一种基于图像处理的无人机降落方法与流程
- 国知局
- 2024-07-31 23:56:12
本发明涉及无人机降落,特别涉及一种基于图像处理的无人机降落方法。
背景技术:
1、近年来,随着无人机的发展逐渐成熟,无人机被广泛应用到电力巡检、地震救灾、交通监测、军事侦察等领域,而降落过程是无人机容易发生事故的一个阶段,因此需对无人机降落过程的安全性进行研究,同时,由于无人机一般采用gps或北斗定位作为降落技术,而定位精度往往是米级,不能精准地降落到目标降落点,因此还需对无人机降落过程的精准性进行研究。
2、现有技术中,专利公开号为cn110059701a的《一种基于不良光照下的无人机地标图像处理方法》通过当图像评估为过度曝光时,即采用图像亮度自适应算法进行亮度抑制;当图像评估为曝光不足时,即采用图像低照度算法进行亮度补偿,解决了不良光照下,设定的阈值参数无法匹配不同亮度的问题,且该方法运行时间短,符合无人机实时性的要求,提高了无人机降落的精准度。
3、无人机的降落过程中,路径上如果存在输电线、树枝等障碍物,会对降落安全产生影响,然而,上述现有技术只考虑了不同亮度下的无人机地标图像处理,而未对降落过程中的障碍物因素进行研究,无人机降落的安全性较低;此外,当无人机位于过高或过低的高度时,容易产生无法识别出地标的情况,上述现有技术也未考虑对该问题进行解决,无人机降落的精准性较低。
技术实现思路
1、本发明提供了一种基于图像处理的无人机降落方法,用以解决现有技术中没有比较可靠的针对无人机降落的安全性和精准性较低的问题。
2、一方面,本发明提供了一种基于图像处理的无人机降落方法,包括以下步骤:
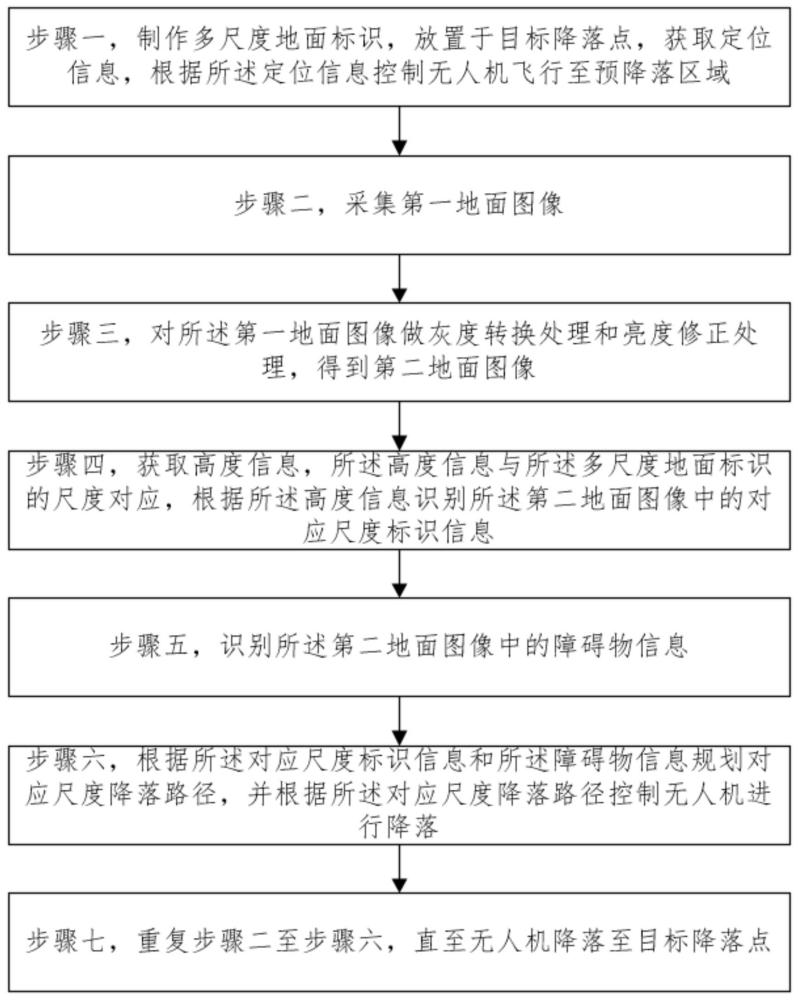
3、步骤一,制作多尺度地面标识,放置于目标降落点,获取定位信息,根据所述定位信息控制无人机飞行至预降落区域。
4、步骤二,采集第一地面图像。
5、步骤三,对所述第一地面图像做灰度转换处理和亮度修正处理,得到第二地面图像。
6、步骤四,获取高度信息,所述高度信息与所述多尺度地面标识的尺度对应,根据所述高度信息识别所述第二地面图像中的对应尺度标识信息。
7、步骤五,识别所述第二地面图像中的障碍物信息。
8、步骤六,根据所述对应尺度标识信息和所述障碍物信息规划对应尺度降落路径,并根据所述对应尺度降落路径控制无人机进行降落。
9、步骤七,重复步骤二至步骤六,直至无人机降落至目标降落点。
10、在一种可能的实现方式中,步骤一中,所述多尺度地面标识包括若干个不同尺度的地面标识,所有尺度的地面标识均具有同一个中心点,每个尺度的地面标识采用多边形、圆形、二维码中的一种或多种。
11、在一种可能的实现方式中,步骤一中,相邻尺度的地面标识颜色不同。
12、在一种可能的实现方式中,步骤二中,所述第一地面图像包括若干张垂直向下拍摄的图像。
13、在一种可能的实现方式中,步骤三中,所述亮度修正处理包括:对所述第一地面图像做亮度评估,去除所述第一地面图像中亮度差异最大的两张图像;对剩余图像中亮度评估高于预设范围的图像做亮度抑制处理,对剩余图像中亮度评估低于预设范围的图像做亮度补偿处理。
14、在一种可能的实现方式中,步骤四中,所述根据所述高度信息识别所述第二地面图像中的对应尺度标识信息包括:
15、对所述第二地面图像进行轮廓识别,得到轮廓识别数据。
16、根据所述高度信息对所述轮廓识别数据进行对应尺度标识匹配,得到对应尺度标识信息。
17、在一种可能的实现方式中,步骤四还包括:
18、在目标降落点设置图像传感器和图像处理器,所述图像传感器获取上方图像。
19、当根据所述高度信息对所述轮廓识别数据进行对应尺度标识匹配,没有识别出对应尺度标识信息时,所述图像处理器识别所述上方图像中的无人机位姿信息。
20、根据所述无人机位姿信息得到所述对应尺度标识信息。
21、在一种可能的实现方式中,步骤五包括:
22、采用卷积神经网络识别所述第二地面图像中的障碍物信息。
23、在一种可能的实现方式中,步骤五还包括:
24、当没有识别出障碍物信息时,所述图像处理器识别所述上方图像中的第二障碍物信息。
25、根据所述第二障碍物信息得到所述障碍物信息。
26、在一种可能的实现方式中,步骤六包括:
27、采用避障算法根据所述对应尺度标识信息和所述障碍物信息规划对应尺度降落路径,并根据所述对应尺度降落路径控制无人机进行降落。
28、本发明中的一种基于图像处理的无人机降落方法,具有以下优点:
29、通过制作多尺度地面标识,放置于目标降落点,根据高度信息识别第二地面图像中的对应尺度标识信息,识别第二地面图像中的障碍物信息,根据对应尺度标识信息和障碍物信息规划对应尺度降落路径,提高了无人机降落的安全性和精准性;提出的在目标降落点设置图像传感器和图像处理器,图像传感器获取上方图像,图像处理器识别上方图像中的无人机位姿信息,图像处理器还识别上方图像中的第二障碍物信息,降低了识别失败风险,提高了安全性;提出的采用卷积神经网络识别第二地面图像中的障碍物信息,提高了识别准确率;提出的采用避障算法根据对应尺度标识信息和障碍物信息规划对应尺度降落路径,提高了路径规划合理性。
技术特征:1.一种基于图像处理的无人机降落方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于图像处理的无人机降落方法,其特征在于,步骤一中,所述多尺度地面标识包括若干个不同尺度的地面标识,所有尺度的地面标识均具有同一个中心点,每个尺度的地面标识采用多边形、圆形、二维码中的一种或多种。
3.根据权利要求2所述的一种基于图像处理的无人机降落方法,其特征在于,步骤一中,相邻尺度的地面标识颜色不同。
4.根据权利要求1所述的一种基于图像处理的无人机降落方法,其特征在于,步骤二中,所述第一地面图像包括若干张垂直向下拍摄的图像。
5.根据权利要求4所述的一种基于图像处理的无人机降落方法,其特征在于,步骤三中,所述亮度修正处理包括:对所述第一地面图像做亮度评估,去除所述第一地面图像中亮度差异最大的两张图像;对剩余图像中亮度评估高于预设范围的图像做亮度抑制处理,对剩余图像中亮度评估低于预设范围的图像做亮度补偿处理。
6.根据权利要求1所述的一种基于图像处理的无人机降落方法,其特征在于,步骤四中,所述根据所述高度信息识别所述第二地面图像中的对应尺度标识信息包括:
7.根据权利要求6所述的一种基于图像处理的无人机降落方法,其特征在于,步骤四还包括:
8.根据权利要求7所述的一种基于图像处理的无人机降落方法,其特征在于,步骤五包括:
9.根据权利要求8所述的一种基于图像处理的无人机降落方法,其特征在于,步骤五还包括:
10.根据权利要求1所述的一种基于图像处理的无人机降落方法,其特征在于,步骤六包括:
技术总结本发明公开了一种基于图像处理的无人机降落方法,包括以下步骤:制作多尺度地面标识,获取定位信息,控制无人机飞行至预降落区域;采集第一地面图像;对第一地面图像做灰度转换处理和亮度修正处理,得到第二地面图像;获取高度信息,根据高度信息识别第二地面图像中的对应尺度标识信息;识别第二地面图像中的障碍物信息;规划对应尺度降落路径,并控制无人机进行降落;重复步骤二至步骤六,直至无人机降落至目标降落点。本申请通过制作多尺度标识,根据高度信息识别对应尺度标识信息,识别障碍物信息,规划对应尺度降落路径,提高了无人机降落的安全性和精准性。技术研发人员:赵永峰,马晓青,张虎,魏嵬,王辉受保护的技术使用者:西安猎隼航空科技有限公司技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240730/199260.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表