一种视网膜静脉注射系统的滑模控制方法
- 国知局
- 2024-07-31 23:40:36
本发明属于眼科机器人,具体涉及一种视网膜静脉注射系统的滑模控制方法。
背景技术:
1、视网膜静脉阻塞严重威胁病人的视力,其表现为视网膜静脉的血管狭窄及血栓形成,导致眼底出血甚至失明。由于视网膜解剖结构的复杂性,以及对医生操作要求的高精度性,限制了视网膜手术在临床上的推广实践。近年来,视网膜静脉注射技术作为一种直接的临床手术方式,通过外科医生将溶栓药物注射到完全或不完全闭塞的视网膜静脉中以溶解血栓,这有望尽快恢复视网膜静脉中的血液流通,以减少失明的威胁。
2、但是,目前视网膜静脉注射手术中,通常将注射机构与玻切机的粘性流体控制单元连接,采用固定压强进行药物注射。由于无流量反馈能力,药物流体注入视网膜静脉内的过程是不可控的,可能会对静脉造成冲击并导致损伤。因此,现亟需一种基于流量反馈的注射系统闭环控制方法,在视网膜静脉注射过程中确保精确跟踪期望流量,减少手术风险。
技术实现思路
1、本发明针对现有技术的不足,提供了一种用于视网膜静脉注射手术的滑模控制方法。
2、本发明通过以下技术方案实现:
3、一种视网膜静脉注射系统的滑模控制方法,包括:
4、针对视网膜静脉注射系统构建二阶动力学模型,确定注射系统的输入变量及输出变量;
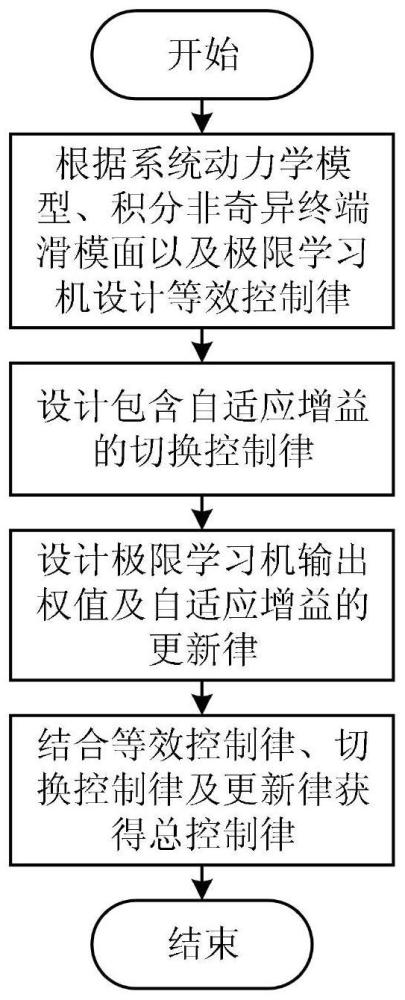
5、采用积分非奇异终端滑模面设计控制律,包括基于该滑模面和极限学习机设计的等效控制律,采用自适应增益设计的切换控制律,结合等效控制律、切换控制律和更新律获得总控制律来控制视网膜静脉注射系统构建二阶动力学模型中的输入变量;
6、针对极限学习机设计了隐层神经元的自进化机制,实现隐层神经元的增加或删减过程;该机制包括两个过程的评价指标、触发条件及权重调整,通过该机制可以实现控制过程中极限学习机隐层结构的调整,以适应控制过程中的不确定性。
7、进一步,所述视网膜静脉注射系统构建二阶动力学模型,确定注射系统的输入变量及输出变量过程如下:
8、注射系统采用电机驱动的活塞p1来推动硅油,通过硅油推动注射器活塞p2,最终将药物注射到视网膜静脉腔内;
9、活塞p1推动硅油流动的过程一阶动力学描述如下:
10、
11、其中q1和分别表示硅油流量及其一阶导数,v1表示活塞p1的速度,d1表示该过程的未建模扰动,a1、b1、和k1分别为正参数;
12、注射器活塞p2的速度v2与硅油流量q1的关系为:
13、q1=sv2+d0
14、其中s为注射器活塞的面积,d0表示建模不确定性;
15、由注射器活塞p2驱动的药物流量动力学可描述为:
16、
17、其中q2和分别表示药物流量及其一阶导数,v2表示活塞p2的速度,d2表示该过程的未建模扰动,a2、b2、和k2分别为正参数;
18、根据上述三个公式获得视网膜静脉注射系统的二阶动力学模型:
19、
20、其中为药物流量的二阶导数,d为整个系统的不确定性,为d2的一阶导数;
21、选取状态变量u=v1作为控制输入,则二阶动力学模型重写为:
22、
23、由上式可知,通过设计闭环控制器控制驱动电机推动的速度来对药物流量进行控制。
24、进一步,所述积分非奇异终端滑模面表示为:
25、
26、上式中eq=x1-xd为跟踪误差,λ1,λ2,γ1和γ2为正参数,其中γ1∈(0,1),sign(·)为符号函数,τ为积分变量。
27、进一步,采用极限学习机来估计系统的不确定性:
28、
29、其中为极限学习机的输出系统不确定性的估计值,为极限学习机的输入,qd和分别表示跟踪误差的一阶导数、期望流量、期望流量的一阶导数,h(z)为隐层输出,为输出权值。
30、进一步,所述等效控制律ueq为:
31、
32、其中为期望流量的二阶导数。
33、进一步,所述切换控制律usw:
34、
35、其中为自适应增益,k1为正参数。
36、进一步,自适应增益及极限学习机输出权重的更新律分别为:
37、
38、
39、其中αk、γ和αβ分别为正参数。
40、进一步,注射系统的总控制律u为:
41、u=ueq+usw
42、式中ueq为等效控制律,usw为切换控制律。
43、进一步,所述增加机制具体为:
44、定义第i个时间窗内的平均绝对误差(mae)指标:
45、
46、其中nt为时间窗δt长度内的数据量,δt为采样间隔,eq(t)为t时刻的跟踪误差,设定mae(0)=0,mae(1)=eq(0);
47、增加机制的触发条件为:
48、
49、其中ε1和ε2分别为正参数;
50、当满足该触发条件时,则增加一个隐层神经元,并根据下式进行权重的更新:
51、
52、
53、其中为新增加的输入权重分量,wg取为-1到1之间的随机数,为新增加的输出权重分量。
54、进一步,所述删减机制具体为:
55、定义第j个隐层神经元的重要性指标:
56、
57、其中βj和βk分别表示(i-1)×δt时刻下第j个和第k个隐层神经元的输出权值,uj和ul分别表示在时间窗δt内第j个和第l个隐层神经元的输出向量,ρ(uj,ul)表示第j个和第l个隐层神经元的输出向量之间的皮尔森相关系数,皮尔森相关系数的取值范围为0到1;
58、删减机制的触发条件为:
59、
60、其中μξ和σξ分别表示第i个时间窗内由nh个隐层神经元构成的重要性向量的均值及标准差;
61、当满足该触发条件时,则将第j个神经元删减,并根据下式进行权重的更新:
62、wj=0
63、
64、其中wj表示与第j个隐层神经元连接的输入权值向量,βj表示第j个隐层神经元的输出权值,即表示第js个神经元是与第j个神经元输出向量的皮尔森相关系数最大的神经元,和分别表示第js个神经元更新前后的输出权值,hj和hjs分别表示第j个神经元和第js个神经元在触发删减条件时的隐层输出。
65、相对于现有技术,本发明具有的有益效果为:
66、本发明针对于视网膜静脉注射机器人系统中的控制器部分,提出了一种基于自适应自进化极限学习机的非奇异终端滑模控制器。在该滑模控制器中,基于动力学建模设计等效控制律。采用极限学习机来估计不确定性,结合自适应增益来补偿极限学习机的估计误差。为了获得更紧凑的极限学习机结构,还设计了一种自进化机制来实现极限学习机隐层神经元的自动增加或删减。将等效控制律结合切换控制律获得总控制律,实现期望流量的跟踪功能。本发明能够保证视网膜静脉注射手术中药物流量的高精度闭环控制,具有良好的自适应能力。
67、本发明提供的视网膜静脉注射系统滑模控制方法,可以通过流量反馈实时根据设定的期望流量进行药物流量控制,改善了压强驱动下开环控制过程的注射过程不平稳的缺点,提高注射过程中药物流量的跟踪精度。同时具有良好的自适应能力,有效地提高了控制过程中的鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198038.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表