风险推定系统和车辆控制系统的制作方法
- 国知局
- 2024-07-31 21:20:56
本公开涉及推定车辆的前方的风险度的技术。此外,本公开涉及基于风险度对车辆进行控制的技术。
背景技术:
1、日本特开2021-089698公开了推定来自盲区的突然冲出风险的技术。盲区由车辆前方的遮挡物形成。表示盲区的大小的“盲区大小角度”越大,突然冲出风险被计算得越大。
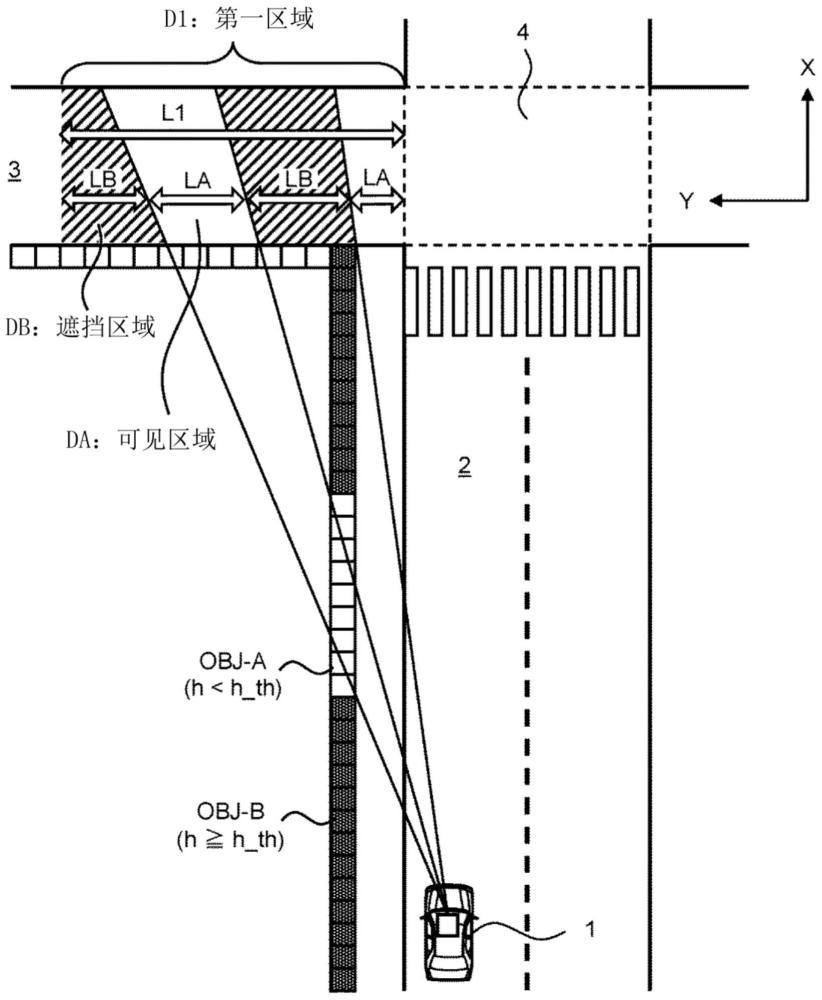
2、对与车辆正在行驶的道路交叉的交叉道路进行考虑。对于车辆而言,从交叉道路进入交叉路口的物体可能会成为风险。特别是,在从车辆观察时在交叉道路的跟前存在遮挡物的情况下,交叉道路的能见度(visibility)变差,恐怕会难以看到存在于交叉道路的物体。不过,实际环境中存在的遮挡物的结构是各种各样的。既有连续地存在的遮挡物,也有间歇地存在的遮挡物。既有高的遮挡物,也有低的遮挡物。由此,不见得仅因为存在遮挡物,就一定会看不到存在于交叉道路的物体。
3、在上述日本特开2021-089698中,基于盲区大小角度来推定风险。然而,仅就盲区大小角度而言,没有充分地考虑到遮挡物的结构,也没有考虑到交叉道路的能见度。就是说,就盲区大小角度而言,无法定量地评价交叉道路的能见度的好坏。基于这样的盲区大小角度的风险推定的精度不一定高。
技术实现思路
1、本公开的一个目的在于提供能高精度地推定车辆的前方的风险度的技术。
2、第一观点涉及推定车辆的前方的风险度的风险推定系统。
3、风险推定系统具备:一个或多个处理器;以及一个或多个存储装置,储存表示车辆的前方的立体物的三维配置的立体物配置信息。
4、交叉道路是在车辆的前方的交叉路口处与车辆行驶中的行驶道路交叉的道路。
5、一个或多个处理器设定从交叉路口向交叉道路之中延伸第一长度的第一区域。一个或多个处理器基于立体物配置信息,计算表示在从车辆的位置观察时第一区域被立体物遮挡的程度的遮挡度。然后,一个或多个处理器以随着遮挡度变高而风险度变得更高的方式计算风险度。
6、第二观点涉及对车辆进行控制的车辆控制系统。
7、车辆控制系统包括上述的风险推定系统。
8、一个或多个处理器基于风险度,执行进行车辆的转向和减速中的至少一方以回避车辆的前方的风险的风险回避控制。
9、根据本公开,在推定车辆的前方的风险度时,考虑车辆的前方的立体物的三维配置。更详细而言,基于立体物的三维配置来计算表示交叉道路内的第一区域被立体物遮挡的程度的遮挡度。然后,以随着遮挡度变高而风险度变得更高的方式计算风险度。通过考虑立体物的三维配置,能更高精度地推定车辆的前方的风险度。
技术特征:1.一种风险推定系统,推定车辆的前方的风险度,所述风险推定系统具备:
2.根据权利要求1所述的风险推定系统,其中,
3.根据权利要求1所述的风险推定系统,其中,
4.根据权利要求1所述的风险推定系统,其中,
5.一种车辆控制系统,对车辆进行控制,其中,
技术总结本公开涉及风险推定系统和车辆控制系统。风险推定系统推定车辆的前方的风险度。立体物配置信息表示车辆的前方的立体物的三维配置。交叉道路是在车辆的前方的交叉路口处与车辆行驶中的行驶道路交叉的道路。风险推定系统设定从交叉路口向交叉道路之中延伸第一长度的第一区域。风险推定系统基于立体物配置信息,计算表示在从车辆的位置观察时第一区域被立体物遮挡的程度的遮挡度。然后,风险推定系统以随着遮挡度变高而风险度变得更高的方式计算风险度。技术研发人员:菅谷文男受保护的技术使用者:丰田自动车株式会社技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240731/189363.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
信息处理装置的制作方法
下一篇
返回列表