通过车车通信中继预警前向交通盲区风险的方法
- 国知局
- 2024-07-31 21:17:40
本发明涉及汽车,更具体地说,涉及一种通过车车通信中继预警前向交通盲区风险的方法。
背景技术:
1、现有的安全辅助驾驶系统,如前向碰撞预警系统,装车之后,能够提前识别可能的交通风险或者让驾驶员注意到车头时距过近的前向车辆。然而,现有系统仅依赖自车的传感器,没有考虑前车所处的环境。只有前车做出制动等行为,并造成行车风险时,系统才会报警。此预警给驾驶员的反应时间极短,在极端情形下不能避免碰撞。如果前车能将前方关键的信息实时广播,主车及时接受这些信息并加以利用,则能提前预测由前车遮挡形成盲区内的交通目标运动轨迹,实时预警可能发生的风险和冲突。当前,车路协同系统技术能够实现车辆间的信息实时交互作用,也提供了bsm标准,主车的安全辅助驾驶系统在此作用下能够识别前车可能的驾驶行为,并提前预警。但是安全辅助驾驶信息尚未纳入。
2、现有安全辅助驾驶系统仅依赖自车的传感器,没有考虑前车所处的环境。只有前车做出制动等行为,并造成行车风险时,系统才会报警。此预警给驾驶员的反应时间极短,在极端情形下不能避免碰撞。安全辅助驾驶信息尚未纳入。
技术实现思路
1、本发明要解决的技术问题在于,提供一种通过车车通信中继预警前向交通盲区风险的方法,其能够让主车实时采集前车和前向交通盲区目标的运动状态信息,并预测前向交通盲区目标的运动轨迹,对可能发生的交通风险和冲突及时预警。
2、本发明解决其技术问题所采用的技术方案是:构造一种通过车车通信中继预警前向交通盲区风险的方法,包括以下步骤:
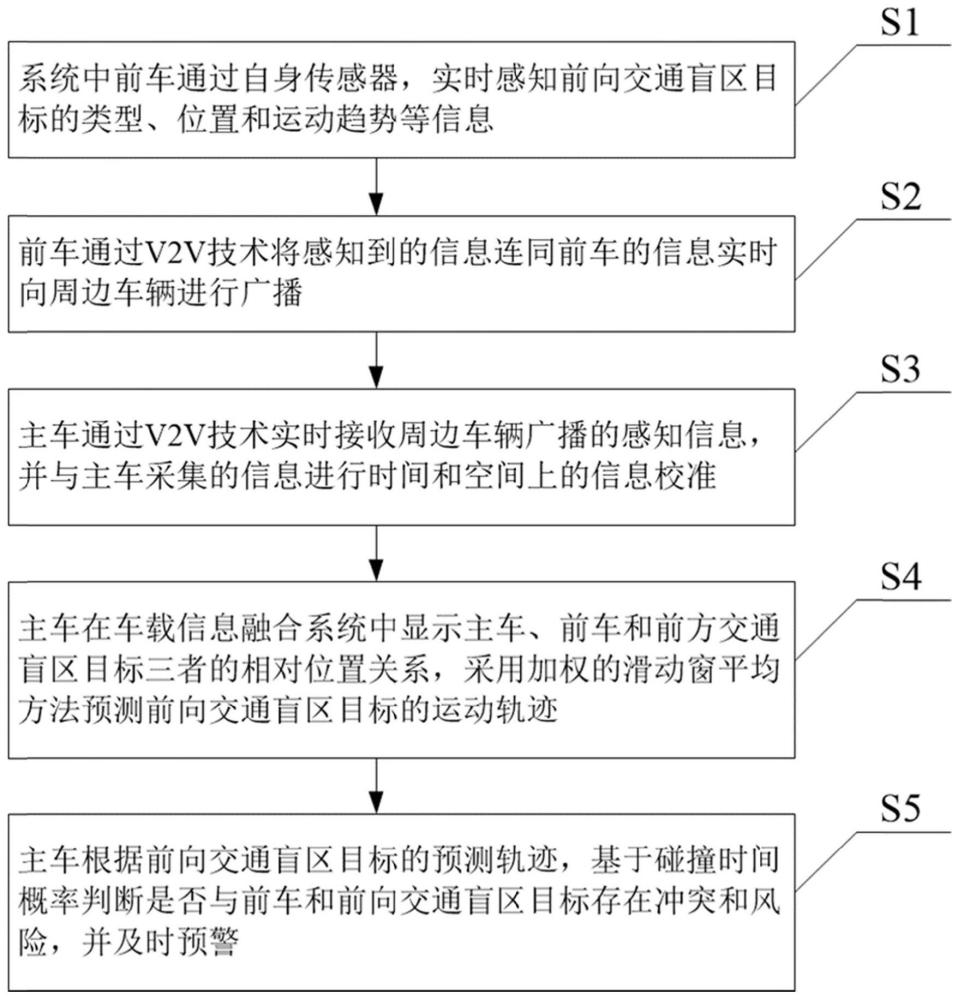
3、s1、系统中前车通过自身传感器,实时感知前向交通盲区目标的类型、位置和运动趋势的信息;
4、s2、前车通过v2v方法将感知到的信息连同前车的信息实时向后方主车进行广播;
5、s3、主车通过v2v方法实时接收前车广播的感知信息,并与主车采集的信息进行时间和空间上的信息校准;
6、s4、主车在车载信息融合系统中显示主车、前车和前方交通盲区目标三者的相对位置关系,采用加权的滑动窗平均方法预测前向交通盲区目标的运动轨迹;
7、s5、主车根据前向交通盲区目标的预测轨迹,基于碰撞时间概率判断是否与前车和前向交通盲区目标存在冲突和风险,并及时预警。
8、按上述方案,所述步骤s1中,所述前车自身传感器包含车载微波雷达、激光雷达和图像感知设备,所述前车自身传感器用于获取前向或周边交通目标相对于自车的相对位置关系;
9、所述前向交通盲区目标为因前车遮挡,主车失去前车前方视野而形成的交通盲区,在该交通盲区内存在的车辆或行人等交通目标。
10、按上述方案,所述步骤s2中,前车需广播的信息包括前车的车速vq和航向角θq,前向交通盲区目标的类型、运行速度vot和运行方向dot,前向交通盲区目标与前车的横、纵向距离xoq和yoq。
11、按上述方案,所述步骤s3中,主车采集的信息包括主车的车速vz和航向角θz,前车与主车的横、纵向距离xqz和yqz。
12、按上述方案,所述时间信息校准方法如下:
13、由于前向交通盲区目标的运动速度和方向随时间变化,经前车检测时间t1和主车接收时间t2,利用时间插值校准方法计算所需时刻前向交通盲区目标的运动趋势;
14、时间插值校准方法认为,在一段非常短的时间内,将前向交通盲区目标视为匀速直线运动状态进行处理,计算得到的所需时刻t的前向交通盲区目标的运动速度和方向为:
15、
16、其中,t1<t<t2,t1和t2时刻前向交通盲区目标的运动趋势为(vo1,do1),(vo2,do2)。
17、按上述方案,所述空间信息校准方法如下:
18、以平行和垂直于道路中央分割线的两个方向设为主平面坐标系的横、纵坐标轴,由于前车和主车都有各自的航向角,坐标信息采用直接线性变换校准到统一的主平面坐标系中;
19、以前车传感器为坐标原点,前向交通盲区目标在主平面坐标系中的坐标为:
20、
21、同理,以主车传感器为坐标原点,前向交通盲区目标在主平面坐标系的坐标为:
22、
23、其中,
24、按上述方案,所述步骤s4中,主车在车载信息融合系统中显示与前车、前向交通盲区目标的相对位置关系,即分别用坐标表示前向交通盲区目标与主车、前向交通盲区目标与前车、前车与主车在主平面坐标系下的横、纵向距离,其中,
25、按上述方案,所述步骤s4中,主车中继系统预测前向交通盲区目标的运动轨迹过程如下:
26、由于主车和前车每隔一段时间采集并通过v2v传递或接收信息,而坐标是关于时间的函数,采用加权的滑动窗平均方法来预测下一时刻的坐标,公式为:
27、
28、其中,分别为下一时刻前向交通盲区目标与主车、前向交通盲区目标与前车、前车与主车的横向距离预测值;
29、分别为下一时刻前向交通盲区目标与主车、前向交通盲区目标与前车、前车与主车的纵向距离预测值;
30、滑动窗容量为n,即采用固定n个历史时刻的实际值参与预测;
31、ωj为随时间变化的权重值,历史时刻与预测时刻越接近,对应的权重值越大,运用改进的softmax函数来表示权重值,即
32、分别为各历史时刻前向交通盲区目标与主车、前向交通盲区目标与前车、前车与主车的横向距离的实际值;
33、分别为各历史时刻前向交通盲区目标与主车、前向交通盲区目标与前车、前车与主车的纵向距离的实际值;
34、为修正参数,具体公式为:
35、
36、根据公式(4)即可得到下一时刻前向交通盲区目标的预测坐标,采用欧式距离公式计算前车与主车、前车与前向交通盲区目标下一时刻的预测距离和
37、其中,
38、按上述方案,所述步骤s5中,基于碰撞时间概率判断是否存在风险与冲突并及时预警的过程如下:
39、主车根据下一时刻的预测距离和实时计算下一时刻主车与前车、前车与前向交通目标的预测碰撞时间和同时设定碰撞时间阈值ttcmin;
40、其中,碰撞时间阈值设为驾驶员反应时间的1.5倍;若预测碰撞时间≤碰撞时间阈值,中继系统则会判断下一时刻存在风险和冲突,并发出预警信号;
41、记事件s为主车中继系统发出预警信号,事件a为主车与前车发生碰撞,事件b为前车与前向交通盲区目标发生碰撞,运用全概率的思想求得主车中继预警的概率为:
42、p(s)=p(s|a)·p(a)+p(s|b)·p(b)+p(s|a∩b)·p(a∩b) (5)
43、其中假设可能发生碰撞事故时中继系统必会发出预警信号,即p(s|a)=p(s|b)=p(s|a∩b)=1;p(a),p(b),p(a∩b)服从0-1分布,即满足相应的条件,其概率值为1,否则为0。
44、实施本发明的通过车车通信中继预警前向交通盲区风险的方法,具有以下有益效果:
45、本发明能感知因前向车辆遮挡形成视野盲区内的交通目标,并预测其运动趋势,判断是否与主车产生冲突和风险;系统中前车通过自身传感器,实时感知前向交通盲区目标的类型、位置和运动趋势等信息;前车通过v2v方法将感知到的信息连同前车的信息实时向周边车辆进行广播;主车通过v2v技方法实时接收周边车辆广播的感知信息,并与主车采集的信息进行时间和空间上的信息校准;主车在车载信息融合系统中显示主车、前车和前方交通盲区目标三者的相对位置关系,采用加权的滑动窗平均方法预测前向交通盲区目标的运动轨迹;主车根据前向交通盲区目标的预测轨迹,基于碰撞时间概率判断是否与前车和前向交通盲区目标存在冲突和风险,并及时预警;可使主车提前预警可能的交通风险,尤其是因前车遮挡形成视野盲区而产生的冲突和风险,增强安全辅助驾驶效果。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189148.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。