一种机动平台下的目标跟踪方法及装置与流程
- 国知局
- 2024-07-31 23:53:19
本发明涉及飞行器测控,尤其涉及一种机动平台下的目标跟踪方法及装置。
背景技术:
1、随着卫星技术的不断进步和低轨互联网星座的密集发射和组网运营,未来中国在轨卫星的数量将持续增长。
2、随着在轨卫星数量的增加,卫星测控将变得尤为重要,特别是对于大型互联网星座。因此,发展能够同时对多个目标进行有效测控的技术变得至关重要。这不仅包括提高测控精度和效率,还涉及到对复杂星座的管理和协调。多目标测控技术尤其是基于机动平台的多目标测控技术,可以确保中国在轨卫星系统的稳定运行和最大化利用,从而在全球太空竞赛中保持领先地位。公开号为cn115200544a的中国发明专利申请《一种用于机动测控站目标跟踪的方法及装置》中通过获取测角数据、目标粗相关处理、目标精相关处理得到真实目标在大地坐标系下的方位角、俯仰角及目标检测的幅度值,并基于上述信息通过目标滤波预测处理得到目标在下一跟踪时刻的大地坐标系下的方位角和俯仰角,实现目标的正确持续跟踪,但该目标跟踪方法没有对跟踪目标时测控平台机动造成的稳定性影响进行特殊处理,其机动测控站的移动只适用于简单的直线地形,遇到道路曲折或崎岖时机动测控站的不稳定会导致其测控目标位置不准确,无法连续稳定跟踪,进而丢失目标,为了能够在机动平台上实现对不同目标的连续稳定跟踪,急需设计一种能够快速响应平台运动过程中姿态快速变化时的目标跟踪方法。
技术实现思路
1、本发明所要解决的技术问题在于如何实现快速响应平台运动过程中姿态快速变化时的目标跟踪。
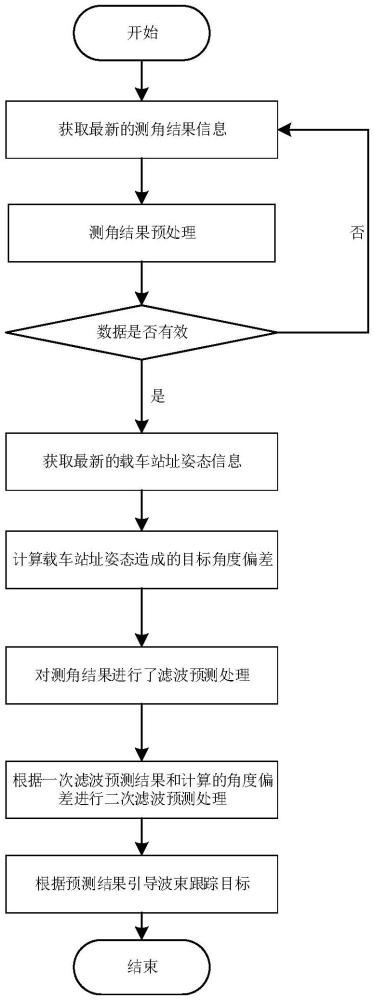
2、本发明是通过以下技术方案解决上述技术问题的:一种机动平台下的目标跟踪方法,包括以下步骤:
3、步骤1、基于机动式测控系统的空域覆盖能力,获取该空域的测角结果,所述测角结果包括:测角时间、测角信噪比、测角基准方位角、测角基准俯仰角、测角结果的方位角、测角结果的俯仰角、目标距离;
4、步骤2、对所述测角结果进行预处理,得到预处理后的测角数据;
5、步骤3、获取当前测角时刻的站址姿态信息,包括经度、纬度、高程、偏航角、俯仰角和横滚角;
6、步骤4、计算前后帧平台站址姿态角变化造成的角度偏差;
7、步骤5、对所述预处理后的测角数据进行目标一次滤波预测处理,得到一次滤波预测处理后的数据;
8、步骤6、将所述一次滤波预测处理后的数据和角度偏差作为新的观测值进行二次滤波预测处理,得到下一跟踪时刻滤波预测后的目标角度;
9、步骤7、利用二次滤波预测处理后的数据控制电波束指向目标,实现目标的连续稳定跟踪。
10、本发明的机动平台下的目标跟踪方法能够适应静止和机动等各类测控场景下,机动测控站获取该空域的测角数据后,通过测角数据的预处理和滤波器预测处理,获取平台坐标系下的目标角度信息,可以迅速的对目标轨道的变化进行迅速响应;通过前后帧站址姿态的变化计算角度偏差,结合一次滤波预测结果进行二次滤波,实现平台运动时目标角度平滑补偿,避免平台站址姿态大幅度改变时,单一滤波器响应不及时。通过测角结果的预处理、角度偏差补偿和平台坐标系下二次滤波处理,可以对由于平台运动造成的角度变化进行快速响应,实现了目标的稳定跟踪。
11、优选的,所述步骤2中对所述测角结果进行预处理包括对每帧的测角结果按照设定条件进行判断,剔除不满足设定条件的野值,所述设定条件为:
12、
13、式中,tn为当前测角结果的时间,an为当前测角结果的方位角,en为当前测角结果的俯仰角,snrn为当前测角结果的信噪比,an-1为测角基准方位角,en-1为测角基准俯仰角,tcurr为当前测角时刻,snrthreshold为设定的信噪比门限值,athreshold为设定的方位角变化门限值,ethreshold为设定的俯仰角变化门限值,amin为平台自身的最小方位角,amax为平台自身的最大方位角,emin为平台自身的最小俯仰角,emax为平台自身的最大俯仰角。
14、优选的,所述步骤3中当前测角时刻的站址姿态信息的计算公式为:
15、
16、式中,tcurr为当前测角时刻,θcurr为当前测角时刻的站址姿态信息,θn-1为最近惯导数据周期时刻tn-1获取的站址姿态信息,θn-2为上一周期tn-2获取的站址姿态信息。
17、优选的,所述步骤4中角度偏差的计算过程为:
18、正向转换:
19、
20、逆向转换:
21、
22、式中,an为当前测角结果的方位角,en为当前测角结果的俯仰角,rn为当前测角结果的距离信息,θcurr为当前测角时刻的站址姿态信息,θlast为上一测角时刻的站址姿态信息;为利用θcurr计算得到的平台坐标系到地心地固坐标系的转换矩阵,为利用θlast计算得到的地心地固坐标系到平台坐标系的转换矩阵,a′n、e′n和r′n分别为计算后的方位角、俯仰角和距离,由平台运动站址姿态角度变化造成的角度偏差为:
23、δan=an-a′n
24、δen=en-e′n。
25、优选的,所述步骤5包括:设当前方位角或俯仰角的测角结果为x(n),滤波后的预测值为上一帧的预测值为和分别表示当前预测速度、上一帧预测速度以及下一帧的速度值,二阶环路的平滑预测模型如下:
26、平滑方程:
27、
28、
29、预测方程:
30、
31、
32、优选的,所述步骤6包括:设输入的观测值为滤波后的预测值为得到:
33、平滑方程:
34、
35、
36、预测方程:
37、
38、
39、式中,δx为步骤4计算得到的角度偏差,下标*表示二次滤波的数值。
40、本发明还提供一种机动平台下的目标跟踪装置,所述装置包括:
41、数据获取模块,用于基于机动式测控系统的空域覆盖能力,获取该空域的测角结果,所述测角结果包括:测角时间、测角信噪比、测角基准方位角、测角基准俯仰角、测角结果的方位角、测角结果的俯仰角、目标距离;
42、数据预处理模块,用于对所述测角结果进行预处理,得到预处理后的测角数据;
43、站址姿态信息获取模块,用于获取当前测角时刻的站址姿态信息,包括经度、纬度、高程、偏航角、俯仰角和横滚角;
44、角度偏差计算模块,用于计算前后帧平台站址姿态角变化造成的角度偏差;
45、一次滤波预测处理模块,用于对所述预处理后的测角数据进行目标一次滤波预测处理,得到一次滤波预测处理后的数据;
46、二次滤波预测处理模块,用于将所述一次滤波预测处理后的数据和角度偏差作为新的观测值进行二次滤波预测处理,得到下一跟踪时刻滤波预测后的目标角度;
47、引导模块,用于利用二次滤波预测处理后的数据控制电波束指向目标,实现目标的连续稳定跟踪。
48、优选的,所述数据预处理模块中对所述测角结果进行预处理包括对每帧的测角结果按照设定条件进行判断,剔除不满足设定条件的野值,设定条件为:
49、
50、式中,tn为当前测角结果的时间,an为当前测角结果的方位角,en为当前测角结果的俯仰角,snrn为当前测角结果的信噪比,an-1为测角基准方位角,en-1为测角基准俯仰角,tcurr为当前测角时刻,snrthreshold为设定的信噪比门限值,athreshold为设定的方位角变化门限值,ethreshold为设定的俯仰角变化门限值,amin为平台自身的最小方位角,amax为平台自身的最大方位角,emin为平台自身的最小俯仰角,emax为平台自身的最大俯仰角。
51、优选的,所述角度偏差计算模块中角度偏差的计算过程为:
52、正向转换:
53、
54、逆向转换:
55、
56、式中,an为当前测角结果的方位角,en为当前测角结果的俯仰角,rn为当前测角结果的距离信息,θcurr为当前测角时刻的站址姿态信息,θlast为上一测角时刻的站址姿态信息;为利用θcurr计算得到的平台坐标系到地心地固坐标系的转换矩阵,为利用θlast计算得到的地心地固坐标系到平台坐标系的转换矩阵,a′n、e′n和r′n分别为计算后的方位角、俯仰角和距离,由平台运动站址姿态角度变化造成的角度偏差为:
57、δan=an-a′n
58、δen=en-e′n。
59、优选的,所述一次滤波预测处理模块的处理过程包括:设当前方位角或俯仰角的测角结果为x(n),滤波后的预测值为上一帧的预测值为和分别表示当前预测速度、上一帧预测速度以及下一帧的速度值,二阶环路的平滑预测模型如下:
60、平滑方程:
61、
62、
63、预测方程:
64、
65、
66、本发明提供的优点在于:
67、1、本发明的机动平台下的目标跟踪方法能够适应静止和机动等各类测控场景下,机动测控站获取该空域的测角数据后,通过测角数据的预处理和滤波器预测处理,获取平台坐标系下的目标角度信息,可以迅速的对目标轨道的变化进行迅速响应;通过前后帧站址姿态的变化计算角度偏差,结合一次滤波预测结果进行二次滤波,实现平台运动时目标角度平滑补偿,避免平台站址姿态大幅度改变时,单一滤波器响应不及时。通过测角结果的预处理、角度偏差补偿和平台坐标系下二次滤波处理,可以对由于平台运动造成的角度变化进行快速响应,实现了目标的稳定跟踪。
68、2、本发明在机动平台上实现对不同目标的连续稳定跟踪,根据平台自身的姿态和站址信息以及目标的空间位置,完成多个波束指向的灵活调度,能够满足各类应急测控和卫星在轨管理的任务需要,是未来地面测控站建设的重要方向。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199001.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。