一种基于全路网轨迹数据的重型货车驾驶人驾驶风险识别方法
- 国知局
- 2024-07-31 21:14:17
本发明涉及驾驶风格识别分析领域,具体涉及一种基于全路网轨迹数据的重型驾驶人驾驶风险识别方法。
背景技术:
1、重型货车驾驶人驾驶风险是重型货车驾驶人行车过程中面临的,由自身因素或外界因素所带来的风险。受货源不确定性以及运输里程偏长等因素的影响,重型货车驾驶人发生超速、疲劳等不良驾驶行为的频次越高,诱发交通事故的可能性越大。与小汽车驾驶人相比,重型货车驾驶人普遍存在行车速度快、驾驶时间长等特点,更容易表现出不良驾驶行为,进而形成激进的驾驶风格。通过研究重型货车驾驶人的驾驶风格及其风险性,对加强交通监测和干预,降低重型货车交通事故发生率,提升道路行车安全具有重要的现实意义。
2、目前,货车驾驶人驾驶风险研究数据主要来源于问卷调查、实车驾驶实验、驾驶模拟实验、企业监测等,以高频轨迹数据为主。然而,根据相关规定,我国重型货车已全部安装卫星定位装置,获取的低频轨迹数据已接入道路货运车辆公共管理平台。因此,如何基于低频轨迹数据开展广域尺度的重型货车驾驶人驾驶风险研究仍然有待深入探索。
3、目前,基于轨迹数据的货车驾驶人驾驶风险研究大多仅基于某一类道路上的轨迹点开展,鲜有考虑多道路等级路网结构的驾驶风险研究。驾驶风格作为驾驶风险的一种外在表征形式,反映了驾驶人习惯性的驾驶方式,已有研究发现驾驶人在不同的道路上表现出不同的驾驶风格。但现有货车驾驶人驾驶风格研究成果的特征构建主要移植于小汽车驾驶人驾驶风格特征体系,鲜有研究考虑货车驾驶人行车的特点。
4、国内外学者围绕小汽车出行特征及其驾驶人驾驶风险已取得丰富的研究成果,但对重型货车出行特征及其驾驶人驾驶风险的研究相对较少,受数据获取困难的影响,相关研究存在数据规模小,样本量小的问题。在基于轨迹的货车驾驶风险评估研究中,往往仅基于车辆的运行参数评估驾驶风险,融入环境因素、道路因素的研究相对较少,鲜有研究聚焦于基于风格识别基础上量化评估单个货车驾驶人的驾驶风格及其风险性。
技术实现思路
1、本发明针对上述技术的局限性,提出一种基于全路网轨迹数据的重型货车驾驶人驾驶风险识别方法。
2、本发明的目的通过以下技术方案来实现,具体步骤如下:
3、s1:采集重型货车低频轨迹数据和重型货车行驶状态数据;
4、s2:考虑道路类型影响,构建重型货车驾驶人驾驶风险特征参数集;
5、s3:采用相关性分析,对驾驶风险特征参数集进行筛选;
6、s4:基于赋权法,对重型货车驾驶人驾驶风险进行量化评估;
7、s5:利用聚类算法划分重型货车驾驶人驾驶风险倾向类型;
8、s6:基于集成学习算法,构建重型货车驾驶人驾驶风险倾向识别模型。
9、s1中重型货车低频轨迹数据为重型货车行驶gps轨迹数据,轨迹数据平均采样间隔为30秒,包含以下信息:车辆编号、经度、纬度、时间戳、瞬时速度;所述重型货车行驶状态数据包括重型货车行驶过程中超速行驶状态数据、疲劳行驶状态数据、迫近行驶状态数据。
10、s2中构建重型货车驾驶人驾驶风险特征参数集包括:
11、驾驶风格风险特征参数集
12、s21:基于低频轨迹数据,匹配高速公路、国道、省道、县道、乡道道路和其他道路6类道路类型;
13、s22:提取驾驶速度特征参数,包括最大速度、平均最大速度、75分位速度和平均速度;
14、s23:提取超速驾驶特征参数,包括超速驾驶里程、超速驾驶时间、超速驾驶里程比例和超速驾驶时间比例;
15、s24:提取迫近驾驶特征参数,包括迫近驾驶里程、迫近驾驶时间、迫近驾驶时间比例、迫近驾驶里程比例;
16、疲劳风险特征参数集
17、s25:提取疲劳驾驶特征参数,包括疲劳驾驶时长、疲劳驾驶里程、疲劳驾驶时长比例、疲劳驾驶里程比例、疲劳驾驶次数、平均行程子链时长;
18、驾驶环境风险特征参数集
19、s26:提取驾驶环境特征参数,包括疲劳驾驶高发道路、超速驾驶高发道路、碰撞报警高发道路、高频行驶道路、高峰出行时段、深夜驾驶。
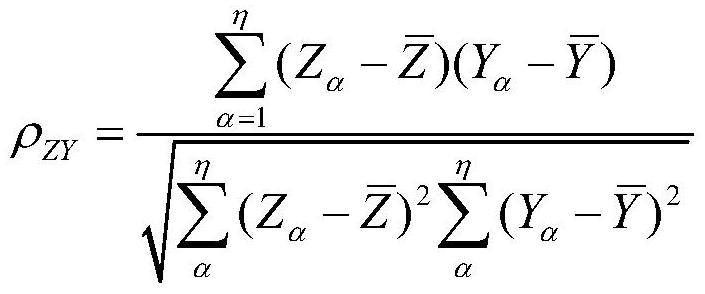
20、s3中利用皮尔逊相关性分析对所述驾驶风险特征参数集进行筛选,计算各道路类型下驾驶风格风险特征参数间的相关系数、疲劳风险特征参数间的相关系数、驾驶环境风险特征参数间的相关系数,计算公式为:
21、
22、式中:η为样本总数,ρzy表示变量y、z之间的相关程度;若0.8≤ρzy≤1,表示变量之间存在极强的相关性,对于存在极强相关性的两个特征参数选取一个进行保留。
23、s4中基于critic赋权法分别计算筛选后的驾驶风格风险特征参数、疲劳风险特征参数以及驾驶环境风险特征参数,对应得到三类特征参数中每个特征参数的权重,再分别将每类特征参数中的每个特征参数归一化后乘以对应的权重并累加得到驾驶风格风险评估值、疲劳风险评估值、驾驶环境风险评估值。
24、以驾驶风格风险为例,驾驶风格风险评估值具体计算如下:
25、
26、式中:h表示重型货车驾驶人的驾驶风格风险量化评估值,h∈[0,100];ρ为道路类型的总类数,ψ为道路类型值,取值分别对应高速公路、国道、省道、县道、乡镇道路和其它道路,hψ表示第ψ种道路类型条件下的驾驶风格风险的评估值,pψ表示第ψ种道路类型的驾驶风格风险权重。
27、
28、式中:dψ表示重型货车驾驶人在第ψ种道路类型上的驾驶里程。
29、
30、式中:ζ为某道路类型下驾驶风格风险评估指标的总数,ξ的取值分别对应经过评估指标筛选后的特征。ωψξ表示第ψ种道路类型的第ξ个特征的权重,ωψξ∈[0,1];mψξ表示第ψ种道路类型的第ξ个指标的归一化取值,mψξ∈[0,1]。
31、
32、式中:nψξ为第ψ种道路类型的第ξ个评估指标值。
33、s5中以重型货车驾驶人在驾驶风格风险、疲劳风险以及驾驶环境风险三个维度的风险评估值作为变量进行聚类,利用k-means++聚类算法划分重型货车驾驶人驾驶风险倾向类型。
34、s6中以筛选出的特征参数作为模型输入特征,以聚类得到的驾驶风险倾向作为模型训练标签,采用stacking集成学习算法构建所述重型货车驾驶人驾驶风险倾向识别模型。
35、与现有技术相比,本发明具有以下优势和积极效果:
36、(1)通过分析重型货车的时空出行规律,挖掘重型货车出行的危险时段、危险道路等,一定程度上可为重型货车重点监控时段与区域的确定提供参考,成果可为制作重型货车的时空可视化大屏提供支撑,并应用于路网层面对重型货车的监测,对于加强重型货车监管水平具有迫切的现实意义。
37、(2)本发明对重型货车驾驶人驾驶风险快速识别并定量评估,进而准确识别驾驶风险倾向,对重型货车驾驶人进行精细化管理,可用于开发重型货车驾驶风险离线监测应用,并应用于对重型货车驾驶人的驾驶风险预判和教育培训、货运公司的司机选派与绩效考核等领域。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189009.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表