一种基于边界信息的改进RRT路径规划方法
- 国知局
- 2024-07-31 23:57:37
本发明涉及智能机器人路径规划,具体涉及一种基于边界信息的改进rrt路径规划方法。
背景技术:
1、近年来,全球新一轮科技和产业革命的蓬勃发展,我国机器人产业发展势头迅猛,产业规模与市场空间不断扩大。近年来在政策扶持和产业需求的推动下,其应用场景正在从传统工业制造领域向室内服务、养老助残、辅助医疗等领域扩展,为了让普通群众感受人工智能技术为生活带来便利,顺应人民对美好生活的向往,需要更加智能,便捷多功能性的服务型机器人,协助人类完成各种任务和服务。
2、机器人是融合机械、电子、计算机、控制、人工智能等多领域技术交叉的装备,特别是移动机器人,由于其具有结构简单、控制方便、模型易建、承重大、自重轻、行走速度快等特点,在人类生产生活各领域得到广泛应用。移动机器人指一类可以通过自身传感器探知外界环境,实现在复杂环境中连续自主行驶的智能机器人,其涉及到信息感知、运动规划、自主控制等学科领域,是人工智能技术和计算机信息科学的最新成果。路径规划是移动机器人完成各种功能的基础,具备路径规划能力的移动机器人才真正具备实用性。机器人路径规划是在已知自身位置和目标点或者目标区域的条件下,在机器人运动空间寻找一条能够无碰撞抵达目标点或者区域的线路。路径规划能够极大地扩展移动机器人工作空间,提高移动机器人的实际应用价值。
3、rrt因其简单、非周期性的数据存储结构,更适合于单向查询规划,且在复杂的动态环境下也能表现出较好的性能。然而rrt算法随机采样的特性使规划路线远离最优,此外,这也使得算法每次规划出的路径不尽相同,鲁棒性差。迄今为止,许多研究者已经将rrt应用于许多领域,并做出了一系列改进:卡拉曼[4]提出了一种基于采样的最优运动规划的算法rrt*。然而,由于rrt*算法在找到初始路径之后须反复对现有结果进行优化,使得算法难以收敛,导致效率低下。palmieri等人提出了一种基于rrt的使用任意角度路径偏置的运动规划算法。任意角度搜索作为一种离散搜索技术,可以用来找到一条近似最优的路径,但其性能在不同的环境下有很大的差异。jordan和perez在2013年提出了基于多树搜索的双向搜索算法(bi-rrt*),该算法通过在起始点和目标点并行生成两棵搜索树来提高节点的扩展效率和算法的收敛速度,但是该算法由于无法避免配置空间中大量无效采样导致搜索时间过长。gammell和srinivasa在2014年提出了informed-rrt*算法,该算法的先进性在于引入的状态子集能够对采样空间进行优化,并且最终可以获得最优路径,但是该算法搜索时间依然较长。
4、基础的rrt算法是利用随机采样和树的生长的思想,首先在地图中确定起始位置,随机采样生成一个点xrand;其次,在已有的树中找到一个距离xrand最近的结点作为xnear;最后,通过xrand和xnear之间以一定步长连接生成xnew,由此连接得到一条树的枝干,通过迭代上述步骤去不断生长树直到达到目标,规划出一条可行性路线;但是,该算法进行了许多无效的结点采样,从而降低了搜索效率且使得规划出的路径非最优且不固定。
5、针对以上问题,一种更加优化的改进rrt算法亟待提出,用以更加快速地找到全局最优路径。
技术实现思路
1、针对现有技术中存在的问题,本发明提供一种基于边界信息的改进rrt路径规划方法,在基于快速拓展随机树(rrt)方法的基础上引入边界信息探索法的思想,实现更快的探索时间和更短的路径。
2、为了实现上述目的,本发明采用的技术方案如下:
3、一种基于边界信息的改进rrt路径规划方法,包括以下步骤:
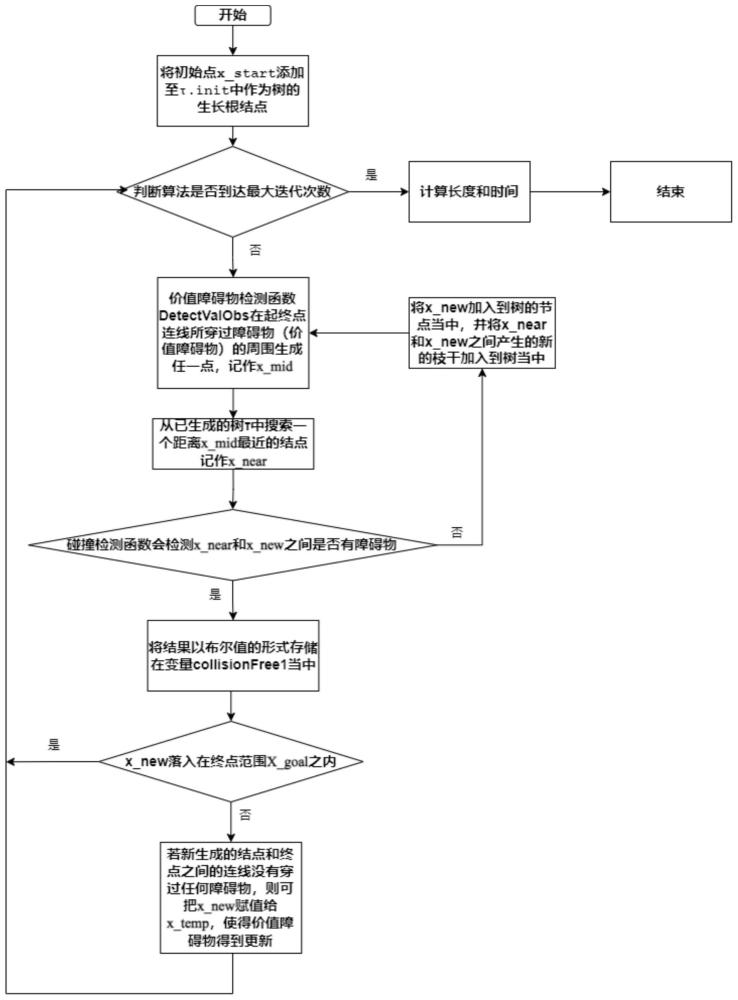
4、1)首先将初始点xstart添加至τ.init中作为树的生长根结点,设置迭代次数i的值为0,并将价值障碍物检测函数detectvalobs的探索点xtemp设置为起点xstart;
5、2)定义collisionfree1,collisionfree2两个布尔变量用以记录碰撞检测函数checkcollision(xnear,xnew)的返回值;
6、3)最大迭代次数maxiteration被事先设定,若算法在规定的最大迭代次数中未能找到可行路径,将会结束进程。在迭代次数之内,价值障碍物检测函数detectvalobs会在起终点连线所穿过障碍物(价值障碍物)的周围生成任一点,记作xmid;
7、4)临近结点函数nearneighbor会从已生成的树τ中搜索一个距离xmid最近的结点记作xnear。此时再以特定的步长沿xmid向xnear生长以产生新的结点xnew;
8、5)碰撞检测函数checkcollision会检测xnear和新生成的结点xnew之间是否有障碍物,并将结果以布尔值的形式存储在变量collisionfree1当中;
9、6)若collisionfree1返回的结果为true,则将xnew加入到树的节点当中,并将xnear和xnew之间产生的新的枝干加入到树当中;
10、7)若xnew落入在终点范围xgoal之内,则可结束搜索,完成路径规划任务。若新生成的结点和终点之间的连线没有穿过任何障碍物,则可把xnew赋值给xtemp,使得价值障碍物得到更新;
11、8)判断是否到达最大迭代次数;
12、9)如果没有到达则继续返回步骤3)进行迭代,如果到达最大迭代次数则计算规划时间和路径长度。
13、进一步,所述步骤3)中,detctvalobs在首轮循环中检测位于起点xstart和终点xgoal之间的障碍物;所生成的xmid是位于障碍物边缘离xstart最近的一点算法会生成多个点作为xmid的备选点,其个数取决于障碍物的形状,在遇到三角形障碍物时,算法会生成三个点作为xmid的备选点,而遇到四边形时则生成四个备选点;在生成的备选点中随机选择一个点作为xmid。
14、再进一步,所述步骤7)中,在把xnew赋值给xtemp之后,倘若xnew和xgoal之间没有障碍物,则把随机点xmid设置为xgoal,使障碍物得到更新,加快算法收敛。
15、本发明有益效果是:
16、1)通过将起终点之间的障碍物设定为有价值障碍物并在该障碍物周围进行采样,从而很大程度上避免了无效采样点的生成,进而提升了机器人的路径规划效率;
17、2)针对普通全局优化算法的动态避障效果差,在现实环境的适用场景有限的问题,本方法引入可动态升级的价值障碍物检测函数,通过对路径规划过程中出现的障碍物进行实时检测更新,进而可以使服务机器人在真实场景中具备更好的局部避障效果。
技术特征:1.一种基于边界信息的改进rrt路径规划方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的一种基于边界信息的改进rrt路径规划方法,其特征在于,所述步骤3)中,detectvalobs在首轮循环中检测位于起点xstart和终点xgoal之间的障碍物,所生成的xmid是位于障碍物边缘离xstart最近的一点;算法将生成多个点作为xmid的备选点,其个数取决于障碍物的形状,在遇到三角形障碍物时,算法将生成三个点作为xmid的备选点,而遇到四边形时则生成四个备选点;在生成的备选点中随机选择一个点作为xmid。
3.根据权利要求1或2所述的一种基于边界信息的改进rrt路径规划方法,其特征在于,所述步骤7)中,在把xnew赋值给xtemp之后,倘若xnew和xgoal之间没有障碍物,则把随机点xmid设置为xgoal,使障碍物得到更新,加快算法收敛。
技术总结一种基于边界信息的改进RRT路径规划方法,属于智能机器人路径规划技术领域;在基于快速拓展随机树(RRT)方法的基础上引入边界信息探索法,通过将起终点之间的障碍物设定为有价值障碍物并在该障碍物周围进行采样,从而很大程度上避免了无效采样点的生成,进而提升了算法效率;本发明解决了复杂环境下路径规划时间长,路径不优的问题。对本发明所提的方法进行了仿真实验,证实了该方法的优越性,具有很强的实用价值。技术研发人员:刘安东,梁昭成,路忠沅,朱华中,倪洪杰受保护的技术使用者:浙江工业大学技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240730/199392.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表