基于模型辅助网络的弹引多体系统动力学状态重构方法
- 国知局
- 2024-07-31 23:21:47
本发明涉及动力学与机器学习领域,具体涉及一种基于模型辅助网络的弹引多体系统动力学状态重构方法。
背景技术:
1、多体系统是指多个物体(刚体、弹性体、柔体、质点等)彼此通过一定的联结方式组成的系统。硬目标侵彻弹引系统即为典型例子。硬目标侵彻弹引系统通常包括弹壳、药、传感器壳、传感器、底螺等多个物体,物体彼此间通过多种联结方式传递冲击能量与过载信息。多体系统动力学方法允许人工和计算机自动推导总体传递方程和总体传递矩阵,具有精度高、可操作性强、计算成本低的特点。因此,它在包括发射动力学在内的各个工程领域得到了广泛的应用。
2、对于一个复杂多体动力学系统的状态信息提取主要可分为直接法和间接法。在直接法中,可以通过传感器直接测量系统的状态参数。但是由于系统的复杂程度高,传感器难以直接布置进行测试,并且这总方法伴随着很高成本。因此直接采取这种方法往往是不现实的。而对于间接方法,不可测直接测量的状态信息是基于可测子系统的响应所得到的。所以如何利用已知的系统特性和可测信息重构不可测的子系统的状态信息成为了这个问题的核心。
3、利用机械系统建模的动态响应特性进行间接测量是一种更有效的方法。因为动态响应(主要是加速度信号)可以很容易地通过传感器直接测量,这也成为对于间接方法的一个重要基础。但是复杂机械系统的非线性传递特性却成为了间接测量难度大的一个难题,尤其是在侵彻武器系统领域。由于弹体内部结构体积的约束,弹载传感器位置与弹头位置往往经过了复杂的弹引动力学系统传递过程。因此传感器所测到的信息与弹头的状态信息有很大的偏差,会导致弹载控制系统对于当前弹体状态误判,从而影响最终的毁伤效果。因此需要对弹引多体系统进行状态重构。
4、多体系统动力学状态重构是指对一个复杂多体动力学系统的状态信息进行重新提取的过程。在实际工程应用中,提前了解作用于多体动力系统中不同子系统的状态信息,对当前状态判定、故障分析和可靠性分析至关重要。
5、目前,弹引多体系统动力学状态重构方法普遍用纯数据驱动的方法取代简单的原则模型,这些方法使用大量标记数据集进行训练,如文献(j.zhou,l.dong,w.guan,andj.yan,“impact load identification of nonlinear structures using deeprecurrent neural network,”mech.syst.signal process.,vol.133,p.106292,nov.2019,doi:10.1016/j.ymssp.2019.106292.)所述,文献中利用一种基于深度递归神经网络(rnn)的非线性结构冲击负载识别方法,通过大量的动态响应和冲击载荷进行训练,学习结构输入和输出之间的复杂逆映射关系,得到弹引多体系统动力学状态信息。
6、但是上述方法仍然存在一定的局限性。首先,这种基于数据的方法需要大量的数据集来进行训练,在数据样本有限的情况下其效果可能不好;其次,虽然硬件计算能力相比之前有巨大提升,但是当前嵌入式的计算能力和功耗仍然存在不可调和的矛盾,如果采取结构复杂的大型卷积神经网络cnn类别和transform类型网络,对于实时性要求很高的嵌入式系统是不太现实的。
7、总之,现有技术存在的问题是:多体系统动力学状态重构方法推理速度不够快,准确度低,计算效率低。
技术实现思路
1、本发明的目的在于提供一种基于模型辅助网络的弹引多体系统动力学状态重构方法,推理速度更快,准确度高,计算效率高。
2、实现本发明目的的技术解决方案为:
3、一种基于模型辅助网络的弹引多体系统动力学状态重构方法,包括如下步骤:
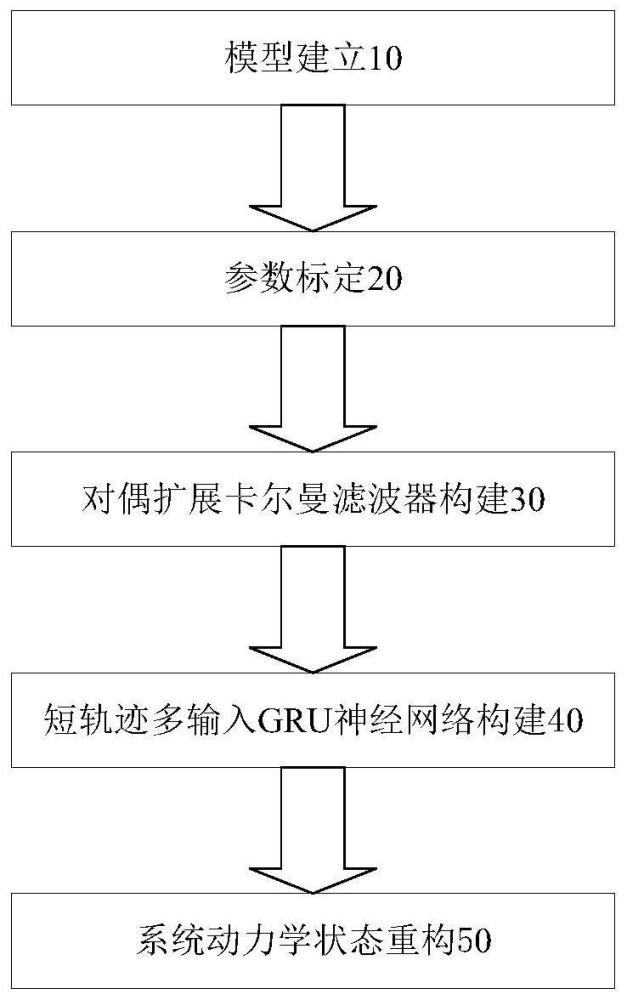
4、(10)模型建立:采用多体系统动力学方法,建立弹引多体系统模型;
5、(20)参数标定:利用有限元方法,对所述弹引多体系统模型进行谐响应分析,得到连接关系参数,所述连接关系参数包括弹引多体系统的等效刚度系数和等效阻尼系数;
6、(30)对偶扩展卡尔曼滤波器构建:根据连接关系参数,构建基于最小二乘法对偶卡尔曼滤波器;
7、(40)短轨迹多输入gru神经网络构建:基于gru类型神经网络结构,构建并训练得到成熟的短轨迹多输入gru神经网络;
8、(50)系统动力学状态重构:以原始传感器数据和卡尔曼滤波器的输出数据作为所述成熟的短轨迹多输入gru神经网络的输入,从其输出得到所述弹引多体系统的动力学重构信号。
9、本发明与现有技术相比,其显著优点在于:
10、1、推理速度更快:本发明采用模型辅助网络作为多体系统动力学新的状态重构方法,能够从初始数据和模型数据中学习到输入输出映射关系,推理速度更快。
11、2、准确度高:本发明在模型部分,通过基于最小二乘法的对偶卡尔曼滤波器(dlekf)进行状态重构,能够实现系统状态和模型参数同时估计,在系统参数标定的前提下进行数据修正和状态重构,保证模型的估计结果。并且能够扩展状态重构数据的维度,进一步表征不可测构件的信息。
12、3、计算效率高:本发明在网络部分,采用短轨迹多输入的gru(gated recurrentunit,门控循环单元)神经网络,能够实现将传感器数据和基于模型的重构数据共同作为输入的映射方法。虽然扩展了输入的维度,但是减少了输入的数据,增加了计算的效率。
技术特征:1.一种基于模型辅助网络的弹引多体系统动力学状态重构方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的动力学状态重构方法,其特征在于,所述(10)模型建立步骤具体为:
3.根据权利要求2所述的动力学状态重构方法,其特征在于,所述(30)对偶扩展卡尔曼滤波器构建步骤包括:
4.根据权利要求3所述的动力学状态重构方法,其特征在于,所述(40)短轨迹多输入gru神经网络构建步骤包括:
技术总结本发明公开一种基于模型辅助网络的弹引多体系统动力学状态重构方法,推理速度更快,准确度高,计算效率高。其包括如下步骤:(10)模型建立:采用多体系统动力学方法,建立弹引多体系统模型;(20)参数标定:利用有限元方法,对所述弹引多体系统模型进行谐响应分析,得到连接关系参数;(30)对偶扩展卡尔曼滤波器构建:根据连接关系参数,基于最小二乘法构建对偶卡尔曼滤波器;(40)短轨迹多输入GRU神经网络构建:基于GRU类型神经网络结构,构建并训练得到成熟的短轨迹多输入GRU神经网络;(50)系统动力学状态重构:从成熟的短轨迹多输入GRU神经网络输出得到弹引多体系统的动力学重构信号。技术研发人员:戴可人,陈炳炀,马翔,蔚达,张合受保护的技术使用者:南京理工大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/197203.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。