基于工业设备的动态数据处理方法及系统与流程
- 国知局
- 2024-07-31 23:27:14
本发明涉及数据处理领域,尤其涉及一种基于工业设备的动态数据处理方法及系统。
背景技术:
1、随着工业自动化的发展,工业设备广泛应用于生产制造的各个领域,这些工业设备在长期运行过程中,会产生大量的动态运行数据,包括设备温度、振动、功耗等各种参数,这些动态数据包含了设备运行状态的重要信息,能够反映设备的健康状况和运行趋势,传统的数据处理方法通常依赖于人工分析和经验判断,往往存在着对工业设备的运行状态分析效率低、准确性差的问题,为了满足现代工业设备智能化管理的需求,急需一种智能化的工业设备动态数据处理方法。
技术实现思路
1、本发明为解决上述技术问题,提出了一种基于工业设备的动态数据处理方法及系统,以解决至少一个上述技术问题。
2、为实现上述目的,本发明提供一种基于工业设备的动态数据处理方法,包括以下步骤:
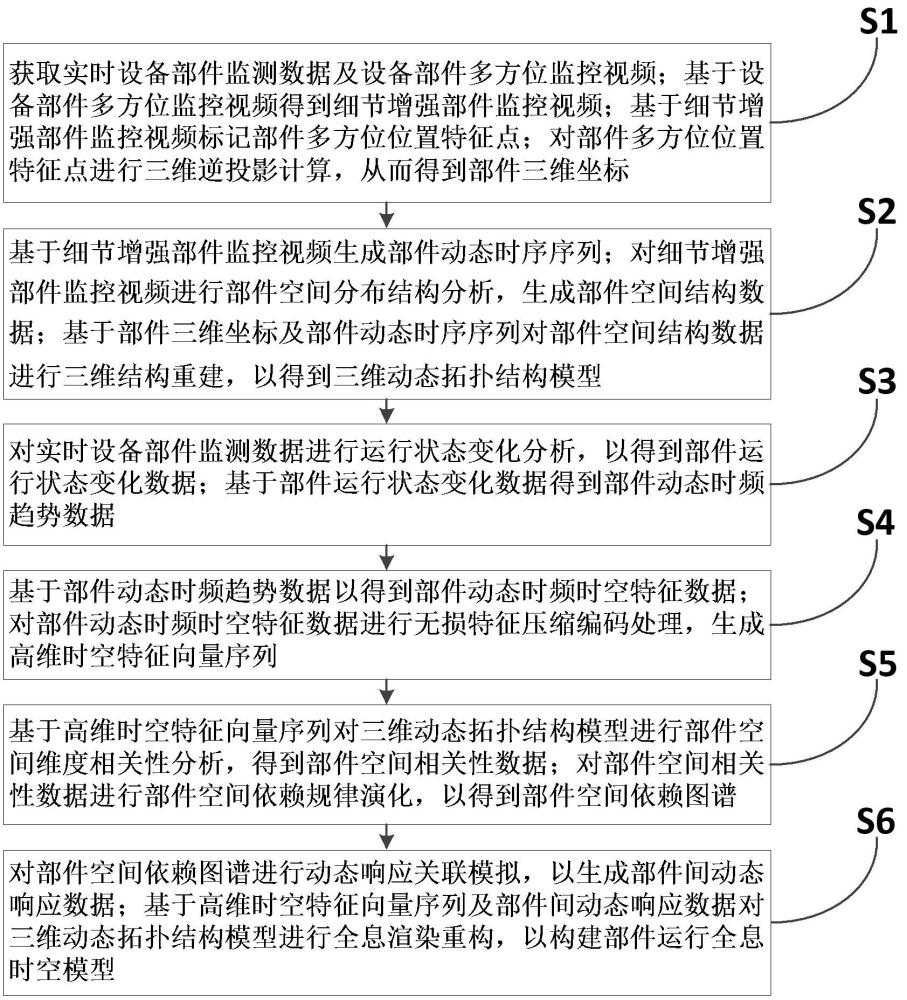
3、步骤s1:获取实时设备部件监测数据及设备部件多方位监控视频;基于设备部件多方位监控视频得到细节增强部件监控视频;基于细节增强部件监控视频标记部件多方位位置特征点;对部件多方位位置特征点进行三维逆投影计算,从而得到部件三维坐标;
4、步骤s2:基于细节增强部件监控视频生成部件动态时序序列;对细节增强部件监控视频进行部件空间分布结构分析,生成部件空间结构数据;基于部件三维坐标及部件动态时序序列对部件空间结构数据进行三维结构重建,以得到三维动态拓扑结构模型;
5、步骤s3:对实时设备部件监测数据进行运行状态变化分析,以得到部件运行状态变化数据;基于部件运行状态变化数据得到部件动态时频趋势数据;
6、步骤s4:基于部件动态时频趋势数据以得到部件动态时频时空特征数据;对部件动态时频时空特征数据进行无损特征压缩编码处理,生成高维时空特征向量序列;
7、步骤s5:基于高维时空特征向量序列对三维动态拓扑结构模型进行部件空间维度相关性分析,得到部件空间相关性数据;对部件空间相关性数据进行部件空间依赖规律演化,以得到部件空间依赖图谱;
8、步骤s6:对部件空间依赖图谱进行动态响应关联模拟,以生成部件间动态响应数据;基于高维时空特征向量序列及部件间动态响应数据对三维动态拓扑结构模型进行全息渲染重构,以构建部件运行全息时空模型。
9、本发明通过获取实时设备部件监测数据和多方位监控视频,全面了解设备的状态和运行情况,细节增强部件监控视频提高图像质量,增强部件细节,进一步提高监测和分析的准确性,标记部件多方位位置特征点帮助建立部件的空间关系,为后续的分析和处理提供基础,通过三维逆投影计算,将部件的二维图像信息转换为三维坐标,实现对部件位置的准确定位和空间信息的获取,通过生成部件动态时序序列,捕捉部件的运动和变化情况,为后续的分析提供时间维度的信息,部件空间分布结构分析揭示部件之间的关联和排布方式,为后续的结构分析和故障诊断提供基础,通过部件三维坐标和动态时序序列,进行三维结构重建,建立起部件之间的空间拓扑关系,从而得到三维动态拓扑结构模型,运行状态变化分析识别和记录部件的状态变化,包括温度、振动等参数的变化,提供运行状态的时序数据,部件动态时频趋势数据揭示部件在时间和频率上的变化规律,帮助发现潜在的异常和故障迹象,基于部件动态时频趋势数据,提取出部件的时频时空特征,包括频域特征、时域特征等,用于描述部件的动态变化过程,通过无损特征压缩编码处理,将复杂的时空特征数据进行降维和压缩,生成高维时空特征向量序列,减少数据存储和处理的开销,基于高维时空特征向量序列对三维动态拓扑结构模型进行部件空间维度相关性分析,揭示部件之间的相互作用和依赖关系,帮助理解设备系统的整体运行情况,部件空间相关性数据提供部件之间关联程度的量化指标,为进一步的分析和决策提供依据,通过部件空间依赖规律演化,推断部件之间的规律性变化和趋势,帮助预测和预防潜在故障和问题,通过对部件空间依赖图谱进行动态响应关联模拟,模拟和预测部件之间的相互影响和传播效应,帮助判断系统的稳定性和故障传播路径,基于高维时空特征向量序列及部件间动态响应数据,对三维动态拓扑结构模型进行全息渲染重构,将多维数据转换为可视化的模型,提供对部件运行状态的直观认识和分析。
10、优选地,步骤s1包括以下步骤:
11、步骤s11:获取实时设备部件监测数据及设备部件多方位监控视频;
12、步骤s12:对设备部件多方位监控视频进行图像细节增强处理,以得到细节增强部件视频;
13、步骤s13:对细节增强部件视频进行逐帧视觉特征识别,标记部件多方位位置特征点;
14、步骤s14:对部件多方位位置特征点进行像素坐标计算,得到部件像素坐标;
15、步骤s15:基于部件像素坐标对设备部件多方位监控视频进行三维逆投影计算,从而得到部件三维坐标。
16、本发明通过实时设备部件监测数据提供了设备状态和参数的即时信息,包括温度、压力、振动等监测指标,帮助了解设备的实时运行情况,设备部件多方位监控视频提供全方位的视角和观察视野,捕捉设备部件的外观和动态变化,为后续的分析提供详细的视觉信息,图像细节增强处理改善视频的图像质量,提高部件细节的可见性和清晰度,使得后续的分析和决策更加准确和可靠,逐帧视觉特征识别提取视频中的关键特征,如边缘、纹理等,用于部件的定位和识别,标记部件多方位位置特征点在视频中准确定位部件的位置,为后续的三维坐标计算提供基础,像素坐标计算将部件多方位位置特征点转换为视频图像的像素坐标,确定部件在图像中的位置和区域,通过三维逆投影计算,将部件在视频中的像素坐标转换为三维坐标,实现对部件的空间定位,得到部件的三维坐标后,准确地确定部件在设备中的位置和空间关系,为后续的分析和决策提供基础。
17、优选地,步骤s15包括以下步骤:
18、基于部件像素坐标构建部件像素坐标系;
19、根据部件多方位位置特征点对部件像素坐标系进行控制点标记,得到部件控制点坐标系;
20、基于部件控制点坐标系对设备部件多方位监控视频进行多像素点三角逆投影拟合,以得到部件控制点初始三维坐标值;
21、对设备部件多方位监控视频进行三维姿态估算,以得到部件三维姿态方位参数;
22、利用部件三维姿态方位参数对部件控制点初始三维坐标值进行畸变参数优化,从而得到部件三维坐标。
23、本发明通过基于部件像素坐标构建部件像素坐标系建立一个相对于设备部件的参考坐标系,用于后续的三维坐标计算和姿态估算,通过对部件多方位位置特征点进行控制点标记,确定部件像素坐标系中的关键点,用于控制和参考后续的三维坐标计算和姿态估算,通过多像素点三角逆投影拟合,将部件控制点在像素坐标系中的位置转换为初始的三维坐标值,提供了部件初始的空间位置信息,三维姿态估算分析设备部件在不同视角下的姿态变化,包括旋转、倾斜等参数,提供了部件在空间中的方位信息,通过利用部件三维姿态方位参数进行畸变参数优化,提高部件控制点初始三维坐标值的准确性和精度,得到更精确的部件三维坐标信息。
24、优选地,步骤s2的具体步骤为:
25、步骤s21:对细节增强部件监控视频进行部件动态时序分析,以得到部件动态位置姿态数据;
26、步骤s22:对部件动态位置姿态数据进行序列化处理,生成部件动态时序序列;
27、步骤s23:对细节增强部件监控视频进行部件空间分布结构分析,生成部件空间结构数据;
28、步骤s24:基于部件三维坐标对部件空间结构数据进行三维结构重建,构建部件三维结构模型;
29、步骤s25:基于部件动态时序序列对部件三维结构模型进行动态拓扑关联演化,以得到三维动态拓扑结构模型。
30、本发明通过细节增强部件监控视频的时序分析提取出部件在时间上的动态变化信息,包括位置和姿态的演变,为后续的分析和决策提供时间维度的参考,序列化处理将部件动态位置姿态数据转换为时序序列,将每个时间点的位置和姿态信息逐步记录下来,方便后续的时序分析和模型构建,部件空间分布结构分析揭示部件之间的空间关系和结构特征,包括部件之间的距离、相对位置等信息,为后续的结构重建和拓扑关联提供基础,基于部件三维坐标进行三维结构重建将部件空间结构数据转换为具体的三维空间模型,恢复出部件在三维空间中的准确形态和位置关系,基于部件动态时序序列进行动态拓扑关联演化分析部件之间的关联和演化规律,揭示部件在时间上的拓扑结构变化,为设备状态分析和故障诊断提供更深入的理解。
31、优选地,步骤s25包括以下步骤:
32、对部件动态时序序列进行时序动态轨迹拟合,得到部件时序动态轨迹;
33、对部件动态时序序列进行时序窗口分割,以得到运行时序窗口;
34、通过运行时序窗口对部件动态时序序列进行设备运行阶段性识别,以得到部件运行阶段窗口数据;
35、基于部件运行阶段窗口数据对部件时序动态轨迹进行动态演化趋势分析,以得到部件动态阶段演化数据;
36、利用部件动态阶段演化数据对部件三维结构模型进行动态拓扑关联演化,以得到三维动态拓扑结构模型。
37、本发明通过时序动态轨迹拟合,将部件动态时序序列转换为连续的轨迹数据,反映了部件在时间上的运动轨迹和变化趋势,时序窗口分割将部件动态时序序列划分为多个连续的时间窗口,使得每个窗口内的数据具有连续性和一定的时间相干性,方便后续的运行阶段识别和分析,通过设备运行阶段性识别,将部件动态时序序列划分为不同的运行阶段,将每个阶段的数据集中在对应的时间窗口中,有助于对不同运行阶段进行独立分析和建模,动态演化趋势分析揭示部件在不同运行阶段的演化规律和趋势变化,包括位置、姿态、速度等参数,为了解部件的动态行为和性能提供详细信息,基于部件动态阶段演化数据进行动态拓扑关联演化分析部件在不同运行阶段下的拓扑结构变化,包括组件之间的连接、拆卸、添加等关系演化,提供了设备在时间上的拓扑结构演化信息。
38、优选地,步骤s3的具体步骤为:
39、步骤s31:对实时设备部件监测数据进行运行状态变化分析,以得到部件运行状态变化数据;
40、步骤s32:对部件运行状态变化数据进行时频特征分析,生成部件运行时频特征数据;
41、步骤s33:对部件运行时频特征数据进行动态变化趋势分析,得到部件动态时频趋势数据。
42、本发明通过实时设备部件监测数据的运行状态变化分析检测和识别部件的运行状态变化,例如故障、异常或正常工作状态的转变,提供了对设备运行状况的实时监测和评估,时频特征分析将部件运行状态变化数据转化为时域和频域特征,例如振动频率、幅度变化等,反映了部件在时间和频率上的运行特征,为后续的分析和建模提供了更丰富的特征信息,动态变化趋势分析研究部件运行时频特征数据的演化趋势,包括频率、振幅、能量等特征的变化趋势,提供了部件在时间上的动态特征变化信息,有助于发现异常情况、评估运行状态和进行故障预测。
43、优选地,步骤s4的具体步骤为:
44、步骤s41:对部件动态时频趋势数据进行深度时空特征提取,以得到部件动态时频时空特征数据;
45、步骤s42:对部件动态时频时空特征数据进行无损特征压缩编码处理,以得到低维潜在特征向量;
46、步骤s43:对低维潜在特征向量进行逐层卷积解码,生成高维特征样本;
47、步骤s44:对高维特征样本进行均方误差重构,生成高维时空特征向量序列。
48、本发明通过深度时空特征提取从部件动态时频趋势数据中提取出更高层次的时空特征,结合了时域、频域和空域的信息,能够捕捉到更丰富和复杂的部件动态特征,有助于提升数据表达的能力和分类准确性,无损特征压缩编码处理能够将高维的时频时空特征数据转换为低维潜在特征向量,减少了数据的维度和存储空间需求,并且保持了原始特征的重要信息,有助于提高数据处理的效率和降低计算成本,逐层卷积解码通过逆向的卷积过程,将低维潜在特征向量逐步还原为高维特征样本,恢复了数据的维度和详细信息,有助于还原被压缩的特征数据,为后续的分析和可视化提供更多详细信息,均方误差重构通过计算重构的高维特征样本与原始数据之间的均方误差,评估特征重构的精度和准确性,确保重构的时空特征向量序列与原始数据尽接近,从而保留了原始数据的重要特征和时空关系。
49、优选地,步骤s5的具体步骤为:
50、步骤s51:对高维时空特征向量序列进行空间分布特征分析,生成特征向量空间分布数据;
51、步骤s52:基于特征向量空间分布数据对三维动态拓扑结构模型进行部件空间维度相关性分析,得到部件空间相关性数据;
52、步骤s53:对部件空间相关性数据进行多层空间卷积处理,以生成空间相关卷积图;
53、步骤s54:对空间相关卷积图进行部件空间依赖规律演化,以得到部件空间依赖图谱。
54、本发明通过空间分布特征分析将高维时空特征向量序列在空间维度上进行分析,探索特征向量在不同部件或位置上的分布情况,揭示不同部件之间的空间关系和特征分布的规律,为后续的空间相关性分析提供基础,部件空间维度相关性分析通过对特征向量空间分布数据进行研究,探索不同部件之间的相关性和依赖关系,识别出部件之间的空间关联性,了解它们在空间维度上的相互作用和影响,为建立动态拓扑结构模型提供关键信息,多层空间卷积处理通过在部件空间相关性数据上进行卷积操作,捕捉到不同尺度下的空间相关性特征,例如局部关联和全局关联等,生成空间相关卷积图能够有效地表达部件之间的空间依赖关系,并提供更全面的空间特征信息,部件空间依赖规律演化将空间相关卷积图进一步分析和演化,揭示部件之间的空间依赖规律和演化趋势,构建部件空间依赖图谱,描述不同部件之间的关联程度和演化模式,为设备状态评估、故障诊断和预测提供重要参考。
55、优选地,步骤s6的具体步骤为:
56、步骤s61:对部件空间依赖图谱进行动态响应关联模拟,以生成部件间动态响应数据;
57、步骤s62:对高维时空特征向量序列及部件间动态响应数据进行多尺度全局特征融合,以得到部件全局时空特征数据;
58、步骤s63:利用部件全局时空特征数据对三维动态拓扑结构模型进行全息渲染重构,以构建部件运行全息时空模型。
59、本发明通过动态响应关联模拟基于部件空间依赖图谱,模拟和预测不同部件之间的动态响应关系,生成部件间的动态响应数据。这些数据反映了部件之间的相互作用和传递效应,有助于理解和预测工业设备在运行过程中的响应行为和动态演化。多尺度全局特征融合将高维时空特征向量序列与部件间动态响应数据进行融合处理,综合考虑了多个尺度的特征信息。有效地整合局部特征和全局特征,提取部件的全局时空特征数据,为后续的部件运行全息时空模型构建提供更全面和综合的特征表达。全息渲染重构利用部件全局时空特征数据对三维动态拓扑结构模型进行重构,将部件的时空特征信息可视化为全息时空模型。直观地展示部件之间的运行状态和相互关系,帮助工程师和操作人员快速理解设备的运行情况,发现潜在的问题和异常,并进行实时监控和决策。
60、在本说明书中,提供一种基于工业设备的动态数据处理系统,用于执行如上所述的基于工业设备的动态数据处理方法,包括:
61、三维坐标模块,用于获取实时设备部件监测数据及设备部件多方位监控视频;基于设备部件多方位监控视频得到细节增强部件监控视频;基于细节增强部件监控视频标记部件多方位位置特征点;对部件多方位位置特征点进行三维逆投影计算,从而得到部件三维坐标;
62、三维拓扑结构模块,用于基于细节增强部件监控视频生成部件动态时序序列;对细节增强部件监控视频进行部件空间分布结构分析,生成部件空间结构数据;基于部件三维坐标及部件动态时序序列对部件空间结构数据进行三维结构重建,以得到三维动态拓扑结构模型;
63、动态时频模块,用于对实时设备部件监测数据进行运行状态变化分析,以得到部件运行状态变化数据;基于部件运行状态变化数据得到部件动态时频趋势数据;
64、无损压缩编码模块,用于基于部件动态时频趋势数据以得到部件动态时频时空特征数据;对部件动态时频时空特征数据进行无损特征压缩编码处理,生成高维时空特征向量序列;
65、空间依赖模块,用于基于高维时空特征向量序列对三维动态拓扑结构模型进行部件空间维度相关性分析,得到部件空间相关性数据;对部件空间相关性数据进行部件空间依赖规律演化,以得到部件空间依赖图谱;
66、全息渲染模块,用于对部件空间依赖图谱进行动态响应关联模拟,以生成部件间动态响应数据;基于高维时空特征向量序列及部件间动态响应数据对三维动态拓扑结构模型进行全息渲染重构,以构建部件运行全息时空模型。
67、本发明通过实时设备部件监测数据和多方位监控视频提供了对设备运行状态和部件细节的全面监测,细节增强部件监控视频提高了部件细节的可视化效果,有助于更准确地分析和识别设备部件的状态,标记部件多方位位置特征点和计算部件三维坐标提供了设备部件在空间中的精确定位,为后续的部件空间结构分析和三维拓扑结构模型构建提供基础,部件动态时序序列提供了对设备部件运行状态和轨迹演化的详细描述,有助于了解设备的运行趋势和异常变化,部件空间结构数据提供了设备部件在空间中的分布和连接关系信息,为后续的部件空间依赖分析和全息渲染提供基础,三维动态拓扑结构模型通过结合部件的三维坐标和动态时序序列,能够更全面地揭示设备部件之间的关系和演化规律,部件运行状态变化数据提供了对设备部件运行状态的详细描述,有助于及时发现异常和故障,部件动态时频趋势数据能够揭示设备部件的运行规律和周期性变化,有助于预测设备的维护需求和优化措施,部件动态时频时空特征数据提供了更丰富和详细的设备部件特征信息,有助于更准确地描述设备的运行状态和特性,无损压缩编码处理能够降低数据的存储和传输成本,提高数据的效率和可用性,部件空间相关性数据提供了设备部件之间的空间关系和相互作用信息,有助于理解设备的整体结构和部件之间的协同效应,部件空间依赖图谱能够直观地展示设备部件之间的依赖关系和演化规律,为设备的优化和改进提供参考,基于构建的部件运行全息时空模型,识别部件间的关键依赖关系,并预测潜在的故障风险,为设备预防性维护提供了可靠的支撑,该方法还能够根据部件实时状态和预测趋势,自动优化关键资源的动态调配,确保设备的稳定高效运行。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197661.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表