一种基于隐马尔可夫模型的刀位点与刀轨段在线匹配方法
- 国知局
- 2024-07-31 23:54:44
本发明属于智能制造数控加工技术,尤其涉及一种基于隐马尔可夫模型的刀位点与刀轨段在线匹配方法。
背景技术:
1、在数控加工过程中,通过实时采集刀具的真实位置,能够分析加工过程中材料去除率、加工误差等时序变化,从而进一步对工艺参数优化调整提供指导。但由于机床振动、控制误差等因素的存在,刀具的真实位置往往与理论刀轨段存在偏差,需要判断出刀具在哪段轨迹上运动,才能正确评估加工误差等信息。
2、现有技术中,公开号为cn107145126a的中国发明专利公开了一种考虑误差区域性分布的数控加工刀轨分区映射方法,能够将理论刀轨与工件实际形状进行映射,但其侧重于优化加工刀轨信息,同时没有利用到真实加工刀位点数据。公开号为cn104615083a的中国发明专利公开了一种基于刀位点修改的曲面刀轨轮廓误差补偿方法,该方法在辨识加工进给轴控制系统伺服增益的基础上,根据随动误差模型和直线插补加工代码,离线估计实际加工点;利用理想刀轨“累加弦长参数三次样条”近似的方法估计轮廓误差矢量;再利用轮廓误差矢量在各轴的分量计算轮廓误差补偿值,得到补偿后刀位点,进而生成补偿后直线插补数控加工代码,用于实际加工,但并未考虑刀具运动历史信息构成的影响。
3、综上,考虑到加工过程中刀具移动的时序特性,即刀具在加工过程中沿着刀轨段顺序进行移动,不会出现逆向或跳过的情况,加工过程可以被建模为一个隐马尔可夫过程。其中观测值为存在偏差的刀具真实位置,状态值为刀具所在的理论刀轨段。因此,本发明提供一种基于隐马尔可夫模型的刀位点与刀轨段在线匹配方法。
技术实现思路
1、基于现有技术中的不足,本发明考虑到加工过程中刀具移动的时序特性,即刀具在加工过程中沿着刀轨段顺序进行移动,不会出现逆向或跳过的情况,将加工过程建模为一个隐马尔可夫过程,其中观测值为存在偏差的刀具真实位置,状态值为刀具所在的理论刀轨段,由此提出一种基于隐马尔可夫模型的刀位点与刀轨段在线匹配方法,通过建立加工中刀具运动过程的hmm,能够综合考虑刀具当前位置与历史运动信息,推理计算出真实刀位点与理论刀轨段的对应匹配。
2、本发明的技术方案具体如下:
3、一种基于隐马尔可夫模型的刀位点与刀轨段在线匹配方法,包括以下步骤:
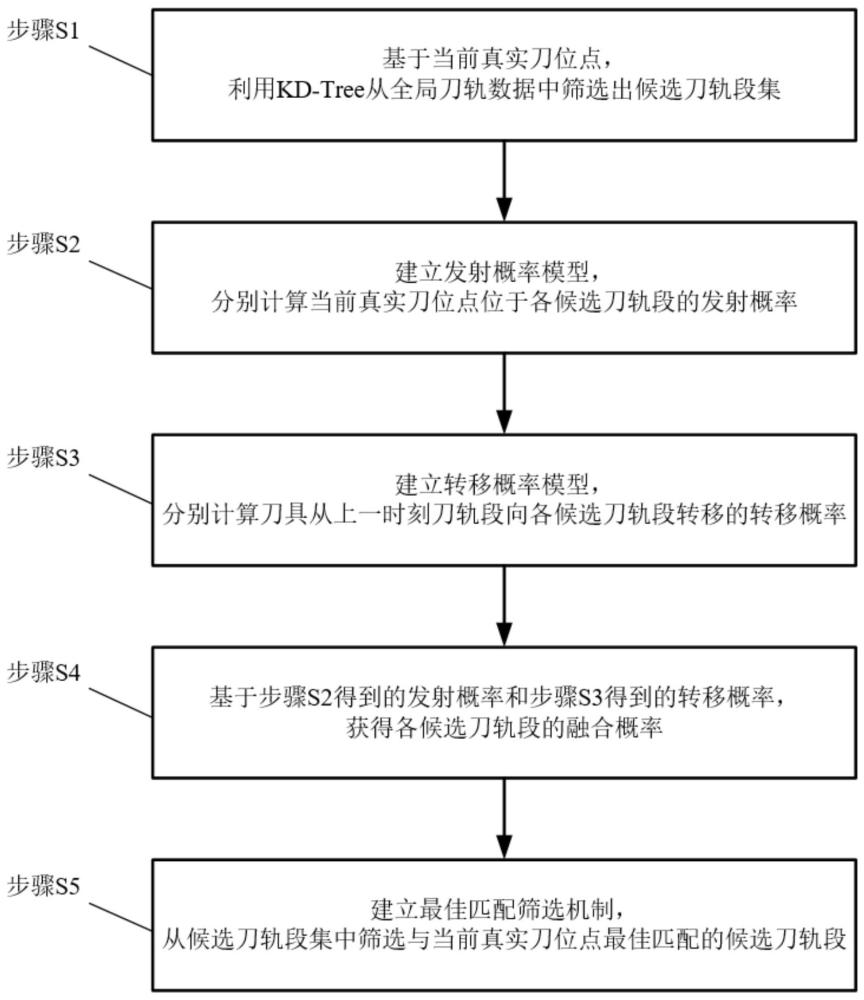
4、步骤s1:基于当前真实刀位点,利用kd-tree从全局刀轨数据中筛选出候选刀轨段集;
5、步骤s2:建立发射概率模型,分别计算当前真实刀位点位于各候选刀轨段的发射概率;
6、步骤s3:建立转移概率模型,分别计算刀具从上一时刻刀轨段向各候选刀轨段转移的转移概率;
7、步骤s4:基于步骤s2得到的发射概率和步骤s3得到的转移概率,获得各候选刀轨段的融合概率;
8、步骤s5:建立最佳匹配筛选机制,从候选刀轨段集中筛选出与当前真实刀位点最佳匹配的候选刀轨段。
9、优选的,所述步骤s1具体包括:
10、步骤s1-1:建立全局刀轨数据的二维矩阵,所述二维矩阵中的每行分别为刀轨段端点的空间x、y、z坐标,对所有刀轨段进行索引标记,建立刀轨段端点的kd-tree;
11、步骤s1-2:利用kd-tree,查找出与当前真实刀位点距离小于设定阈值的刀轨段端点,将其所在的刀轨段作为候选刀轨段,存入候选刀轨段集中。
12、优选的,所述步骤s2具体包括:
13、步骤s2-1:建立发射概率模型,其表达式如下:
14、
15、其中,表示 t时刻真实刀位点位于索引为 j的刀轨段上的发射概率,表示刀具位置误差的标准差,表示 t时刻真实刀位点到索引为 j的刀轨段的距离;
16、步骤s2-2:遍历所述候选刀轨段集,利用所述发射概率模型计算当前真实刀位点位于各候选刀轨段的发射概率。
17、优选的,所述步骤s2-1中的计算方式为:若到的投影落在内部,则为与投影点间的距离;若到的投影落在外部,则为的两个刀轨段端点中与更近的刀轨段端点与的距离。
18、优选的,所述步骤s3具体包括:
19、步骤s3-1:建立转移概率模型,其表达式如下:
20、
21、其中, i代表 t-1时刻真实刀位点所匹配刀轨段的索引值,表示刀具从到的转移概率,为指数分布的尺度参数 ,表示刀具在 t-1时刻与 t时刻间的真实移动距离,表示刀具从到转移的理论轨迹长度,为修正系数;
22、步骤s3-2:遍历所述候选刀轨段集,利用所述转移概率模型计算刀具从 t-1时刻向各候选刀轨段转移的转移概率。
23、优选的,所述步骤s3-1中的计算方式为:由向做垂线,垂足为,由向做垂线,垂足为,与间的刀轨段长度之和即为。
24、优选的,所述步骤s4具体包括:
25、步骤s4-1:基于所述发射概率和所述转移概率,计算得到各候选刀轨段的融合概率, 计算公式如下:
26、
27、
28、其中,表示是正确匹配结果的融合概率,表示发射概率的权重,表示转移概率的权重;
29、步骤s4-2:建立融合概率矩阵,融合概率矩阵中包含每条候选刀轨段的索引值、发射概率、转移概率以及融合概率。
30、优选的,所述步骤s5具体包括:通过预设的筛选规则,从融合概率矩阵中筛选出最佳匹配的候选刀轨段,并输出其索引值。
31、优选的,所述筛选规则为:
32、规则一、将融合概率矩阵中发射概率和转换概率均为最大值的候选刀轨段作为最佳匹配的候选刀轨段;
33、规则二、若不满足规则一,则将融合概率为最大值的最大的候选刀轨段作为最佳匹配的候选刀轨段。
34、相比于现有技术,本发明的有益效果在于:
35、(1)本发明提出的一种基于隐马尔可夫模型的刀位点与刀轨段在线匹配方法,利用hmm进行刀轨匹配预测,能够将刀具在加工过程中的运动历史信息引入推理计算中,提升刀位点与刀轨段匹配结果的准确率。
36、(2)本发明提出的一种基于隐马尔可夫模型的刀位点与刀轨段在线匹配方法,设计了刀位点发射概率模型,利用高斯分布模型,能够通过刀位点与刀轨段间的距离,计算出刀具位于某段刀轨上的概率大小。
37、(3本发明提出的一种基于隐马尔可夫模型的刀位点与刀轨段在线匹配方法,设计了刀轨段的转移换概率模型,能够评估在相邻两个时刻,刀具位置在两段刀轨间进行转换的概率大小。
38、(4)本发明提出的一种基于隐马尔可夫模型的刀位点与刀轨段在线匹配方法,通过建立融合概率评估机制,综合比较发射概率与转换概率,并建立筛选排序机制,从候选刀轨段中识别出当前时刻刀位点的最优匹配刀轨段。
39、(5)本发明提出的一种基于隐马尔可夫模型的刀位点与刀轨段在线匹配方法,将导航机制引入刀具加工运动过程中,综合考虑真实刀具位置和刀具运动历史信息,实现了每一时刻刀具的最优匹配结果推理计算,同时算法输出无滞后,能够满足在线匹配的需求。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199134.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表