遥感影像中坑塘水面的提取方法和装置与流程
- 国知局
- 2024-07-31 23:20:31
本发明涉及遥感和计算机视觉。更具体地说,本发明涉及一种遥感影像中坑塘水面的提取方法和装置。
背景技术:
1、在遥感领域中,地物解译作为从遥感数据中识别和分类地表地物的关键任务,为城市规划、环境监测和资源管理等细分领域提供了基础信息。随着计算机视觉技术的蓬勃发展,地物解译领域日益受益于先进的图像处理和机器学习技术。在水域提取方面,深度学习模型在高准确率和自动化方面取得了显著的成就。但是,深度学习模型通常需要将遥感影像拆分为多个固定尺寸的小区域块进行推理预测,对于区域块中的边缘水域,由于其对应的相同的水体特征以及地物信息的缺失,使得模型难以区分其是否为坑塘。
技术实现思路
1、本申请实施例的目的是,提供一种遥感影像中坑塘水面的提取方法和装置,其能够提高坑塘检测的准确性。本申请实施例主要通过下述技术方案实现:
2、本申请实施例的第一方面提供了一种遥感影像中坑塘水面的提取方法,包括:
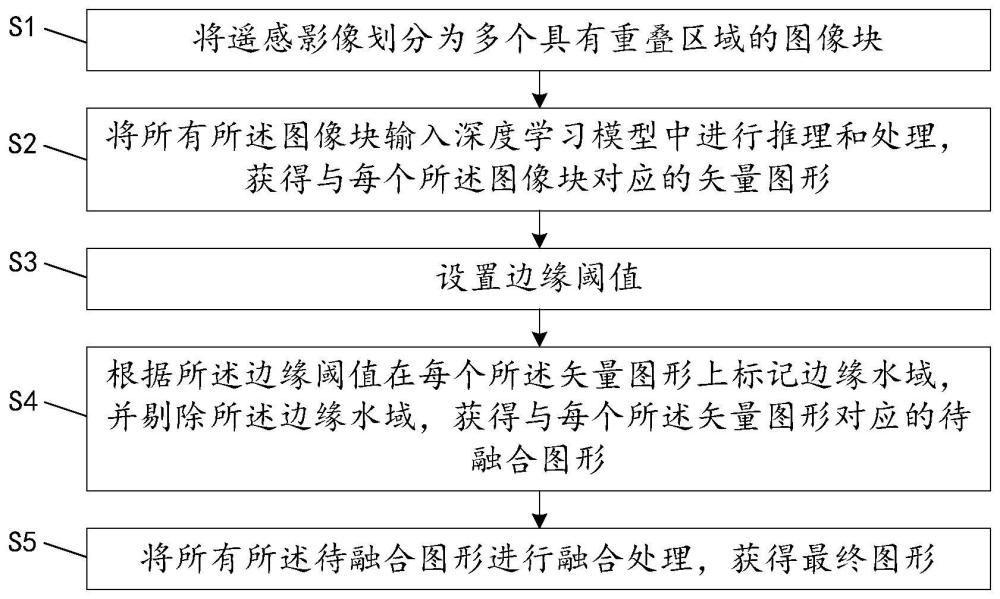
3、将遥感影像划分为多个具有重叠区域的图像块;
4、将所有所述图像块输入深度学习模型中进行推理和处理,获得与每个所述图像块对应的矢量图形;
5、设置边缘阈值;
6、根据所述边缘阈值在每个所述矢量图形上标记边缘水域,并剔除所述边缘水域,获得与每个所述矢量图形对应的待融合图形;
7、将所有所述待融合图形进行融合处理,获得最终图形,以提取坑塘。
8、根据本申请的一个实施例,所述将遥感影像划分为多个具有重叠区域的图像块步骤包括:
9、设置一个固定尺寸的窗口;
10、设置重叠度;
11、设置所述窗口在所述遥感影像上的滑动步幅;
12、所述窗口根据所述滑动步幅和所述重叠度按照预定路径在所述遥感影像上滑动,获取所述窗口在所述遥感影像上每个位置对应的图像块。
13、根据本申请的一个实施例,所述重叠度设置为0.5。
14、根据本申请的一个实施例,所述预定路径为:
15、所述窗口从所述遥感影像的左上角开始在水平方向滑动,直至所述窗口滑动至所述遥感影像的右上角,接着,所述窗口按照所述重叠度向左下方滑动至所述遥感影像的左侧,接着,所述窗口在水平方向滑动,直至所述窗口从遥感影像的左侧滑动至所述遥感影像的右侧,接着,所述窗口按照所述重叠度向左下方滑动至所述遥感影像的左侧,依此类推,直至所述窗口滑动至所述遥感影像上右下角。
16、根据本申请的一个实施例,将所有所述图像块输入深度学习模型中进行推理和处理,获得与每个所述图像块对应的矢量图形步骤包括:
17、将所有所述图像块输入深度学习模型中进行推理,获得与每个所述图像块对应的掩膜;
18、对所有所述掩膜进行矢量化处理,获得与每个所述图像块对应的矢量图。
19、根据本申请的一个实施例,对所有所述掩膜进行矢量化处理,获得与每个所述图像块对应的矢量图步骤包括:
20、采用opencv2的轮廓跟踪算法,计算出每个掩膜上与掩膜区域对应的角点在所述遥感影像中的像素位置;
21、根据每个掩膜对应的像素位置,将每个所述掩膜转化为对应的矢量图。
22、本申请实施例的第二方面提供了一种遥感影像中坑塘水面的提取装置,包括:
23、图像块划分模块,用于将遥感影像划分为多个具有重叠区域的图像块;
24、矢量图形获得模块,用于将所有所述图像块输入深度学习模型中进行推理和处理,获得与每个所述图像块对应的矢量图形;
25、边缘阈值设置模块,用于设置边缘阈值;
26、待融合图形获得模块,用于根据所述边缘阈值在每个所述矢量图形上标记边缘水域,并剔除所述边缘水域,获得与每个所述矢量图形对应的待融合图形;
27、融合模块,用于将所有所述待融合图形进行融合处理,获得最终图形,以提取坑塘。
28、本申请实施例的第三方面提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一种所述遥感影像中坑塘水面的提取方法的步骤。
29、本申请实施例的第四方面提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述遥感影像中坑塘水面的提取方法的步骤。
30、本申请实施例的有益效果包括:
31、本申请实施例提供的遥感影像中坑塘水面的提取方法,通过将遥感影像划分为多个具有重叠区域的图像块,将所有所述图像块输入深度学习模型中进行推理和处理,获得与每个所述图像块对应的矢量图形,接着,设置边缘阈值,根据所述边缘阈值在每个所述矢量图形上标记边缘水域,并剔除所述边缘水域,获得与每个所述矢量图形对应的待融合图形;将所有所述待融合图形进行融合处理,获得最终图形。由此,本申请可以在具有重叠区域的图像块的基础上,获得更加完整的识别结果(也即待融合图形),提高了普通水域提取的完整性。在融合所有待融合图形之后,本申请可以过滤掉重复出现的识别结果,增加最终图形的清晰度,由此能够提高坑塘检测的准确性。
技术特征:1.遥感影像中坑塘水面的提取方法,其特征在于,包括:
2.根据权利要求1所述的遥感影像中坑塘水面的提取方法,其特征在于,所述将遥感影像划分为多个具有重叠区域的图像块步骤包括:
3.根据权利要求2所述的遥感影像中坑塘水面的提取方法,其特征在于,所述重叠度设置为0.5。
4.根据权利要求2所述的遥感影像中坑塘水面的提取方法,其特征在于,所述预定路径为:
5.根据权利要求1所述的遥感影像中坑塘水面的提取方法,其特征在于,将所有所述图像块输入深度学习模型中进行推理和处理,获得与每个所述图像块对应的矢量图形步骤包括:
6.根据权利要求5所述的遥感影像中坑塘水面的提取方法,其特征在于,对所有所述掩膜进行矢量化处理,获得与每个所述图像块对应的矢量图步骤包括:
7.遥感影像中坑塘水面的提取装置,其特征在于,包括:
8.电子设备,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述权利要求1-6任一项所述遥感影像中坑塘水面的提取方法的步骤。
9.非暂态计算机可读存储介质,其特征在于,所述非暂态计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述权利要求1-6任一项所述遥感影像中坑塘水面的提取方法的步骤。
技术总结本发明涉及遥感和计算机视觉技术领域。本发明公开了遥感影像中坑塘水面的提取方法和装置,其能提高坑塘检测的准确性。所述遥感影像中坑塘水面的提取方法包括将遥感影像划分为多个具有重叠区域的图像块;将所有所述图像块输入深度学习模型中进行推理和处理,获得与每个所述图像块对应的矢量图形;设置边缘阈值;根据所述边缘阈值在每个所述矢量图形上标记边缘水域,并剔除所述边缘水域,获得与每个所述矢量图形对应的待融合图形;将所有所述待融合图形进行融合处理,获得最终图形,以提取坑塘。技术研发人员:赖为乾,李家鑫,司艳红,任伏虎受保护的技术使用者:中科云遥(深圳)科技有限公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/197085.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表