一种考虑纵坡影响的道路通行能力及瓶颈状态估算方法
- 国知局
- 2024-07-31 21:20:57
本发明涉及一种考虑纵坡影响的道路通行能力及瓶颈状态估算方法,属于智能交通。
背景技术:
1、在道路设计和交通规划中,纵坡是一个重要的因素,对交通流畅度和通行能力有着显著影响。纵坡路段上的交通瓶颈往往由于限速、车辆之间的速度差异以及自由流速度的变化等因素共同造成。因此,研究纵坡路段上的交通瓶颈现象,并探究如何缓解这种拥堵是提高道路通行效率的重要内容之一。
2、传统基于纵坡的通行能力模型往往忽略了道路环境下自由流速度的变化,仅考虑了纵坡对车辆速度的影响,导致通行能力计算精度不足,难以准确捕捉交通瓶颈的发生。事实上,在纵坡路段,车辆受到纵坡的影响会导致自由流速度的变化,进而影响整体交通流的运行情况。因此,为了更准确地评估纵坡路段的通行能力和预测交通瓶颈的发生,需要考虑到纵坡对自由流速度的影响,建立更为综合和精确的通行能力模型。
技术实现思路
1、本发明为克服现有技术的不足之处,提出一种考虑纵坡影响的道路通行能力及瓶颈状态估算方法,以期能综合考虑纵坡对自由流速度的影响,将纵坡因素融入通行能力计算中,更好地反映实际道路环境下的交通流动特性,通过精确评估纵坡路段的通行能力,可以有效指导交通规划和管理,优化道路设计,从而能缓解交通拥堵,并能提高道路通行效率,提升交通运输系统的整体运行水平。
2、为达到上述目的,本发明采用如下技术方案:
3、本发明一种考虑纵坡影响的道路通行能力及瓶颈状态估算方法的特点在于,是按如下步骤进行:
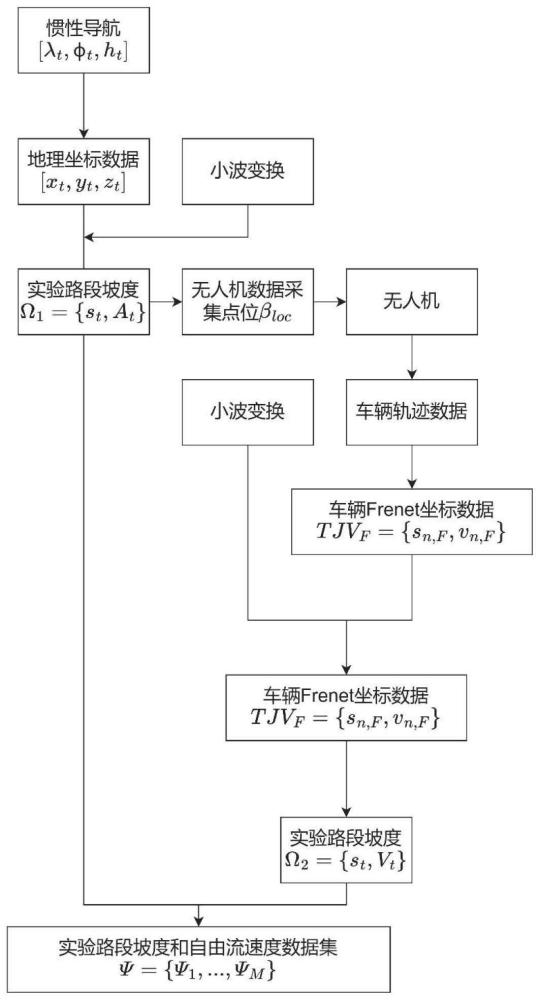
4、步骤1、采集t时刻实验车在目标道路的位置数据{st,αt};其中,st表示t时刻实验车的弧长,αt表示t时刻实验车的纵坡坡度;
5、步骤2、通过小波变换对{st,αt}进行边界检测,从而将检测到的所有边界点加入变坡点集合β,用于识别纵坡区域数据集ω1;
6、步骤3、收集目标道路受纵坡影响的自由流轨迹视频,并从中获取车辆的轨迹数据集φ;
7、步骤4、利用小波变换来检测φ中车辆的轨迹速度改变点,确定自由流速度变化的位置,从而构建速度区域数据集ω;
8、步骤5、建立考虑纵坡和自由流速度的道路通行能力模型,并基于ω计算目标道路中各路段通行能力uψ;
9、步骤6、判别和预测道路瓶颈状态,并得到目标道路中各路段在[0,t1]时段下所有瓶颈状态和更新流量。
10、本发明所述的一种考虑纵坡影响的道路通行能力及瓶颈状态估算方法的特点在于,所述步骤1包括:
11、步骤1.1、利用实验车上的惯性导航系统获取实验车驶过目标道路的行驶数据[λt,φt,φt],其中,λt为t时刻实验车的经度,φt为t时刻实验车的纬度,ht为t时刻实验车的高程,t为记录的当前时刻,t∈[0,t];t为时刻总数;
12、步骤1.2、通过式(1)得到t时刻实验车的地理坐标linet=[xt,yt,zt],其中,xt为t时刻实验车的地心坐标系东西向位置,yt为t时刻实验车的地心坐标系南北向位置,zt为t时刻实验车的地心坐标系海拔位置;
13、
14、式(1)中,是地球的卯酉圈曲率的半径,是地球的椭球体第一偏心率,a是地球的椭球体长轴长度,b是地球的椭球体短轴长度;
15、步骤1.3、利用式(2)计算t时刻实验车的位置数据{st,αt},t∈[0,t-1];
16、
17、式(2)中,st表示实验车的初始位置[x0,y0]至t时刻实验车的位置[xt,yt]的弧长,初始化s0=0,αt表示t时刻实验车的位置[xt,yt]至t+1时刻实验车的位置[xt+1,yt+1]的纵坡坡度。
18、所述步骤2是按如下步骤进行:
19、步骤2.1、通过式(3)计算{st,αt}的连续小波变换系数t(δ,ε);
20、
21、式(3)中,δ是尺度因子,ε是平移因子,ε∈[0,st-1];st-1表示实验车的初始位置[x0,y0]至t-1时刻实验车的位置[xt-1,yt-1]的弧长;
22、步骤2.2、使用式(4)计算纵坡曲线的小波能量分布eε;
23、
24、式(4)中,δmin是尺度因子的最小取值,δmax是尺度因子的最大取值;
25、步骤2.3、令时,求得到变坡点集合β={ε1,ε2,…,εi,…,εr},其中,εi表示第i个变坡点位置,r是变坡点个数;
26、步骤2.4、将β中的相邻变坡点进行直线连接,从而构成纵坡线lα={l1,l2,…,li,…,lr-1},其中,li表示第i个纵坡区域[εi,εi+1]的纵坡线;将第i个纵坡区域[εi,εi+1]的坡度记为ai;εi+1表示第i+1个变坡点位置;
27、步骤2.5、当满足st∈[εi,εi+1]时,表示st在第i个纵坡区域[εi,εi+1]内,将第i个速度区域[εi,εi+1]的坡度ai赋值给αt,从而得到更新后的位置数据{st,αt};进而得到更新后的位置数据集ω1={st,αt|t∈[0,t-1]}。
28、所述步骤3是按如下步骤进行:
29、步骤3.1、将变坡点集合β映射至目标道路,从而转变为变坡点经纬度βloc=[λloc,φloc],λloc为变坡点的经度合集,φloc为变坡点的纬度合集;
30、步骤3.2、根据变坡点的经纬度βloc的间距及高空摄像覆盖范围,确定高空摄像设备的采集点位合集β',使得高空摄像设备的视角是以变坡点为中心,并覆盖目标道路;
31、步骤3.3、将高空摄像设备定位到采集点位合集β',并拍摄目标道路在β'上游、下游的自由流轨迹视频;
32、步骤3.4、采用车辆前景算法将上游、下游的自由流轨迹视频中的车辆与道路进行分离,从而获取车辆的轨迹数据集φ。
33、所述步骤4是按如下步骤进行:
34、步骤4.1、从车辆的轨迹数据集φ中分离出车辆轨迹集tj={tjn|n∈[0,n]},其中,tjn为第n辆车的轨迹数据,n是轨迹的数量;
35、步骤4.2、将[xt,yt,zt]设为frenet坐标系的法线;
36、步骤4.3、将tj转化为frenet坐标系下的轨迹位置数据tjf={tjn,f|n∈[0,n]},其中,tjn,f为第n辆车的轨迹在frenet坐标系下的位置数据,且tjn,f=[sn,f,ρn,f],其中,sn,f为第n辆车轨迹的弧长数据集,ρn,f为第n辆车轨迹的偏移数据集;
37、步骤4.4、计算tjf的法线速度,从而构成frenet坐标系下的位置和速度数据集tjvf={sn,f,vn,f},其中,vn,f为第n辆车轨迹的法线速度数据集;
38、步骤4.5、通过式(3)和式(4)计算tjn,f的小波变换能量en,ω,从而利用式(5)得到平均变换能量eω;
39、
40、式(5)中,ω是平移因子;
41、步骤4.6、令时,求得到自由流宏观速度变速点γ={ω1,ω2,…,ωj,…,ωq},其中,ωj表示第j个速度波动点的弧长坐标,q是自由流的速度波动点个数;
42、步骤4.7、定义[ωj,ωj+1]为第j个速度区域;将[ωj,ωj+1]内所有轨迹的平均速度作为第j个速度区域[ωj,ωj+1]的自由流速度vj;
43、步骤4.8、当满足st∈[ωj,ωj+1]时,表示st在第j个速度区域[ωj,ωj+1]内,并将第j个速度区域[ωj,ωj+1]的自由流速度vj赋值给st的自由流速度vt,从而获得实验路段的自由流速度数据集ω2={st,vt|t∈[0,t-1]};
44、步骤4.9、合并ω1和ω2为受道路影响的纵坡及自由流速度数据集ω={st,αt,vt|t∈[0,t-1]};
45、步骤4.10、对ω={st,αt,vt|t∈[0,t-1]}重新分区:
46、当αt=αt+1且vt=vt+1时,表示st和st+1在相同纵坡坡度和自由流速度的路段,并将st和st+1所在的路段合并,从而得到合并后的路段数据集ψ={ψ1,ψ2,…,ψm…,ψm},m为合并后的路段总数;ψm表示第m个合并后的路段,且ψm=[sm,sm+1,vm,αm],sm为第m个合并后的路段的起点弧长坐标,sm+1为第m个合并后的路段的终点弧长坐标,vm为第m个合并后的路段的自由流速度,αm为第m个合并后的路段的纵坡坡度。
47、所述步骤5是按如下步骤进行:
48、通过式(6)计算第m个合并后的路段ψm的通行能力um,从而目标道路中各路段的通行能力uψ={u1,u2,…,um…,um};
49、um=vm*km (6)
50、式(6)中,km为ψm在自由流状态下的交通密度,并由式(7)得到;
51、
52、式(7)中,hwm为ψm的最佳平均车头间距,并由式(8)得到;
53、
54、式(8)中,trec为驾驶员的反应时间,msd为车辆的最小安全间距;am为ψm受到纵坡影响的车辆制动减速度,并通过式(9)计算;
55、am=a0+g*sin[acrtan(αm)] (9)
56、式(9)中,a0为纵坡坡度为0时,车辆制动减速度;g表示重力加速度。
57、所述步骤6是按如下步骤进行:
58、步骤6.1、采集目标道路中各路段在当前时刻time的流量cψ={c1,c2,…,cm…,cm};其中,cm表示第m个合并后的路段ψm的流量;
59、定义目标道路中各路段的瓶颈状态b={b1,b2,…,bm…,bm},其中,bm表示第m个合并后的路段ψk的瓶颈状态;初始化bm=0;
60、步骤6.2、time=0,设置最大更新时长为t1;
61、步骤6.3、利用路侧设备获得在[time,time+δt]时段内合并后的路段数据集ψ的进口流量c0,δt为流量统计的间隔;
62、步骤6.4、判断cψ<uψ是否成立,若成立,则表示目标道路无交通瓶颈,并转入步骤6.5;否则,表示目标道路存在交通瓶颈,并转入步骤6.6;
63、步骤6.5、根据式(10)得到第m个合并后的路段ψm在时刻time+δt的更新流量c'm;从而得到目标道路在时刻time+δt的更新流量c'ψ={c'1,c'2,…,c'm…,c'm},令bm=0后,转入步骤6.11;
64、c′m=cm*δt-cm-1*δt m∈[1,m] (10)
65、步骤6.6、初始化变量k=m;
66、步骤6.7、判断第k个合并后的路段ψk的流量ck<uk是否成立,若成立,表示第k个合并后的路段ψk未发生交通瓶颈,并更新第k个合并后的路段ψk的瓶颈状态bk=0,转入步骤6.8;否则,表示ψk发生交通瓶颈,并更新bk=1,转入步骤6.10;其中,uk表示第k个合并后的路段ψk的通行能力;
67、步骤6.8、判断第k-1个合并后的路段ψk-1的流量ck-1<uk-1是否成立,若成立,表示第k-1个合并后的路段ψk-1未发生交通瓶颈,并采用式(11)得到第k个合并后的路段ψk在时刻time+δt的更新流量c'k,转入步骤6.10;否则,表示第k-1个合并后的路段ψk-1发生交通瓶颈,并采用式(12)得到更新流量c'k,转入步骤6.10,其中,uk-1表示第k-1个合并后的路段ψk-1的通行能力;
68、c′k=(ck-ck-1)*δt (11)
69、c′k=(ck-uk-1)*δt (12)
70、步骤6.9、判断ck-1<uk-1是否成立,若成立,路段ψk-1未发生交通瓶颈,采用式(13)得到更新流量c'k,转入步骤6.10;否则,表示编号路段ψk和路段ψk-1均发生交通瓶颈,采用式(14)得到更新流量c'k,转入步骤6.10;
71、c′k=(uk-ck-1)*δt (13)
72、c′k=(uk-min(uk-1,uk))*δt (14)
73、步骤6.10、判断k=1是否成立,若成立,表示得到time时刻更新后的瓶颈状态b和[time,time+δt]时段下合并后的路段数据集ψ的更新流量c'ψ={c'1,c'2,…,c'm}并输出,转入步骤6.11;否则,将k-1赋值给k,转入步骤6.7并顺序执行;
74、步骤6.11、判断time+δt<t1,若成立,将time+δt赋值给time,c'ψ赋值给cψ,转入步骤6.3顺序执行;否则,表示得到[0,t1]时段下所有瓶颈状态和更新流量。
75、本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述考虑纵坡影响的道路通行能力及瓶颈状态估算方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
76、本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序的特点在于,所述计算机程序被处理器运行时执行所述一种考虑纵坡影响的道路通行能力及瓶颈状态估算方法。
77、与现有技术相比,本发明的有益效果在于:
78、1、本发明通过运用小波变换对惯性导航组合获取的纵坡数据和视频拍摄得到的轨迹数据进行处理,实现了对目标道路纵坡和自由流速度的精确计算。通过这种方法,能够更准确地捕捉道路的实际状况,为后续的通行能力评估提供可靠的数据基础。同时,基于纵坡和自由流速度的分区处理方式,能够确保通行能力计算的精准性,为道路交通管理提供更为有效的参考依据。
79、2、本发明综合考虑了分区内纵坡和自由流速度对制动减速度和车头间距的影响,构建了相应的分区通行能力模型。通过这一模型,可以更全面地评估道路各分区的通行能力,并根据道路流入情况和当前状态,判断和预测道路交通瓶颈的出现。与此同时,本发明所需的数据量相对较低,提高了实际应用的便利性和效率,为交通管理部门提供了更为实用和可操作的工具。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189365.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表