基于无人机的脱硫塔内自主巡检及其控制方法和装置与流程
- 国知局
- 2024-08-01 00:08:42
本发明涉及无人机巡检,具体地,涉及一种基于无人机的脱硫塔内自主巡检控制方法、一种基于无人机的脱硫塔内自主巡检方法、一种基于无人机的脱硫塔内自主巡检控制装置、一种地面控制设备、一种计算机可读存储介质和一种基于无人机的脱硫塔内自主巡检系统。
背景技术:
1、在对火电站的巡检工作中,对火电脱硫吸收塔的巡检一直以来都是巡检工作中的重点与难点。火电脱硫吸收塔是一种用于去除火电厂烟气中的二氧化硫的设备,同时还可以处理废水和废渣,以达到环保要求。通过火电脱硫吸收塔的处理,火电厂的污染排放得到了有效控制,对改善环境质量具有重要意义。火电脱硫吸收塔是一个近似圆柱体的结构,其材料由碳钢制作而成,直径为15-20米,高度为40-50米,内部有喷淋层、浆液池、搅拌器等结构。每层喷淋层由一条主干道、若干条支干道以及连接在支干道上的数百个喷淋管和喷嘴构成。浆液通过喷淋管的分配达到均匀分布的每个喷嘴,由喷嘴喷出,与逆向流动的烟气充分接触,吸收烟气中的有害物质。在每年机组停运检修时,吸收塔需同步进行检修,检修时需要对内壁防腐层以及塔内其他结构进行检查。
2、传统的人工巡检需要逐步搭建数十米高的脚手架,通过人工攀爬的方式对待巡检区域进行人工检查,不仅耗费人力财力多、简易脚手架上的高空作业极易对检修人员造成人身安全隐患。然而脱硫塔内部密闭、黑暗、卫星信号拒止等环境特点导致现有依据卫星导航和视觉导航的巡检方式在塔内难以应用,为自主巡检设备的研发带来困难。
3、因此,如何提高脱硫塔内巡检的工作效率及巡检覆盖范围,同时降低风险和人力成本,是本领域技术人员亟需解决的技术问题。
技术实现思路
1、针对现有技术中脱硫塔内难以应用无人机实现自主巡检需求的技术问题,本发明提供了一种基于无人机的脱硫塔内自主巡检及其控制方法和装置,采用该方法能够实现火电脱硫塔的自主巡检工作,可以显著地提高脱硫塔的巡检效率,大幅降低巡检带来的经济损耗。
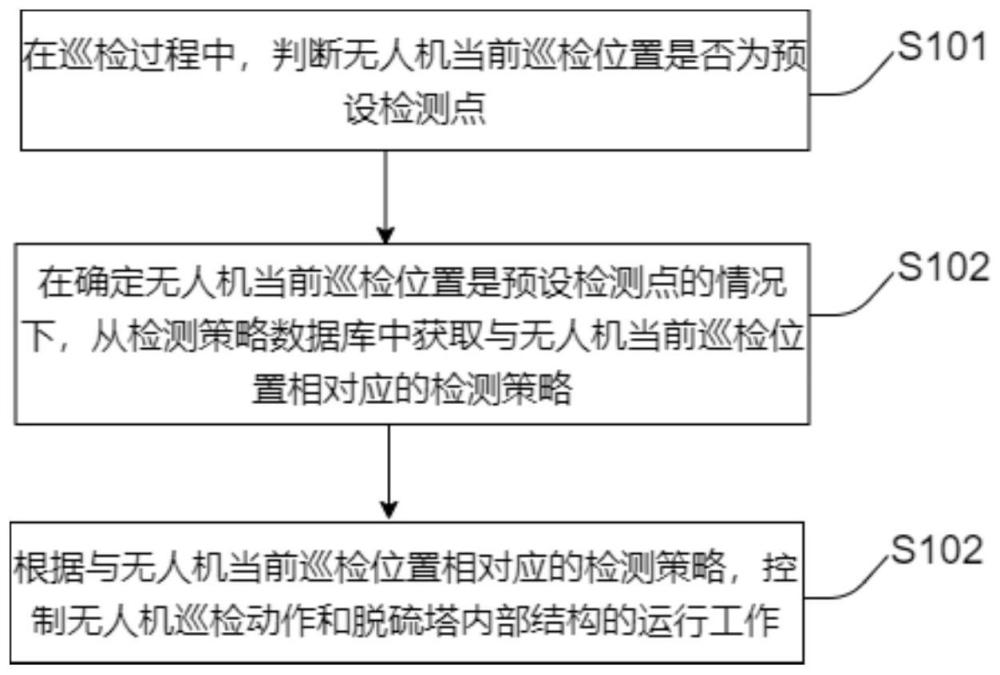
2、为实现上述目的,本发明第一方面提供了一种基于无人机的脱硫塔内自主巡检控制方法,该控制方法包括以下步骤:在巡检过程中,判断无人机当前巡检位置是否为预设检测点;在确定无人机当前巡检位置是预设检测点的情况下,从检测策略数据库中获取与无人机当前巡检位置相对应的检测策略,其中,所述检测策略数据库包括至少一个预设检测点以及每个预设检测点对应的检测策略;根据与无人机当前巡检位置相对应的检测策略,控制无人机巡检动作和脱硫塔内部结构的运行工作。
3、在本发明的一个示例性实施例中,所述判断无人机当前巡检位置是否为预设巡检点,可以包括:获取无人机在巡检过程中所拍摄的图像信息;识别无人机在巡检过程中所拍摄的图像信息,确定无人机当前巡检位置;对比无人机当前巡检位置与预设检测点,判断无人机当前巡检位置是否为预设检测点。
4、在本发明的一个示例性实施例中,所述预设检测点可以包括:吸收塔内壁;所述根据与无人机当前巡检位置相对应的检测策略,控制无人机巡检动作和脱硫塔内部结构的运行工作,可以包括:在确定无人机当前巡检位置是吸收塔内壁的情况下,获取无人机吸收塔内壁检测次数;判断无人机吸收塔内壁检测次数是否为当前控制周期内的第一次;在确定无人机吸收塔内壁检测次数是当前控制周期内的第一次的情况下,控制无人机按照预设巡检路线对吸收塔内壁进行拍照;在确定无人机吸收塔内壁检测次数不是当前控制周期内的第一次的情况下,获取无人机位置信息、预设搅拌器位置信息和风管位置信息;判断无人机当前位置是否处于预设搅拌器的范围圈内或风管的范围圈内;在确定无人机当前位置处于预设搅拌器的范围圈内或风管的范围圈内的情况下,控制预设搅拌器或风管工作,同时控制无人机在预设搅拌器的范围圈内或风管的范围圈内运动并拍照。
5、在本发明的一个示例性实施例中,所述预设检测点可以包括:喷淋层喷嘴;所述根据与无人机当前巡检位置相对应的检测策略,控制无人机巡检动作和脱硫塔内部结构的运行工作,可以包括:在确定无人机当前巡检位置是喷淋层喷嘴的情况下,获取每个喷淋层喷嘴的静态照片和无人机位置信息;根据无人机位置信息控制与无人机当前位置相对应的喷淋层喷嘴工作;在与无人机当前位置相对应的喷淋层喷嘴的喷淋过程中,控制无人机在预设拍照位置获取喷淋过程中喷淋层喷嘴的图像信息。
6、在本发明的一个示例性实施例中,所述预设检测点可以包括:喷淋层大梁;所述根据与无人机当前巡检位置相对应的检测策略,控制无人机巡检动作和脱硫塔内部结构的运行工作,可以包括:在确定无人机当前巡检位置是喷淋层大梁的情况下,获取大梁敲击坐标;控制无人机按照大梁敲击坐标对喷淋层大梁进行敲击,并获取敲击声音和敲击过程中的图像信息。
7、本发明第二方面提供了一种基于无人机的脱硫塔内自主巡检方法,所述自主巡检方法包括以下步骤:控制无人机在脱硫塔内部进行初次飞行,采集构建地图所需的激光雷达信息;根据构建地图所需的激光雷达信息,通过slam算法构建脱硫塔内部的全局地图;根据脱硫塔内部的全局地图,通过全局混合a*运动规划算法进行路径规划,并生成路径规划结果;控制无人机按照路径规划结果在脱硫塔内部进行二次飞行,并在二次飞行过程中,采用如上所述的基于无人机的脱硫塔内自主巡检控制方法控制无人机巡检动作和脱硫塔内部结构的运行工作,以采集巡检数据。
8、本发明第三方面提供了一种基于无人机的脱硫塔内自主巡检控制装置,所述控制装置包括:判断模块,用于在巡检过程中,判断无人机当前巡检位置是否为预设检测点;检测策略获取模块,用于在确定无人机当前巡检位置是预设检测点的情况下,从检测策略数据库中获取与无人机当前巡检位置相对应的检测策略,其中,所述检测策略数据库包括至少一个预设检测点以及每个预设检测点对应的检测策略;控制模块,用于根据与无人机当前巡检位置相对应的检测策略,控制无人机巡检动作和脱硫塔内部结构的运行工作。
9、本发明第四方面提供了一种地面控制设备,所述地面控制设备包括处理器和存储器,所述存储器中存储有至少一条计算机程序,所述至少一条计算机程序由一个或多个处理器加载并执行,以使处理器执行上述的基于无人机的脱硫塔内自主巡检控制方法。
10、本发明第五方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有至少一条程序代码,所述程序代码由处理器加载并执行,以使计算机执行上述的基于无人机的脱硫塔内自主巡检控制方法。
11、本发明第六方面提供了一种基于无人机的脱硫塔内自主巡检系统,所述自主巡检系统包括:无人机、塔内控制设备以及如上所述的地面控制设备;所述无人机上搭载有多传感采集单元、飞行控制器和机载控制器,其中,多传感采集单元用于采集无人机周围环境信息,且多传感采集单元至少包括激光雷达、激光测距传感器、imu传感器和摄像模块,飞行控制器用于控制无人机的飞行状态,机载控制器用于将多传感采集单元传递的周围环境信息和飞行控制器传递的飞行状态信息发送至地面控制设备,机载控制器还用于向飞行控制器和多传感采集单元传递地面控制设备发送的控制指令;所述塔内控制设备设置在脱硫塔内,用于控制脱硫塔内部结构的运行状态;所述地面控制设备分别与所述机载控制器和所述塔内控制设备通讯连接,用于根据无人机传递的周围环境信息,生成控制无人机巡检动作和脱硫塔内部结构的运行工作的指令。
12、在本发明的另一个示例性实施例中,所述无人机上可以设置有敲击装置,用于敲击脱硫塔内部结构。
13、通过本发明提供的技术方案,本发明至少具有如下技术效果:
14、(1)本发明针对脱硫塔巡检需求制定了具体的检测策略,能够对需要检测的部位进行详细的检测,从而实现脱硫密闭空间的完整检测;
15、(2)本发明能够实现火电脱硫塔的自主巡检工作,可以显著地提高脱硫塔的巡检效率,大幅降低巡检带来的经济损耗。
16、本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199795.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表