基于时间Petri网的制造系统驻留及加工约束的实现方法
- 国知局
- 2024-08-01 00:09:29
本发明属于制造系统自动化,具体涉及一种基于时间petri网的制造系统驻留及加工约束的实现方法。
背景技术:
1、petri网是一种为复杂系统的描述与分析设计提供的建模工具。petri网的元素包括库所,圆形节点;变迁,方形节点;有向弧,库所和变迁之间的有向弧;令牌,库所中的动态对象,可以从一个库所移动到另一个库所。而时间petri网则是在petri网基础上添加了更复杂的发射过程形成的建模工具,使用一种基于变迁和库所均存在时延扩展的petri网能够大幅提升petri网的使用效率,保留托肯作为实际加工对象的表达,作为进一步扩展的标志。这是满足对智能制造系统中扩展信息的前提条件。
2、特别是在晶圆加工制造系统中,由于实际模型的特殊性,对于加工的工艺存在更为复杂的约束性条件,其中包含了冷却池容量、驻留时间、加工间隔等多方面的约束限制。此外,由于晶圆加工中精确性的需求,对实际晶圆的位置和加工状态的跟踪也成为不容忽视的问题。对于拟定的制造系统,多目标工件的独立跟踪标记和冗余信息的去除是一种有效的扩展途径。在实际制造系统中,实际场景下通常期望于观察对应被加工工件的实况信息和处理流程,同时尽可能降低冗余信息造成的时间负担。因此对于时间petri网的标记方式显得更为重要。
3、而petri网本身适配这类晶圆制造系统中快速实现调度的需求,在实现约束条件的问题上则更加突出petri网的表达功能;此外,减少可达图规模是petri网中进行搜索提速的一种方法,可在建模时将部分加工动作进行简化合并,但造成的结果是交换动作中实际晶圆的移动需要特别监管。目前对于直接使用此类时间petri网进行搜索算法解决加工问题的工作仍在扩充阶段。现有技术中通常只提出了对应的时间petri网形式或针对小场景的针对性扩展,并未有更加通用型的处理方式,因此需要针对更通用的工程问题提出解决方案。此外,实际场景中包括了订单问题、驻留约束问题,需要通过程序计算的形式在基于时间petri网的搜索算法中进行分析,但成型的解决方案相对有限;因此这种扩展方式的程序化表达必须进行实现和描述。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种基于时间petri网的制造系统驻留及加工约束的实现方法,通过库所和变迁均存在时延的时间petri网扩展出驻留时间和工件的编号,并将容量约束、驻留时间约束、加工腔间隔约束实现在扩展上并处理了机械臂交换产生的编号监管问题。本发明要解决的技术问题通过以下技术方案实现:
2、本发明提供了一种基于时间petri网的制造系统驻留及加工约束的实现方法,包括:
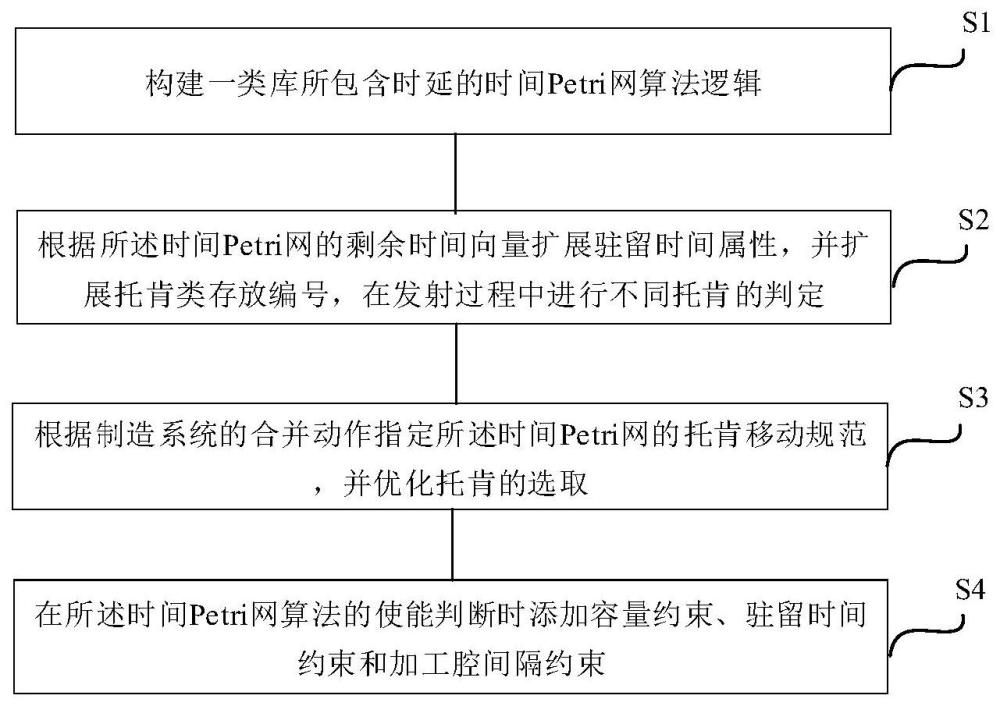
3、s1:构建一类库所包含时延的时间petri网算法逻辑;
4、s2:根据所述时间petri网的剩余时间向量扩展驻留时间属性,并扩展托肯类存放编号以用于在发射过程中进行不同托肯的判定;
5、s3:根据制造系统的合并动作指定所述时间petri网的托肯移动规范,并优化托肯的选取;
6、s4:在所述时间petri网算法的使能判断时添加容量约束、驻留时间约束和加工腔间隔约束。
7、在本发明的一个实施例中,所述s1包括:
8、s1.1:将制造系统物理模型与所述时间petri网的组件进行对应,用库所表示模块状态或资源条件,用变迁表示与机械臂相关的控制行为,用库所中的托肯表示实际工件或可用资源数,库所和变迁之间由带权值的有向弧连接,所述有向弧用于表示执行当前变迁行为后系统工件或资源变化;
9、s1.2:利用所述petri网建模目标信息,所述目标信息包括不同时序下的控制行为及系统状态变化;
10、s1.3:设定系统状态并添加变迁剩余时延向量curdelayt,所述系统状态包含初始化状态、中间状态和目标状态,表达系统状态的标识表示为m={p,ttoken,time},其中,集合p为库所内托肯数的集合,ttoken为记录托肯内剩余加工时间的集合,剩余加工结束后通过负数记录为驻留,time为达到当前标识的时间;
11、s1.4:对所述系统状态间的时间进行计算,进行基础的变迁使能判断以及可同步变迁的计算并得到变迁使能向量;
12、s1.5:通过发射函数计算新标识,所述新标识为发射后形成的新状态;输入变迁后根据当前变迁更新标识的基本信息得到新标识,根据其余变迁能否同步计算不同的变迁剩余时钟。
13、在本发明的一个实施例中,所述s2包括:
14、s2.1:扩展属性,将所述标识中的ttoken扩展为托肯对象集合,托肯对象包含剩余加工时间和编号n;
15、s2.2:驻留时间计算,在完成加工后,若由剩余时间向量判定当前工件剩余加工时间为负数时,将驻留时间记录为当前工件剩余加工时间对应的实数;若由剩余时间向量判定当前工件剩余加工时间计算为正数时,将驻留时间记录为0;
16、s2.3:发射过程优化,在取放动作中,发射过程中取托肯时优先取出剩余时间更小或驻留时间更大的托肯;放入托肯时将整个托肯对象存入,并将时间petri网规则中的时间信息补充在当前托肯内部。
17、在本发明的一个实施例中,所述s3包括:
18、s3.1:获取swap交换时的库所变化情况,构建辅助向量placetoplace,所述辅助向量placetoplace中索引对应库所编号,存放的数值对应内部托肯可移动的目标位置;
19、s3.2:进行取放动作,优先判定被取走托肯的库所的目标库所是否存在于所述辅助向量placetoplace中,若存在,则优先移动当前加工目标,若不存在,则对应为非swap合并动作,采用默认移动规则。
20、在本发明的一个实施例中,所述s4包括:
21、在所述时间petri网的原有使能逻辑中额外添加约束判断条件,所述约束判断条件用于判断当前标识是否超出约束,若超出约束,则当前标识对所有变迁不使能,若未超出约束,则不进行处理,所述约束包括容量约束、驻留时间约束和加工腔间隔约束。
22、在本发明的一个实施例中,所述容量约束通过在时间petri网中当前库所旁添加控制库所可限制当前库所的最大容量;或在时间petri网算法信息预处理时判断下一标识中当前库所中的托肯数,若超出所述容量约束,则所述下一标识不使能,若未超出所述容量约束,则所述下一标识使能。
23、在本发明的一个实施例中,所述驻留时间约束监控特定库所中记录的剩余加工时间并将所述剩余加工时间计算为对应的驻留时间,若发射后新标识中存在驻留时间大于所述驻留时间约束,则所述新标识中所有变迁不使能,若发射后新标识中存在的驻留时间小于或等于所述驻留时间约束,则新标识中所有变迁使能。
24、在本发明的一个实施例中,所述加工腔间隔约束用于记录不同托肯进入加工腔库所时的编号和时间,在当前托肯下一次进入加工腔库所时,若不满足所述加工腔间隔约束,则新标识所有变迁不使能;若满足所述加工腔间隔约束,则更新所述当前托肯进入加工腔库所的时间,新标识正常存在。
25、本发明的另一方面提供了一种存储介质,所述存储介质中存储有计算机程序,所述计算机程序用于执行上述实施例中任一项所述基于时间petri网的制造系统驻留及加工约束的实现方法的步骤。
26、本发明的又一方面提供了一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器调用所述存储器中的计算机程序时实现上述实施例中任一项所述基于时间petri网的制造系统驻留及加工约束的实现方法的步骤。
27、与现有技术相比,本发明的有益效果有:
28、1、本发明基于时间petri网的制造系统驻留及加工约束的实现方法能够将时间petri网紧密结合生产实际且不限制使用的时间petri网类型,对于制造系统资源条件的表达更具适用性;在时间petri网算法逻辑中结合了约束信息,并提供了不同约束行为的算法表达,在petri网应用中能够合理结合约束进行调度研究,而不是依赖于调度搜索后直接否定方案,极大提高了petri网在制造系统调度研究内的适用性。
29、2、本发明提供了针对驻留时间属性的算法扩展,可以将驻留时间属性约束结合至时间petri网的算法规则中,对于驻留时间约束下的调度控制研究更加简洁、适用,便于从算法层面进行驻留时间约束研究;提供了制造系统编号着色逻辑,将时间petri网与着色petri网结合,通过数据结构优化、属性添加、行为补偿等方式,使得时间petri网在求解中能针对混合加工行为、物料跟踪等进行直接分析和调度求解。
30、3、本发明中提出将制造系统的订单、中断状态作为petri网标识用于研究,在petri网应用于紧急订单插入、故障损毁后计算等场景中,具备新的解决能力。
31、以下将结合附图及实施例对本发明做进一步详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199870.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。