一种干旱及半干旱地区黑臭水体全面排查方法及系统与流程
- 国知局
- 2024-07-31 23:18:24
本发明属于图像处理,具体涉及一种干旱及半干旱地区黑臭水体全面排查方法及系统。
背景技术:
1、黑臭水体是指城市或自然水体中由于大量有机物和无机物积累、腐烂而形成的具有强烈臭味和黑色外观的污水,严重影响人类健康和自然环境。现有黑臭水体排查技术主要包括通过公众举报线索、卫星遥感识别和徒步排查等方式开展,由于对排查对象未进行限定,导致排查黑臭水体数量不全,排查准确率不高,因此,需要通过系统分析河流水量影响因素,结合长期水质监测,建立干旱及半干旱地区河流水体自动识别方法,并通过土地利用类型判定、卫星遥感解译、水系存在时段识别和水系自动勾划的方式,确定城市水系清单及水系图,解决当前黑臭水体排查方法不统一、排查数量不全面等问题,进而降低全面排查黑臭水体带来的人力物力成本。
2、例如中国专利cn113780071b,公开一种黑臭水体遥感识别系统及方法,包括主控装置和多个监测装置构成的通信网络,多个监测装置分别布设在待识别点,用于按照预定周期获取所处水域的溶解氧、氨氮值、透明度及色度,计算所处水域的归一化指标并存储;主控装置,用于发送广播指令,对监测装置返回的归一化指标进行判断,当归一化指标在第一预设范围内时,确定对应的水域水体为目标水体,发送黑臭水体识别需求;遥感影像获取模块,用于从原始遥感影像中获取目标水体的遥感影像;黑臭水体确认模块,用于根据目标水体在各个波段的遥感反射率,计算目标水体的黑臭水体指标,当黑臭水体指标在第二预设范围内,则确定目标水体为黑臭水体。又例如中国专利cn116403112a,公开了一种农村黑臭水体排查范围划定方法和装置,属于遥感技术领域。该发明首先基于国家基础地理信息数据和土地利用分类数据,获取居民点初始筛选区域,并基于遥感影像数据提取得到居民点斑块。对居民点初始筛选区域进行网格划分,先根据网格内居民点斑块的面积占网格面积的百分比对网格进行初步筛选,然后根据网格及其周围八个网格的居民点斑块的占比信息对网格进行二次筛选。合并保留的所有网格并进行缓冲,得到农村黑臭排查范围。该发明基于遥感影像数据、土地利用类型数据和国家基础地理信息数据等,确定了农村黑臭水体的排查范围,可以实现农村黑臭水体排查范围的快速、准确划定,为农村生态环境管理提供技术支撑。
3、然而,上述现有技术中对黑臭水体的识别排查方法较单一,且未对黑臭水体的变化趋势进行分析,在实际情况中,黑臭水体的演变过程和范围变化也会影响识别排查的准确率。
技术实现思路
1、为解决上述问题,本发明提供了一种干旱及半干旱地区黑臭水体全面排查方法及系统,以解决现有技术中的问题。
2、为了达到上述的发明目的,本发明提出一种干旱及半干旱地区黑臭水体全面排查方法,包括:
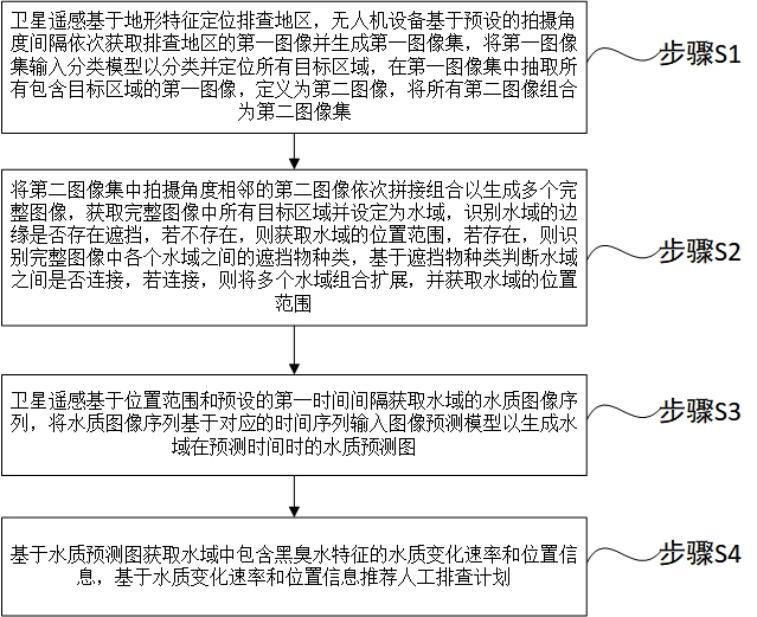
3、卫星遥感基于气象特征定位排查地区,无人机设备基于预设的拍摄角度间隔依次获取所述排查地区的第一图像并生成第一图像集,将所述第一图像集输入分类模型以分类并定位所有目标区域,在所述第一图像集中抽取所有包含所述目标区域的所述第一图像,定义为第二图像,将所有第二图像组合为第二图像集;
4、将所述第二图像集中拍摄角度相邻的所述第二图像依次拼接组合以生成多个完整图像,获取所述完整图像中所有目标区域并设定为水域,识别所述水域的边缘是否存在遮挡,若不存在,则获取所述水域的位置范围,若存在,则识别所述完整图像中各个所述水域之间的遮挡物种类,基于所述遮挡物种类判断所述水域之间是否连接,若连接,则将多个所述水域组合扩展,并获取所述水域的位置范围;
5、所述卫星遥感基于所述位置范围和预设的第一时间间隔获取所述水域的水质图像序列,将所述水质图像序列基于对应的时间序列输入图像预测模型以生成所述水域在预测时间时的水质预测图;
6、基于所述水质预测图获取所述水域中包含黑臭水体特征的水质变化速率和位置信息,基于所述水质变化速率和所述位置信息推荐人工排查计划。
7、进一步地,获取所述目标区域包括以下步骤:
8、设置水体标签,基于所述水体标签建立训练数据集,基于所述训练数据集生成所述分类模型,所述第一图像集输入所述分类模型中,所述分类模型将所述第一图像集中所有第一图像分割以生成多个第一子区域,并识别所述水体标签对应的第一子区域,将所述水体标签对应的第一子区域设定为所述目标区域。
9、进一步地,生成所述完整图像包括以下步骤:
10、将所述第二图像集中任意拍摄角度相邻的两个第二图像设定为待组合图像,分别提取所述待组合图像的第一特征点,并设定为目标特征点,计算所述目标特征点在所述待组合图像中的位移矢量;
11、设置区域框,基于所述区域框将所述待组合图像划分为多个第二子区域,基于所述位移矢量获取每个第二子区域的矢量相似值,基于所述区域框的大小设置第一数量,将所述矢量相似值由大到小依次排列,并基于所述第一数量依次选取最大矢量相似值对应的第二子区域并设定为边缘区域,基于相同的所述边缘区域将所述待组合图像中两个第二图像对齐拼接以生成组合图像;
12、获取所述第二图像集中拍摄角度相邻的所有第二图像的第二数量,基于所述第二数量重复上述步骤将所述组合图像与剩余的第二图像对齐拼接,并生成多个所述完整图像。
13、进一步地,获取所述第二子区域的所述矢量相似值包括以下步骤:
14、基于第一公式计算所述位移矢量l,所述第一公式为:,其中,和分别为相邻待组合图像的匹配所述目标特征点的空间坐标;
15、基于第二公式计算所述矢量相似值m,所述第二公式为:,其中,n为所述待组合图像中第一个第二图像的所述第二子区域包含所述目标特征点的数量,为所述第二子区域中第i个目标特征点的所述位移矢量,为模长运算符号。
16、进一步地,基于以下步骤识别所述水域的边缘是否存在遮挡:
17、分别获取所述完整图像中所有所述水域的边缘像素点和对应的像素值,获取所述水域之间的最短距离,并将所述最短距离对应的像素点依次连接生成像素连接线,基于预设的第三数量分别在所述像素连接线的两个端点处抽取所述水域的像素点并分别设定为第一像素组和第二像素组,分别获取所述第一像素组和所述第二像素组对应的像素值的平均差,若两个平均差的差值小于等于预设的第一阈值,则所述水域的边缘存在遮挡,否则,所述水域的边缘不存在遮挡。
18、进一步地,获取所述水域的位置范围包括以下步骤:
19、若所述遮挡物种类不为桥梁类型,则判定所述水域不连接,基于预设的第二时间间隔获取所述完整图像对应的两个对比图像,并分别定义为第一对比图和第二对比图,构建图像坐标系,基于所述图像坐标系分别获取所述第一对比图和所述第二对比图中相同所述水域的像素位置,并将两个所述对比图像中所述水域包含的所述像素位置进行叠加扩展,使得所述水域由所述像素位置组成的第一面积最大,并将最大的所述第一面积设定为所述水域的所述位置范围;
20、若所述遮挡物种类为所述桥梁类型,则所述水域相连接,基于所述图像坐标系获取所述桥梁包含的最小遮挡范围,并将所述最小遮挡范围设定为遮挡面积,获取与所述桥梁相连接的所述水域的边缘像素值,获取所述边缘像素值的众数,将所述边缘像素值的众数设定为所述遮挡面积的像素值,将与所述桥梁相连接的所述水域和所述遮挡面积组合扩展,并设定为所述水域的位置范围。
21、进一步地,基于以下步骤生成所述水质预测图:
22、所述水质图像序列包括同一水域的水质分布图和对应的时间序列,所述水质分布图是指遥感卫星获取所述水域的光谱色彩图像,所述图像预测模型是由多个神经元构建的神经网络模型,所述水质分布图基于所述时间序列输入所述图像预测模型中,所述图像预测模型基于相同像素坐标对所述水质分布图按照预设的形状尺寸分割,以生成块序列,获取所述块序列的像素值序列,所述图像预测模型基于所述像素值序列计算权重系数,并基于权重系数输出所述块序列的像素预测值,将所有所述像素预测值基于所述形状尺寸组合生成所述水质预测图。
23、进一步地,设定人工排查计划包括以下步骤:
24、建立黑臭水体严重等级,基于所述水质变化速率和所述黑臭水体严重等级获取所述水域中存在所述黑臭水体特征的分布子区域和对应的严重程度,基于所述水域的位置信息定位所述分布子区域的经纬坐标,将所述分布子区域对应的所述预测时间、所述严重程度和所述经纬坐标发送至终端,以生成排查计划。
25、进一步地,获取所述水质变化速率包括以下步骤:
26、获取所述排查地区的规划分布区域和对应的人口密度,获取所述规划分布区域与所述分布子区域之间的位置距离,将所述位置距离最小的所述规划分布区域设定为所述分布子区域的影响区域,并将所述影响区域对应的人口密度设定为所述分布子区域的风险数值,将所述风险数值大于等于预设的密度阈值的所述分布子区域对应的所述水域设定为高风险区域,所述高风险区域包括人口密集区和新开发建设区域;
27、基于第三公式计算所述水质变化速率v,所述第三公式为:,其中,和为权重系数,m为所述分布子区域中包含的像素点的数量,t为所述预测时间,为所述水质预测图的所述分布子区域中第j个像素点的像素值,为所述水质图像序列的最后一个水质分布图的所述分布子区域中第j个像素点的像素值,为所述分布子区域对应的所述影响区域的风险数值。
28、本发明还提供了一种干旱及半干旱地区黑臭水体全面排查系统,该系统用于实现上述所述的一种干旱及半干旱地区黑臭水体全面排查方法,该系统主要包括:
29、图像获取模块,卫星遥感基于气象特征定位排查地区,无人机设备基于预设的拍摄角度间隔依次获取所述排查地区的第一图像并生成第一图像集,将所述第一图像集输入分类模型以分类并定位所有目标区域,在所述第一图像集中抽取所有包含所述目标区域的所述第一图像,定义为第二图像,将所有第二图像组合为第二图像集;
30、水域定位模块,将所述第二图像集中拍摄角度相邻的所述第二图像依次拼接组合以生成多个完整图像,获取所述完整图像中所有目标区域并设定为水域,识别所述水域的边缘是否存在遮挡,若不存在,则获取所述水域的位置范围,若存在,则识别所述完整图像中各个所述水域之间的遮挡物种类,基于所述遮挡物种类判断所述水域之间是否连接,若连接,则将多个所述水域组合扩展,并获取所述水域的位置范围;
31、水质预测模块,所述卫星遥感基于所述位置范围和预设的第一时间间隔获取所述水域的水质图像序列,将所述水质图像序列基于对应的时间序列输入图像预测模型以生成所述水域在预测时间时的水质预测图;
32、排查定位模块,基于所述水质预测图获取所述水域中包含黑臭水体特征的水质变化速率和位置信息,基于所述水质变化速率和所述位置信息推荐人工排查计划。
33、与现有技术相比,本发明的有益效果至少如下所述:
34、本发明首先通过设定无人机设备的拍摄角度间隔获取排查地区的第一图像集,然后通过分类模型在第一图像集中筛选包含目标区域的第二图像集,可以减少后续图像排查的数据量,只针对包含目标区域的图像范围进行分析,最后通过将第二图像集组合生成多个完整图像,并对完整图像中包含的多个水域进行遮挡识别,可以避免水域因遮挡出现排查误差的现象,进而提高水域排查的准确率。
35、本发明还通过水域的水质图像序列和图像预测模型输出水域在预测时间内的水质预测图,可以获取水质中存在黑臭水体特征的变化速率,即水质变化速率,通过水域中黑臭水体特征的位置信息精准定位排查坐标,进而推荐出人工排查计划,实现排查地区黑臭水体的排查效率和排查准确率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/196915.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表