一种智能汽车道路运行适应性的评估与预测方法及系统
- 国知局
- 2024-07-31 21:20:48
本发明涉及智能汽车交通安全,尤其涉及一种智能汽车道路运行适应性的评估与预测方法以及一种智能汽车道路运行适应性的评估与预测系统。
背景技术:
1、目前,智能汽车还处于发展和技术探索阶段,安全仍然是需要考虑的重点。当前智能汽车安全保障策略中,没有综合考虑宏观道路环境、中观周边车辆对微观智能汽车运行适应性的综合影响。
技术实现思路
1、针对上述问题,本发明提供了一种智能汽车道路运行适应性的评估与预测方法及系统,通过充分集成会对智能汽车道路运行适应性产生影响的道路与交通等不同方面信息,宏观、中观、微观等不同维度的信息,以及静态和动态等不同类型要素的信息,通过多层动态贝叶斯网络实现多因素影响下智能汽车运行适应性的演变与预测,能够在智能汽车被驾驶员接管之前实现安全风险的提前预测,提高智能汽车的运行安全性。
2、为实现上述目的,本发明提供了一种智能汽车道路运行适应性的评估与预测方法,包括:
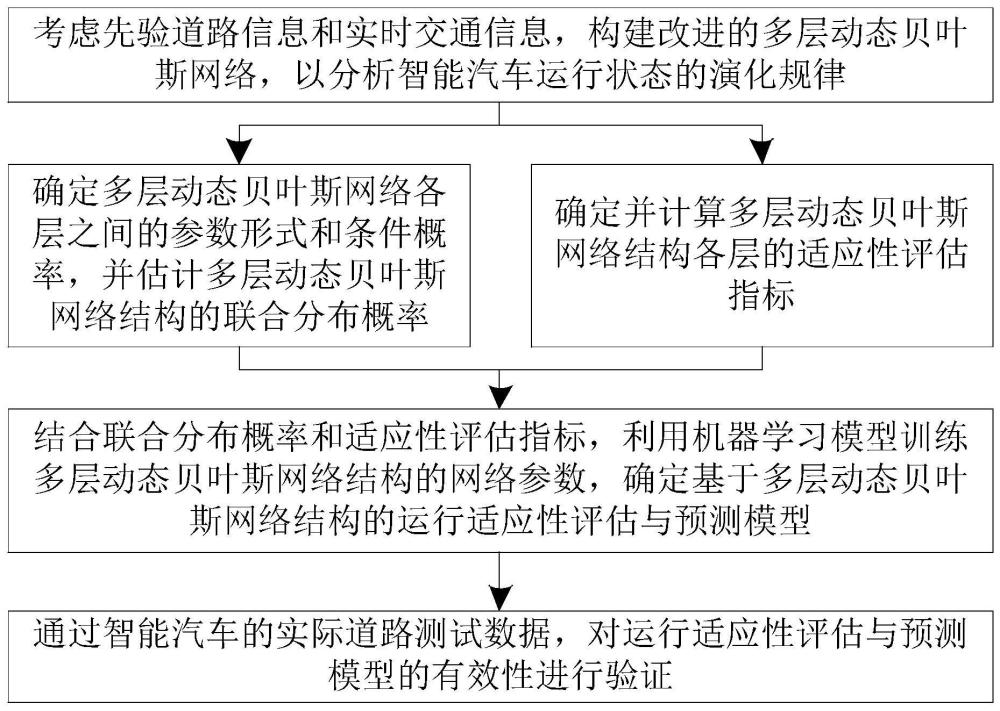
3、考虑先验道路信息和实时交通信息,构建改进的多层动态贝叶斯网络,以分析智能汽车运行状态的演化规律;
4、确定所述多层动态贝叶斯网络各层之间的参数形式和条件概率,并估计所述多层动态贝叶斯网络结构的联合分布概率;
5、确定并计算所述多层动态贝叶斯网络结构各层的适应性评估指标;
6、结合所述联合分布概率和所述适应性评估指标,利用机器学习模型训练所述多层动态贝叶斯网络结构的网络参数,确定基于所述多层动态贝叶斯网络结构的运行适应性评估与预测模型;
7、通过智能汽车的实际道路测试数据,对所述运行适应性评估与预测模型的有效性进行验证。
8、在上述技术方案中,优选地,所述考虑先验道路信息和实时交通信息,构建改进的多层动态贝叶斯网络,以分析智能汽车运行状态的演化规律,具体方法包括:
9、确定所述多层动态贝叶斯网络的层次包括先验道路信息层、宏观道路环境层、中观周边车辆层、微观智能汽车运行层和实时交通流信息层五个层次;
10、确定所述先验道路信息层包括基础设施因素、历史交通流因素、交通参与者因素和环境因素,所述实时交通流信息层包括当前智能汽车和周边车辆的位置坐标信息、方向信息、速度信息和加速度信息;
11、确定所述宏观道路环境层、所述中观周边车辆层和所述微观智能汽车运行层的适应性指标,所述宏观道路环境层包括道路环境复杂度指标;
12、依据所述多层动态贝叶斯网络结构图节点之间的连接,确定各动态贝叶斯网络层之间的依赖关系,构建所述多层动态贝叶斯网络结构。
13、在上述技术方案中,优选地,所述确定所述多层动态贝叶斯网络各层之间的参数形式和条件概率,并估计所述多层动态贝叶斯网络结构的联合分布概率,具体方法包括:
14、依据所述先验道路信息层和所述宏观道路环境层,确定道路环境复杂度的条件概率p(recn|prcn),计算方式为:
15、
16、
17、其中,pk和sk分别是事故类型k在该路段发生的概率和严重程度,是基于先验道路信息层的因素及其影响系数计算的该路段道路环境复杂度;
18、依据上一时刻中观周边车辆层的适应性指标和当前时刻的实时交通流信息层,确定当前时刻的中观周边车辆适应性的条件概率p(ssrt|ssrt-1,rtct),计算公式为:
19、p(ssrt|ssrt-1,rtct)=p(ssrt|ssrt-1)=p(ssrt|rtct-1)
20、其中,ssrt为t时刻的中观周边车辆层的信息,ssrt-1为t-1时刻的中观周边车辆层的信息,rtct为t时刻的实时交通流信息层的信息,rtct-1为t-1时刻的实时交通流信息层的信息;
21、依据上一时刻的中观周边车辆层适应性指标、上一时刻微观智能汽车运行层适应性指标及智能汽车行驶路段的宏观道路环境层的道路环境复杂度指标,确定当前时刻的微观智能汽车运行层适应性指标的条件概率p(asrt|asrt-1,ssrt-1,recn),计算方式为:
22、p(asrt|asrt-1,ssrt-1,recn)=ψ(asrt-1,ssrt-1)×p(asrt|recn)
23、其中,ψ是通过机器学习模型训练的上一时刻适应性指标和当前时刻适应性指标的相关关系,p(asrt|recn)是不同道路环境复杂度等级下的微观智能汽车运行适应性的先验概率统计分布;
24、当智能汽车能得到准确的先验道路信息并感知到实时交通流信息时,智能汽车运行适应性的联合分布概率p(prcn,recn,asr0:t,ssr0:t,rtc0:t)的计算公式为:
25、
26、在上述技术方案中,优选地,所述确定并计算所述多层动态贝叶斯网络结构各层的适应性评估指标的具体方法包括:
27、计算中观周边车辆层的适应性指标,包括平均车头间距ash、周边车辆速度均值sms、周边车辆速度标准差sds、智能汽车与周边车辆速度差sdas、平均车头时距ath,计算公式为:
28、
29、
30、
31、sdas=sms-vav
32、
33、其中,m为智能汽车感知范围内周边车辆的数量,gap(i)为车辆i和其前车的距离;vsv和vav分别为周边车辆和智能汽车的速度;vf为后车的速度;
34、计算微观智能汽车运行层适应性指标,包括碰撞时距ttc、避免碰撞减速率drac、紧急减速碰撞指标picud、单步概率风险场spdrf和驾驶潜在风险场drpfm,具体通过下列公式计算:
35、
36、
37、
38、spdrf=s×p
39、其中,
40、
41、
42、其中,
43、
44、
45、其中,aav和asv分别表示智能汽车和周边车辆的加速度,δav和δsv分别表示智能汽车和周边车辆的反应时间;δdlon、δdlat、δvlon和δvlat分别表示横向和纵向的相对距离和相对速度;mi、mi、vi、ai、xi、yi分别表示周边车辆的等效质量、质量、速度、加速度、切向和法向位置;λ、β1、β2、τ、α为常数。
46、在上述技术方案中,优选地,所述利用机器学习模型训练所述多层动态贝叶斯网络结构的网络参数的具体方法包括:
47、通过微观智能汽车适应性指标标定风险状态,当任一指标超过风险阈值时,标定智能汽车的风险状态为危险,否则标定为安全;
48、通过lstm和xgboost两种机器学习模型,基于上一时刻风险预测得到下一时刻风险,计算得到风险状态的准确率accuracy、召回率recall和特异度specificity:
49、
50、
51、
52、其中,tdangerous、tsafe、fdangerous、fsafe分别表示智能汽车风险状态为真的危险、真的安全、假的危险、假的安全;
53、基于预测结果,确定相关关系ψ:
54、
55、在上述技术方案中,优选地,所述通过智能汽车的实际道路测试数据,对所述运行适应性评估与预测模型的有效性进行验证,具体方法包括:
56、利用智能汽车实际道路测试过程中的数据标定接管状态,以及将驾驶员主动控制车辆的时间段标定为接管状态,设定对应风险状态为“危险”,将智能汽车功能退出或失效;其他时间段标定为非接管状态,设定对应风险状态为“安全”;
57、通过对接管预测的准确率aavd和召回率ravd确定运行适应性预测模型的预测效果:
58、
59、
60、其中,td、fd、ta和fa分别表示真的接管预测的真阳率、假阳率、真阴率和假阴率。
61、本发明还提出一种智能汽车道路运行适应性的评估与预测系统,应用如上述技术方案中任一项公开的智能汽车道路运行适应性的评估与预测方法,包括:
62、网络构建模块,用于考虑先验道路信息和实时交通信息,构建改进的多层动态贝叶斯网络,以分析智能汽车运行状态的演化规律;
63、概率计算模块,用于确定所述多层动态贝叶斯网络各层之间的参数形式和条件概率,并估计所述多层动态贝叶斯网络结构的联合分布概率;
64、指标计算模块,用于确定并计算所述多层动态贝叶斯网络结构各层的适应性评估指标;
65、模型训练模块,用于结合所述联合分布概率和所述适应性评估指标,利用机器学习模型训练所述多层动态贝叶斯网络结构的网络参数,确定基于所述多层动态贝叶斯网络结构的运行适应性评估与预测模型;
66、模型验证模块,用于通过智能汽车的实际道路测试数据,对所述运行适应性评估与预测模型的有效性进行验证。
67、在上述技术方案中,优选地,所述网络构建模块具体用于:
68、确定所述多层动态贝叶斯网络的层次包括先验道路信息层、宏观道路环境层、中观周边车辆层、微观智能汽车运行层和实时交通流信息层五个层次;
69、确定所述先验道路信息层包括基础设施因素、历史交通流因素、交通参与者因素和环境因素,所述实时交通流信息层包括当前智能汽车和周边车辆的位置坐标信息、方向信息、速度信息和加速度信息;
70、确定所述宏观道路环境层、所述中观周边车辆层和所述微观智能汽车运行层的适应性指标,所述宏观道路环境层包括道路环境复杂度指标;
71、依据所述多层动态贝叶斯网络结构图节点之间的连接,确定各动态贝叶斯网络层之间的依赖关系,构建所述多层动态贝叶斯网络结构。
72、在上述技术方案中,优选地,所述概率计算模块具体用于:
73、依据所述先验道路信息层和所述宏观道路环境层,确定道路环境复杂度的条件概率p(recn|prcn),计算方式为:
74、
75、
76、其中,pk和sk分别是事故类型k在该路段发生的概率和严重程度,是基于先验道路信息层的因素及其影响系数计算的该路段道路环境复杂度;
77、依据上一时刻中观周边车辆层的适应性指标和当前时刻的实时交通流信息层,确定当前时刻的中观周边车辆适应性的条件概率p(ssrt|ssrt-1,rtct),计算公式为:
78、p(ssrt|ssrt-1,rtct)=p(ssrt|ssrt-1)=p(ssrt|rtct-1)
79、其中,ssrt为t时刻的中观周边车辆层的信息,ssrt-1为t-1时刻的中观周边车辆层的信息,rtct为t时刻的实时交通流信息层的信息,rtct-1为t-1时刻的实时交通流信息层的信息;
80、依据上一时刻的中观周边车辆层适应性指标、上一时刻微观智能汽车运行层适应性指标及智能汽车行驶路段的宏观道路环境层的道路环境复杂度指标,确定当前时刻的微观智能汽车运行层适应性指标的条件概率p(asrt|asrt-1,ssrt-1,recn),计算方式为:
81、p(asrt|asrt-1,ssrt-1,recn)=ψ(asrt-1,ssrt-1)×p(asrt|recn)
82、其中,ψ是通过机器学习模型训练的上一时刻适应性指标和当前时刻适应性指标的相关关系,p(asrt|recn)是不同道路环境复杂度等级下的微观智能汽车运行适应性的先验概率统计分布;
83、当智能汽车能得到准确的先验道路信息并感知到实时交通流信息时,智能汽车运行适应性的联合分布概率p(prcn,recn,asr0:t,ssr0:t,rtc0:t)的计算公式为:
84、
85、在上述技术方案中,优选地,所述模型训练模块具体用于:
86、通过微观智能汽车适应性指标标定风险状态,当任一指标超过风险阈值时,标定智能汽车的风险状态为危险,否则标定为安全;
87、通过lstm和xgboost两种机器学习模型,基于上一时刻风险预测得到下一时刻风险,计算得到风险状态的准确率accuracy、召回率recall和特异度specificity:
88、
89、
90、
91、其中,tdangerous、tsafe、fdangerous、fsafe分别表示智能汽车风险状态为真的危险、真的安全、假的危险、假的安全;
92、基于预测结果,确定相关关系ψ:
93、。
94、
95、与现有技术相比,本发明的有益效果为:通过充分集成会对智能汽车道路运行适应性产生影响的道路与交通等不同方面信息,宏观、中观、微观等不同维度的信息,以及静态和动态等不同类型要素的信息,通过多层动态贝叶斯网络实现多因素影响下智能汽车运行适应性的演变与预测,能够在智能汽车被驾驶员接管之前实现安全风险的提前预测,提高了智能汽车的运行安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189350.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表