一种基于变速度模型的事件相机旋转运动描述方法
- 国知局
- 2024-07-31 23:11:26
本发明涉及视觉导航,具体涉及一种基于变速度模型的事件相机旋转运动描述方法。
背景技术:
1、事件相机是一种仿生视觉传感器,通过模拟生物视网膜的成像机理,以异步稀疏的方式响应自然界的相对光强变化,能够输出一串异步事件流。事件相机具有微秒级的时间分辨率,不会产生运动模糊,在高速、高机动条件下能稳定地输出视觉信息。事件相机的上述优势使之成为少见的能够直接用于旋转测量的视觉传感器。在具有挑战性的高速、高机动的旋转场景下,事件相机仍然能够完整地记录旋转动态。基于预设的事件相机旋转运动模型,可以利用原始事件流数据估计模型参数,从而重建旋转运动规律。
2、然而,现有的事件相机旋转运动估计方法均基于恒速度假设实现:基于恒速度模型将事件重映射至参考时间戳,形成的重映射结果直接用于角速度估计。基于恒速度模型的事件相机旋转运动描述方法存在一定的缺陷。第一,恒速度模型严格要求所考虑时间区间的长度足够小,才能使得匀速近似是合理的,而针对纹理与运动复杂度不同的现实场景该参数难以确定;第二,恒速度模型理论上只能描述最简单的匀速旋转运动,在相机做高机动动态时,即使短时间内其速度、加速度均会发生剧烈变化,与最基本的恒速度模型不具有一致性,且基于可靠性未知的先验假设去建模一段未知的运动也是有失合理性的;第三,恒速度模型中涉及的角速度参数实质上的物理意义是“平均旋转速度”而非“实时旋转速度”,因此该模型缺乏对于实际运动规律的重建的意义。
技术实现思路
1、鉴于上述问题,本发明提供了一种基于变速度模型的事件相机旋转运动描述方法,解决了现有技术中基于恒速度假设实现的事件相机旋转运动估计精确度低的技术问题。
2、本发明提供了一种基于变速度模型的事件相机旋转运动描述方法,包括以下步骤:
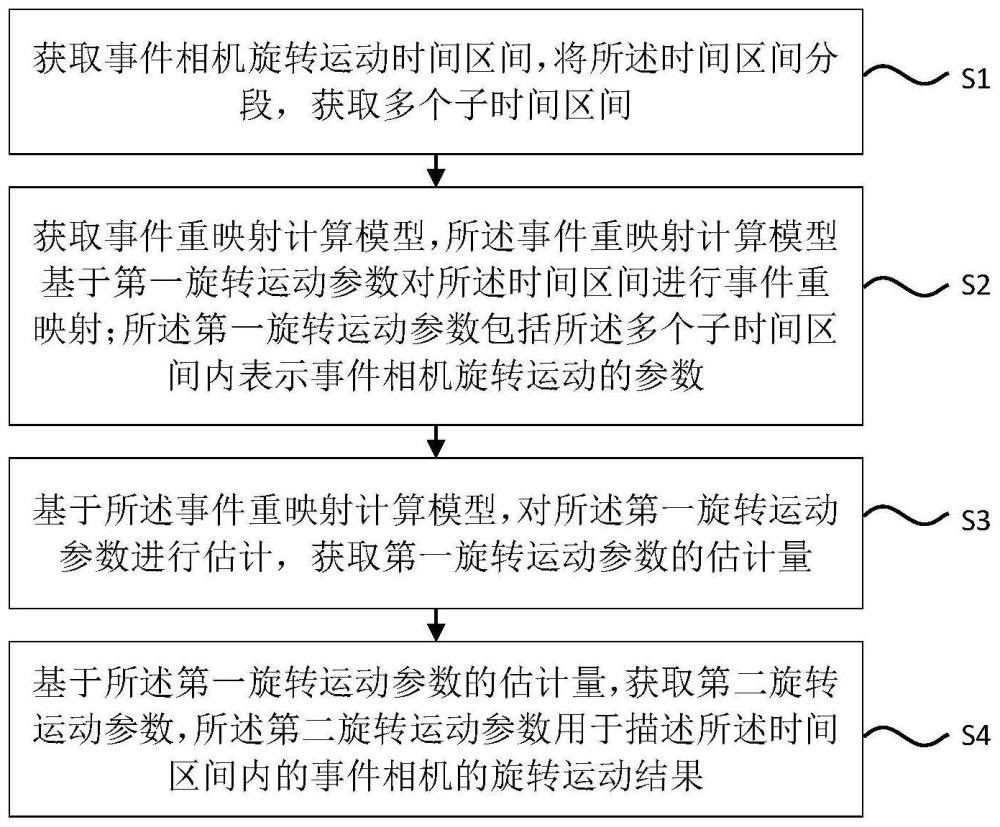
3、步骤s1、获取事件相机旋转运动时间区间,将所述时间区间分段,获取多个子时间区间;
4、步骤s2、获取事件重映射计算模型,所述事件重映射计算模型基于第一旋转运动参数对所述时间区间进行事件重映射;所述第一旋转运动参数包括所述多个子时间区间内表示事件相机旋转运动的参数;
5、步骤s3、基于所述事件重映射计算模型,对所述第一旋转运动参数进行估计,获取第一旋转运动参数的估计量;
6、步骤s4、基于所述第一旋转运动参数的估计量,获取第二旋转运动参数,所述第二旋转运动参数用于描述所述时间区间内的事件相机的旋转运动结果。
7、优选地,步骤s1中,所述获取多个子时间区间具体为获取2个子时间区间,分别为第一子时间区间和第二子时间区间。
8、优选地,所述事件重映射计算模型用于将所述时间区间内的事件的像素坐标重映射到所述时间区间的初始时间处的像素坐标;所述事件重映射计算模型中,对所述第一子时间区间和第二子时间区间的事件分别进行不同的计算处理;所述第一旋转运动参数包括所述时间区间的初始时间处旋转速度、第一子时间区间内的角加速度和第二子时间区间内的角加速度。
9、优选地,所述事件重映射计算模型的具体计算方式为:
10、
11、对于δtk1=tk-τm,δtk2=0,对于δtk1=τm_mid-τm,δtk2=tk-τm_mid;
12、其中,ek表示所述时间区间内的第k个事件,tk为事件ek的发生时刻,τm为所述时间区间初始时刻,τm_mid为子区间分界处的时刻,τm+1为所述时间区间结束时刻,表示第一子时间区间内的事件集合,表示第二子时间区间内的事件集合;w(xk,ωm,δtk)为重映射后的事件ek的像素坐标,xk为重映射前事件ek的像素坐标,ωm为事件相机在所述时间区间初始时刻的旋转速度,δtk=tk-τm,为事件发生时刻与初始时刻之间的时长,exp{·}为指数映射,为旋转速度ωm的斜对称矩阵,为第一子时间区间内的角加速度αm1的斜对称矩阵,为第二子时间区间内的角加速度αm2的斜对称矩阵,x′k为重映射前事件ek的反投影坐标;所述第一旋转运动参数包括ωm、αm1和αm2。
13、优选地,步骤s3中,对所述第一旋转运动参数进行估计的方式包括:基于滤波的方法、基于优化的方法和基于人工智能的方法。
14、优选地,所述第二旋转运动参数包括所述时间区间内的旋转角度和所述时间区间结束时刻的旋转速度,步骤s4具体包括:基于所述第一旋转运动参数的估计量,并基于第一子时间区间和第二子时间区间的时长,获取所述时间区间内的旋转角度;基于所述第一旋转运动参数的估计量,获取所述时间区间结束时刻的旋转速度。
15、优选地,所述基于所述第一旋转运动参数的估计量,并基于第一子时间区间和第二子时间区间的时长,获取所述时间区间内的旋转角度具体包括:所述时间区间内的旋转角度用旋转矩阵r描述,旋转矩阵r的计算方式为:
16、
17、其中,exp{·}为指数映射,为旋转速度ωm的斜对称矩阵,为角加速度αm1的斜对称矩阵,为角加速度αm2的斜对称矩阵,tm1、tm2分别第一子时间区间和第二子时间区间的时长。
18、优选地,所述基于所述第一旋转运动参数的估计量,获取所述时间区间结束时刻的旋转速度具体包括:所述时间区间结束时刻的旋转速度ωm+1的计算表达式为:
19、ωm+1=ωm+αm1·tm1+αm2·tm2
20、其中,ωm为事件相机在所述时间区间初始时刻的旋转速度,αm1、αm2分别为第一子时间区间和第二子时间区间内的角加速度,tm1、tm2分别为第一子时间区间和第二子时间区间的长度。
21、优选地,步骤s1中所述将所述时间区间分段的方式包括:平均分段和按特定比例分段。
22、与现有技术相比,本发明至少具有如下有益效果:
23、(1)本发明提供的技术方案由于突破了速度不变的假设,不需要严格选取很短的时间区间,选取的时间区间可以延长,或依据实践中的具体需求动态地、自适应地划分时间区间;
24、(2)本发明的技术方案覆盖更多的事件相机姿态变化模式,包括不同的角速度和角加速度变化趋势,例如速度突变、运动方向突然倒转等特殊情况,适用性更广泛;
25、(3)本发明的技术方案能够同时为事件相机的角速度与角度的实时变化趋势提供借鉴,从而提示有关事件相机旋转运动规律的更丰富的信息。
技术特征:1.一种基于变速度模型的事件相机旋转运动描述方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于变速度模型的事件相机旋转运动描述方法,其特征在于:
3.根据权利要求2所述的基于变速度模型的事件相机旋转运动描述方法,其特征在于:
4.根据权利要求3所述的基于变速度模型的事件相机旋转运动描述方法,其特征在于:
5.根据权利要求3所述的基于变速度模型的事件相机旋转运动描述方法,其特征在于:
6.根据权利要求4所述的基于变速度模型的事件相机旋转运动描述方法,其特征在于,
7.根据权利要求6所述的基于变速度模型的事件相机旋转运动描述方法,其特征在于:
8.根据权利要求7所述的基于变速度模型的事件相机旋转运动描述方法,其特征在于:
9.根据权利要求8所述的基于变速度模型的事件相机旋转运动描述方法,其特征在于:步骤s1中所述将所述时间区间分段的方式包括:平均分段和按特定比例分段。
技术总结本发明涉及视觉导航技术领域,具体涉及一种基于变速度模型的事件相机旋转运动描述方法,包括以下步骤:获取事件相机旋转运动时间区间,将所述时间区间分段,获取多个子时间区间;获取事件重映射计算模型,所述事件重映射计算模型基于第一旋转运动参数对所述时间区间进行事件重映射;基于所述事件重映射计算模型,对所述第一旋转运动参数进行估计,获取第一旋转运动参数的估计量;基于所述第一旋转运动参数的估计量,获取第二旋转运动参数,所述第二旋转运动参数用于描述所述时间区间内的事件相机的旋转运动结果;本发明能够提高事件相机旋转运动估计的精确度和适用范围。技术研发人员:金靖,师晨洋,宋凝芳,卫博艺,张艺博,丁子辰受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/196310.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表