbe(ω,lb,lm) (5)
14、hnb(ω,lm)=-b sinh(μlm)q(lu)+cosh(μlm)h(lu) (6)
15、其中:
16、
17、进一步的,步骤step2中计算正常管道中传感器处的压力水头,同时根据传感器处测量的压力水头数据,计算管道有无离散阻塞时传感器处的压力水头差,并将其作为测量数据;用表示在频率ωj测量的水头响应;假设测量被噪声vj干扰,即
18、
19、则i个频率测量水头,记为上标t代表向量转置;定义有无离散阻塞造成的水头差δh=(δh1,…,δhi)t,其中g(lb)=(e(ω1,lb,lm),…,e(ωi,lb,lm))t,噪声向量v=(v1,…,vi)t;因此,传感器测量的水头差δh可表示为
20、δh=zbe(xb)+v (9)
21、进一步的,步骤step3中根据测量数据结合匹配模式法对管道中潜在的离散阻塞进行定位;假设噪声向量v服从高斯正态分布其中ij是j维单位矩阵;匹配模式法的内容是通过改变一个单位向量n=(n1,…,nj)t(|n|=1),使单位向量n在j维复向量空间中具有与测量信号相同的方向;定义输出函数y为权重向量n与水头差δh的内积
22、y≡<n,δh>=ntδh (10)
23、通过使等式(11)最大化的来获得最优权重n
24、|y|2=|ntδh|2=ntδhδhtn (11)
25、将等式(9)代入等式(11),然后通过最大化其数学期望(用表示),可以获得最优权重:
26、
27、等式中:表示使等式(12)取最大值的参数值n,最佳的n是一个平行于e的向量。将等式(12)代入等式(11)中可以估计离散阻塞位置
28、
29、如果测量误差符合高斯正态分布,那么等式(13)同时也可视为离散阻塞水头损失系数的最大似然估计;在这种情况下,离散阻塞的大小zb可以被估计为:
30、
31、在这项发明中,离散阻塞位置和大小是独立进行估计的;首先,通过使用等式(13),获得阻塞位置lb的估计值接着,将代入等式(14)中估计离散阻塞水头损失系数
32、进一步的,所述步骤step3中对于两个离散阻塞,其位置为水头损失系数为在传感器处测量的总压力水头可以表示
33、
34、等式中:
35、
36、等式中:ece表示两个离散阻塞的共同作用,且与其大小无关;将等式(15)右侧的hnb(ω)移至左侧可得等式(17)
37、
38、等式中:表示传感器处的水头差;δh1为第一个离散阻塞对δh的作用;δh2为第二个离散阻塞对δh的作用;δhce为两个离散阻塞共同对δh的作用;不同频率的δh1,δh2和δhce的比值相差较大,因此难以判断δhce对δh的影响程度;通过引入相关系数k来判断两个向量的相似程度。
39、
40、等式中:k为向量a=(a1,…,ai)t和向量b=(b1,…,bi)t的相关系数,和分别为a与b中元素的均值;定义a为δh1+δh2,b为δh;根据等式(17),离散阻塞的位置和水头损失系数会直接影响δh1+δh2与δhce的大小,进而影响a与b的相关系数k。
41、两个离散阻塞位置lb影响着相关系数k的变化,但规律不明确;离散水头损失系数zb对相关系数k的影响呈现出随着zb增加,k逐渐减小的规律;但是只要zb<10000(等价于球阀开度大于8%),k就始终大于0.85(极度相关),说明两个离散阻塞共同对δh的作用较小;可以忽略δhce对δh的影响,且不会对两个离散阻塞定位产生较大影响。因此,两离散阻塞的相互作用模型可以线性化处理,最终得到等式(19)
42、δh≈δh1+δh2 (19)
43、如等式(19)所示,即便存在两个离散阻塞,仍然可以采用基于单个离散阻塞假设的定位方法,输出函数y可以表示为
44、
45、本发明的水锤波管道故障检测方法,具有高效、精确、便捷等优势,展现了广泛的工程应用前景。其工作原理是:在管道可接触点(例如消防栓)主动激发振幅可控的水锤波,并在指定位置测量携带管道特性的水锤波信号,利用信号处理方法来识别和定位系统中的各种故障。
46、有益效果:
47、本发明的阻塞检测方法,
48、(1)采用匹配模式法在噪声环境中能精准定位管道系统中的单个阻塞。
49、(2)当两个邻近阻塞的间距大于最小检测半波长时,匹配模式法能够准确估计它们的位置。
50、(3)匹配模式法充分利用所有频段信息,可有效提高阻塞定位的准确性。
51、(4)与传统方法共振峰衰减法相比,匹配模式法抗噪声能力更强;获取同等定位结果时,其所需的信号带宽更窄。
本文地址:https://www.jishuxx.com/zhuanli/20240730/195489.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。