一种基于智慧交互管理的机器人控制系统的制作方法
- 国知局
- 2024-08-01 00:10:58
本发明涉及人工智能,具体为一种基于智慧交互管理的机器人控制系统。
背景技术:
1、在冬季,很多地方积雪情况严重,而且雪每下到2、3厘米还没被清理掉的话,就会错过积雪松软期,路面容易结冰,最好每隔一小时出门清理,单纯靠人力难以有效完成清理工作。从居民的实际生活出发,也必须要清扫自家门前的道路才能正常生活。
2、在过去,用户通常购买传统的扫雪机来自行打扫,或者社区派遣道路清洁工来清扫积雪,这种劳动存在不仅非常费时费力,还存在一定的高危性。因此,从传统扫雪机向电动化、智能化、无人化的扫雪机器人的升级,成为了扫雪机器人市场的明显趋势。现有技术中,扫雪机器人通过360°无死角的摄像头和超声波传感器来识别并躲避扫雪路径上的障碍物,但在冬季很多房屋的屋檐下会产生冰柱,掉落并混杂在雪堆内,扫雪机器人经过时对其无法进行精准检测,即使能够检测也缺乏有效应对措施,导致冰柱被吸入或扫雪机器人的吸入口被碎裂的冰柱卡住,对扫雪机器人的安全运行产生不良影响。因此,设计检测精准性高和智能交互能力强的一种基于智慧交互管理的机器人控制系统是很有必要的。
技术实现思路
1、本发明的目的在于提供一种基于智慧交互管理的机器人控制系统,以解决上述背景技术中提出的问题。
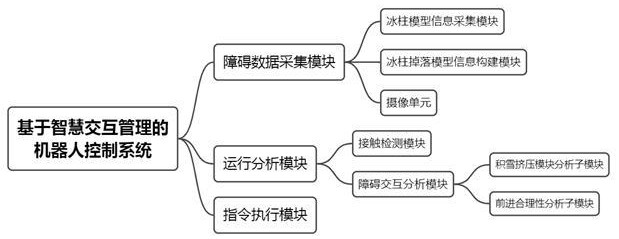
2、为了解决上述技术问题,本发明提供如下技术方案:一种基于智慧交互管理的机器人控制系统,包括障碍数据采集模块、运行分析模块和指令执行模块,所述障碍数据采集模块用于获取扫雪场景的相关信息;所述运行分析模块用于对扫雪机器人运行过程进行分析;所述指令执行模块用于输出所述运行分析模块的分析结果,所述障碍数据采集模块、所述运行分析模块和所述指令执行模块通讯连接,所述运行分析模块和所述指令执行模块电连接。
3、根据上述技术方案,所述障碍数据采集模块包括冰柱模型信息采集模块、冰柱掉落模型信息构建模块和摄像单元,所述冰柱模型信息采集模块用于获取扫雪场景内出现的冰柱画面;所述冰柱掉落模型信息构建模块用于预测冰柱掉落后在雪地内停留的朝向;所述摄像单元用于获取扫雪场景内的画面。
4、根据上述技术方案,所述运行分析模块包括接触检测模块和障碍交互分析模块,所述接触检测模块用于在扫雪机器人行进到目标位置时开启检测;所述障碍物交互分析模块用于对冰柱在雪地内对扫雪机器人行进和机器运行的影响进行分析。
5、根据上述技术方案,所述障碍交互分析模块进一步包括积雪挤压模块分析子模块和前进合理性分析子模块,所述积雪挤压模块分析子模块用于对扫雪机器人上设置的压力传感器受到冰柱挤压的情况进行分析;所述前进合理性分析子模块用于通过所述积雪挤压模块分析子模块的分析结果判断扫雪机器人是否能够继续前进。
6、根据上述技术方案,所述机器人控制系统的运行方法主要包括以下步骤:
7、步骤s1:在扫雪机器人内接入机器人控制系统,通过设置于扫雪机器人中部上方架设的360°高清摄像头拍摄扫雪场景内的全景画面,并控制摄像头抬升视野,获取环境房屋屋檐的图像画面;
8、步骤s2:扫雪机器人主人在扫雪配套的平板内划定需要进行扫雪的区域,控制系统通过画面分析识别并标记冰柱掉落后在雪地内停留的位置;
9、步骤s3:扫雪机器人开始沿着预设的扫雪路径进行移动,当扫雪机器人到达标记的区域时,减速并对前方出现的雪层进行实时监测,预测雪层内存留冰柱的位置;
10、步骤s4:积雪挤压模块分析子模块对积雪中隐藏冰柱在扫雪机器人吸入口前方的停留情况进行分析,判断冰柱的停留对扫雪机器人的行进是否产生明显影响;
11、步骤s5:机器人控制系统通过所述步骤s4中对扫雪机器人行进的判断结果,选择向扫雪机器人发出调整方向或者继续前进的指令。
12、根据上述技术方案,所述步骤s2进一步包括:
13、步骤s21:系统在划定需要进行扫雪的区域内,用最小长方形在外围框定划定区域,并根据平板内选择的视角,以左下角为坐标原点,框定长方形的下侧为x轴正半轴,框定长方形的左侧为y轴正半轴建立平面直角坐标系,框定长方形的左下角坐标为(0,0),根据控制系统获取的虚拟图像比例尺,获取区域的x轴长度为a,y轴长度为b,其中a和b的单位都为米;
14、步骤s22:机器人控制系统通过图像特征识别方法对拍摄的图像画面中冰柱所在位置进行锁定,获取冰柱掉落后在雪地内停留的位置和模型;
15、步骤s23:冰柱掉落后,在扫雪机器人的吸入口同高度的所处平面,通过冰柱所在位置朝向的预测区别方法,将冰柱所在位置可能朝向划分为“水平趋势朝向”和“竖直趋势朝向”。
16、根据上述技术方案,所述步骤s22中,机器人控制系统通过图像特征识别方法对拍摄的图像画面中冰柱所在位置进行锁定的具体方法包括以下步骤:
17、步骤s221:冰柱模型信息采集模块接收待识别的房屋屋檐画面信息,对图像进行预处理,包括灰度化和高斯滤波,图像分割得到冰柱区域,提取冰柱的轮廓特征;
18、步骤s222:将所述步骤s221获得的叶片轮廓特征上传至系统,系统提取冰柱的图像特征后,根据扫雪机器人所在的拍摄位置在区域内坐标(x0,
19、y0),通过冰柱在图像内轮廓面积,推算冰柱与拍摄位置的距离为l,则扫雪机器人与冰柱坐标位置的距离为扫雪机器人当前摄像头的朝向方向与区域内x轴正方向的夹角为θ°,其中-180°<θ≤180°,则冰柱在划定区域内的位置横坐标纵坐标
20、所述步骤s222中,当摄像头朝向方向的延伸线与坐标系内直线y=b相交时,θ>0°;当摄像头朝向方向的延伸线与坐标系内直线y=0相交时,θ<0°。
21、根据上述技术方案,所述步骤s3中,通过所述步骤s222定位冰柱在划定区域内的坐标位置(x,y),则在扫雪机器人前沿机体行进入(x±k,y±k)的区域内后,扫雪机器人由原来的正常运行速度转变到低速,控制扫雪机器人的吸入口功率下降到低功率,并控制扫雪机器人继续向前行驶,其中k为冰柱从屋檐掉落到雪堆后产生的垂直位置最大偏移距离,通过设置于扫雪机器人前进朝向方向、吸入口上方的压力传感器获取扫雪机器人在行进过程中压力传感器的压力值变化,当压力变化值超过压力值的ω%时,判定当前扫雪机器人的前方积雪区域受到冰柱的影响,其中ω为压力变化额定检测值;
22、其中,设置于扫雪机器人上的压力传感器区域可以完全覆盖感知机器人行进过程雪堆及冰柱对其产生的压力。
23、根据上述技术方案,所述步骤s23中,冰柱所在位置朝向的预测区别方法具体为:
24、过冰柱中心点所在位置作一条与地面平行的平面,冰柱一端末与该平面的夹角为α;
25、夹角0≤α≤45°时,系统将当前冰柱所在位置朝向标记为“水平趋势朝向”;
26、夹角45°<α≤90°时,系统将当前冰柱所在位置朝向标记为“竖直趋势朝向”。
27、根据上述技术方案,所述步骤s4中,当扫雪人前方设置的压力传感器在监测时间段内,接收到压力来源区域面积的总增加量超过原有面积的20%时,判定当前冰柱在扫雪机器人前方的朝向为“水平趋势朝向”,并通过指令执行模块输出调整行进方向一的信息;当扫雪人前方设置的压力传感器在监测时间段内,接收到压力来源的区域面积随着扫雪机器人的行进未减小,同时压力面积的总增加量未超过原有面积的20%时,判定当前冰柱在扫雪机器人前方的朝向为“竖直趋势朝向”,并通过指令执行模块输出调整行进方向二的信息,否则通过指令执行模块输出正常行进的信息;
28、调整行进方向一的具体方向调整方法为:确定当前压力来源的区域位置中心点在机器人俯视图中的目标位置点一和压力来源的区域位置内距离转向侧最近对应在机器人俯视图中的目标位置点二,扫雪机器人的转向方向为:向距离目标位置点一距离较远的扫雪机器人前方一侧方向转向;扫雪机器人的总体转向角度为:目标位置点二与距离压力来源位置较近的扫雪机器人后方一侧的连线与机扫雪机器人前方吸入口位置挡板的夹角+μ°,其中μ为机器人额外调整角度避让的安全角度值;
29、调整行进方向二的具体方向调整方法为:确定当前压力来源的区域位置中心点在机器人俯视图中的目标位置点三,扫雪机器人的转向方向为:向距离目标位置点三距离较远的扫雪机器人前方一侧方向转向;扫雪机器人的总体转向角度为:目标位置点三与距离压力来源位置较近的扫雪机器人后方一侧的连线与机扫雪机器人前方吸入口位置挡板的夹角+μ°;
30、其中,所述总体转向角度为机器人整体转过的角度;所述扫雪机器人的一侧具体为系统通过扫雪机器人外围轮廓俯视图获取的扫雪机器人的左侧轮廓或右侧轮廓,所述扫雪机器人的后方一侧则指俯视图中扫雪机器人的左下侧顶点和右下侧顶点;所述扫雪机器人的前方一侧则指俯视图中扫雪机器人的左上侧顶点和右上侧顶点。
31、与现有技术相比,本发明所达到的有益效果是:本发明,通过冰柱掉落模型信息构建模块对划定的扫雪区域进行分析,使得扫雪机器人可以在完善规划扫雪路径的同时,及时对雪堆内可能出现冰柱的位置进行标记,大大提高了机器人的运行安全;同时通过障碍交互分析模块对雪堆内冰柱的朝向进行划分、预测和监测,在保证扫雪机器人安全运行的基础上,最大程度上减少了机器人的方向调整,大大提高了机器人的除雪速率,优化了除雪的路径规划。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199880.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。