一种无人机的定位系统及方法与流程
- 国知局
- 2024-07-31 23:48:20
本发明涉及无人机定位领域,具体的是一种无人机的定位系统及方法。
背景技术:
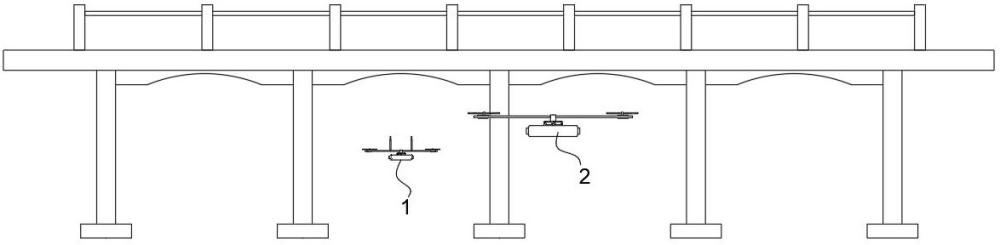
1、在无人机技术领域中,精确定位是确保无人机安全、高效执行任务的关键,然而,当无人机在特定环境下(如桥底)作业时,即通过无人机拍摄桥梁底部架构以及表面情况,由于桥面较宽且存在其他建筑或其他障碍物的遮挡,会导致其无法直接接收到全球定位系统(gps)或其他传统定位技术的精确信号,故此无人机移动至桥底时并无法知晓其所在精确位置,导致在控制无人机飞行至桥梁底部,对桥梁下端面进行观察时,容易因为视野较差的问题,导致无人机飞行超出原本行程,撞击桥梁顶端,造成无人机以及拍摄设备的损坏。
技术实现思路
1、本发明提供了一种无人机的定位系统及方法,其克服了背景技术中所描述的不足。
2、本发明解决其技术问题的所采用的技术方案是:
3、一种无人机的定位系统,所述定位系统包括距离探测模块、监测模块、处理模块,距离探测模块设于第二无人机内,而监测模块设置于第一无人机内,第二无人机用于接收gps信号,而第一无人机用于移动至桥梁底部并对桥梁底部进行监测,所述距离探测模块与监测模块均与处理模块信号连接;
4、所述距离探测模块包括安装于第一无人机上的第一uwb测距模块和第二无人机上的三轴云台相机、第二uwb测距模块,所述第一uwb测距模块与第二uwb测距模块信号连接,
5、当第一无人机与第二无人机均在作业时,通过第一uwb测距模块与第二uwb测距模块之间相互检测来获得第一无人机与第二无人机之间的直线间距。
6、所述第一无人机包括架体、第一电机、机臂、第二电机,第一电机安装在架体内,第一电机的输出轴贯穿过架体,且第一电机的输出轴上安装有一个衔接件,而机臂呈环形阵列状固定在衔接件外,每个机臂的末端均安装有一个第二电机,而第二电机的输出轴上安装有叶片;
7、所述架体表面设有一导轨,而每个机臂上均套设有一个滑动件,而每个滑动件的上端均安装有抵杆,当第一无人机飞行至桥梁下方并向上升起靠近桥梁时,抵杆的上端会与桥梁下端面相抵。
8、一较佳技术方案,所述衔接件上方设置有一个监测组件,监测组件包括支撑板体、离心电机、第一弹簧支撑条、摄像机,第一弹簧支撑条环形阵列于支撑板体的下端,支撑板体通过第一弹簧支撑条与各个滑动件相连,而摄像机与离心电机分别设于支撑板体的上下两端,所述摄像机的拍摄镜头垂直向上设置;
9、所述第一弹簧支撑条为弧形轮廓,且由橡胶材质制成。
10、一较佳技术方案,所述离心电机通过第二弹簧支撑条与第一弹簧固定在支撑板体下端,而第二弹簧支撑条为橡胶材质且呈弧形轮廓,并且第一弹簧设于第二弹簧支撑条外。
11、一较佳技术方案,所述滑动件包括滑块、活动管、第三弹簧、杆体,第三弹簧套设在杆体外,而活动管对称安装于第三弹簧的上下两端,且位于上端的活动管与滑块相连,且杆体的上下两端均不与两个活动管相连。
12、一较佳技术方案,所述抵杆包括套管、活动管、第二弹簧、橡胶块,所述活动管活动安装在套管内,而第二弹簧安装于套管内,且对活动管进行支撑;
13、所述橡胶块包裹在套管的上部,且突出于套管的上端,并同时包裹活动管,所述活动管的上端活动安装着一个滚珠,以通过滚珠与桥梁下端面相抵。
14、一种基于无人机的定位系统的定位方法,所述定位方法包括以下具体步骤:
15、s1:启动第一无人机与第二无人机进行工作,并通过终端控制第二无人机飞行至空旷上空,并接收信号再通过终端控制第一无人机飞行至需要监测、观察的桥梁底部;
16、s2:利用处理模块控制三轴云台相机朝向第一无人机所在大致方向,并利用三轴云台相机进行视觉特征识别第一无人机,让三轴云台相机调整至朝向第一无人机的准确方向、角度;
17、s3:读取三轴云台相机的姿态角度,获得第一无人机相对于第二无人机的方向角d和俯仰角p,并通过第一uwb测距模块与第二uwb测距模块之间的相互测量,获得第一无人机与第二无人机之间的直线间距d;
18、s3:随后在方向角d、俯仰角p、直线间距d的基础上,计算第一无人机所在位置,并将计算后得到的第一无人机精确位置发送至第一无人机以及控制第一无人机的终端;
19、步骤s3中,计算第一无人机所在位置的同时,先将方向角d和俯仰角p从角度分别转换为弧度drad、prad,计算式为:
20、
21、并通过gps定位第二无人机当前的位置的经度λb、纬度φb和高度hb,并将所述第一无人机与第二无人机之间的直线间距d转换为纬度差δφ、经度差δλ和高度差δh,计算式为:
22、
23、上述计算式中的r为地球半径;
24、再将第二无人机的经度λb、纬度φb和高度hb与计算得到的经度差δλ、纬度差δφ、高度差δh相加,得到第一无人机的经度λa、纬度φa和高度ha,以下为计算式:
25、
26、最终将计算得到的第一无人机经度λa、纬度φa和高度ha传输到第一无人机以及控制第一无人机的终端,完成第一无人机的定位。
27、本技术方案与现有技术相比,它具有如下优点:
28、本发明中的无人机定位系统是通过两架无人机来进行配合实现的,及控制第一无人机对桥梁底部进行检测,并通过第二无人机接收信号,且利用三轴云台相机对第一无人机进行视觉特征识别,并转动朝向第一无人机,计算并锁定第一无人机所在位置,再将位置信息发送给第一无人机,进行定位。
29、使用者在控制第一无人机在桥梁下飞行时,并无需特意控制第一无人机的具体精确飞行高度,只要让所有的抵杆均与桥梁底部相抵时,既可保持第一无人机的飞行平稳性,并通过衔接件的上设置的监测组件对桥梁下端表面、结构进行拍摄、监测,并且由于第一弹簧支撑条为弧形轮廓,且由橡胶材质制成,如此设置旨在通过离心电机在工作时所产生的震动来保持支撑板体的动态平衡,减少因第一无人机飞行时倾斜抵接桥梁底部而产生的摄像机抖动影响拍摄效果。
技术特征:1.一种无人机的定位系统,其特征在于,所述定位系统包括距离探测模块、监测模块、处理模块,距离探测模块设于第二无人机(2)内,而监测模块设置于第一无人机(1)内,第二无人机(2)用于接收gps信号,而第一无人机(1)用于移动至桥梁底部并对桥梁底部进行监测,所述距离探测模块与监测模块均与处理模块信号连接;
2.根据权利要求1所述的无人机的定位系统,其特征在于,所述第一无人机(1)包括架体(11)、第一电机(12)、机臂(13)、第二电机(14),第一电机(12)安装在架体(11)内,第一电机(12)的输出轴贯穿过架体(11),且第一电机(12)的输出轴上安装有一个衔接件(121),而机臂(13)呈环形阵列状固定在衔接件(121)外,每个机臂(13)的末端均安装有一个第二电机(14),而第二电机(14)的输出轴上安装有叶片(141);
3.根据权利要求2所述的无人机的定位系统,其特征在于,所述衔接件(121)上方设置有一个监测组件(15),监测组件(15)包括支撑板体(151)、离心电机(152)、第一弹簧支撑条(153)、摄像机(154),第一弹簧支撑条(153)环形阵列于支撑板体(151)的下端,支撑板体(151)通过第一弹簧支撑条(153)与各个滑动件(113)相连,而摄像机(154)与离心电机(152)分别设于支撑板体(151)的上下两端,所述摄像机(154)的拍摄镜头垂直向上设置;
4.根据权利要求3所述的无人机的定位系统,其特征在于,所述离心电机(152)通过第二弹簧支撑条(521)与第一弹簧(522)固定在支撑板体(151)下端,而第二弹簧支撑条(521)为橡胶材质且呈弧形轮廓,并且第一弹簧(522)设于第二弹簧支撑条(521)外。
5.根据权利要求2所述的无人机的定位系统,其特征在于,所述滑动件(113)包括滑块(1131)、活动管(1132)、第三弹簧(1133)、杆体(1134),第三弹簧(1133)套设在杆体(1134)外,而活动管(1132)对称安装于第三弹簧(1133)的上下两端,且位于上端的活动管(1132)与滑块(1131)相连,且杆体(1134)的上下两端均不与两个活动管(1132)相连。
6.根据权利要求5所述的无人机的定位系统,其特征在于,所述抵杆(112)包括套管(1121)、活动管(1122)、第二弹簧(1123)、橡胶块(1124),所述活动管(1122)活动安装在套管(1121)内,而第二弹簧(1123)安装于套管(1121)内,且对活动管(1122)进行支撑;
7.一种基于权利要求1-6任一所述无人机的定位系统的定位方法,其特征在于,所述定位方法包括以下具体步骤:
8.根据权利要求7所述的定位方法,其特征在于,步骤s3中,计算第一无人机(1)所在位置的同时,先将方向角d和俯仰角p从角度分别转换为弧度drad、prad,计算式为:
技术总结本发明涉及领域,公开了一种无人机的定位系统及方法,本发明中的无人机定位系统是通过两架无人机来进行配合实现的,及控制第一无人机对桥梁底部进行检测,并通过第二无人机接收信号,且利用三轴云台相机对第一无人机进行视觉特征识别,并转动朝向第一无人机,计算并锁定第一无人机所在位置,再将位置信息发送给第一无人机,进行定位。技术研发人员:谭戎,吴建东受保护的技术使用者:厦门天源欧瑞科技有限公司技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240730/198586.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表