一种基于遗传算法的智能RGV动态调度方法及系统
- 国知局
- 2024-08-01 00:08:48
本发明涉及智能rgv动态调度,具体为一种基于遗传算法的智能rgv动态调度方法及系统。
背景技术:
1、在智能rgv的调度过程中,园区内的各个站点组成路径网络,通过遗传算法对其路径进行规划,能够生成运输时间、运动路程最短,或是载货量最大的路径方案,辅助智能rgv进行工业生产。
2、先有技术中的,公开号为cn113743788a公开了一种基于改进遗传算法的工业车辆调度方法,通过遗传算法对多个车辆进行全局路径规划,在多组约束下能够生成路径总距离、总时间、总车次最短的规划结果,以达到降低运输成本的目的。这种方法虽然能够从理论上生成最优路径,但在实际生产中,园区内的道路上常常会有许多临时摆放堆叠的货物形成路障,在这种情况下智能rgv需要进行相应的避障操作,而由于避障后其运动路径会发生改变,可能会导致生成的规划结果适应度发生变化,使其不再是最优路径,同时,由于智能rgv的避障方式通常是在路障前进行直角转向移动,避过路障后再回正方向按照原本的路径进行移动,这种避障方式总体的移动路程也同样较远,不符合路径总距离最短的规划方向。
3、在所述背景技术部分公开的上述信息仅用于加强对本公开的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的在于提供一种基于遗传算法的智能rgv动态调度方法及系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于遗传算法的智能rgv动态调度方法,具体步骤包括:
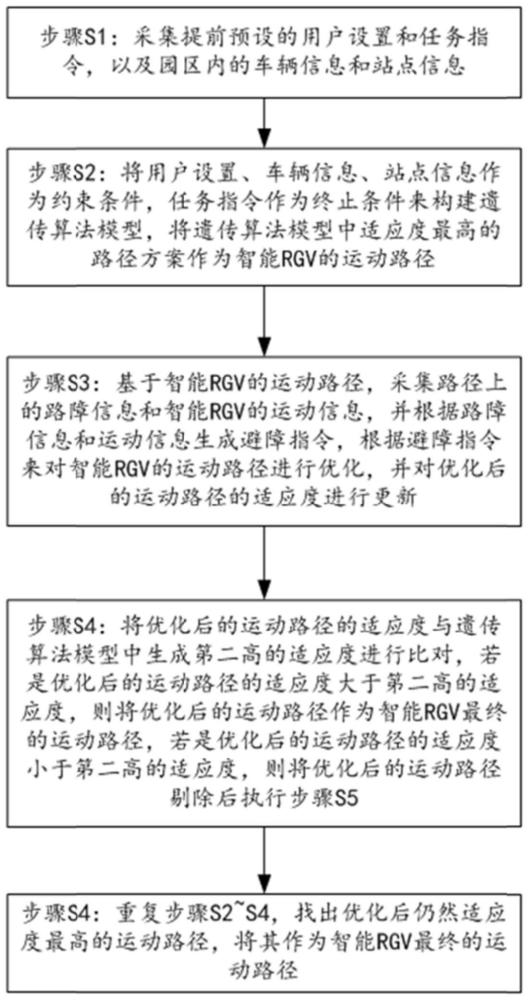
4、s1:采集提前预设的用户设置和任务指令,以及园区内的车辆信息和站点信息;
5、s2:将用户设置、车辆信息、站点信息作为约束条件,任务指令作为终止条件来构建遗传算法模型,将遗传算法模型中适应度最高的路径方案作为智能rgv的运动路径;
6、s3:基于智能rgv的运动路径,采集路径上的路障信息和智能rgv的运动信息,并根据路障信息和运动信息生成避障指令,根据避障指令来对智能rgv的运动路径进行优化,并对优化后的运动路径的适应度进行更新;
7、s4:将优化后的运动路径的适应度与遗传算法模型中生成第二高的适应度进行比对,若是优化后的运动路径的适应度大于第二高的适应度,则将优化后的运动路径作为智能rgv最终的运动路径,若是优化后的运动路径的适应度小于第二高的适应度,则将优化后的运动路径剔除后执行步骤s5;
8、s5:重复步骤s2~s4,找出优化后仍然适应度最高的运动路径,将其作为智能rgv最终的运动路径。
9、优选的,所述用户设置包括任务时间窗口、任务优先度、任务类型,车辆信息包括车辆载重、车辆行驶距离,站点信息包括站点位置、待运货量,任务指令为最短运动路径或最大总运货量。
10、优选的,所述路障信息包括路障位置、路障尺寸,所述运动信息包括运动速度、运动时间、偏转角度。
11、优选的,步骤s3中对运动路径进行优化的逻辑为:
12、s301:检测智能rgv与路障之间的水平距离l,以及智能rgv中心与路障边缘之间的水平距离d1,根据l和d1生成智能rgv的偏转角度θ;
13、s302:根据路障尺寸和偏转角度θ,生成智能rgv避障时在不同阶段下的避障路径,并将生成的避障路径代替初始的运动路径;
14、s303:重复步骤s301~s302,对运动路径中每个有路障的位置均进行替换,从而实现对运动路径的优化。
15、优选的,所述偏转角度为智能rgv运动方向与替换前的运动路径之间的夹角,智能rgv在运动时车身中线与运动路径重合,且车身与运动路径平行。
16、优选的,所述偏转角度θ的计算方式为:
17、在路障靠近智能rgv的一侧所属的平面内取一点并标定为点p,且该点高度与智能rgv相同,该点与路障边缘之间的距离为σ,则当该点与智能rgv车身中线处于同一直线时,计算此时智能rgv的一次偏转角度θ1,计算方式为:
18、
19、由于智能rgv自身具有宽度,为了智能rgv的车身不与路障发生撞击,因此在偏转θ1度后需要进行二次偏转,二次偏转角度θ2的计算公式为:
20、
21、式中d2表示智能rgv的车身宽度,括号表示向上取整;
22、偏转角度θ=θ1+θ2。
23、优选的,所述智能rgv在避障时包括四个阶段,分别为避障阶段、直行阶段、回归阶段、回正阶段;
24、在避障阶段时,智能rgv的偏转角度为θ,并匀速移动l1段距离,将l1标定为避障距离,l1的计算公式为:
25、l1=lsecθ
26、在直行阶段时,智能rgv的偏转角度为0,并继续匀速移动l2段距离,将l2标定为直行距离,l2的计算公式为:l2=d3,式中d3表示路障的长度;
27、在回归阶段时,智能rgv的偏转角度为-θ,并继续匀速移动l3段距离,将l3标定为回归距离,l3的计算公式为:l3=l1;
28、在回正阶段时,智能rgv的偏转角度为0,并沿着原先的运动路径继续匀速运动。
29、优选的,将所述避障路径与运动路径之间的长度差标定为δl,δl的计算方式为:δl=2(l1-l)。
30、一种基于遗传算法的智能rgv动态调度系统,所述调度系统采用上述的调度方法,包括:
31、数据采集模块,所述数据采集模块集成触摸屏、gps定位单元、图像传感单元、运动传感单元,分别用于采集用户设置和任务指令、智能rgv的位置信息、路障图像、智能rgv的运动信息;
32、图像处理模块,所述图像处理模块用于根据数据采集模块采集到的路障图像生成路障信息,并计算智能rgv与路障之间的水平距离;
33、数据处理模块,所述数据处理模块用于构建遗传算法模型,并将适应度最高的路径方案作为智能rgv的运动路径,利用路障信息和运动信息生成避障指令,并根据避障指令来对智能rgv的运动路径进行优化和筛选,找出优化后仍然适应度最高的运动路径,将其作为智能rgv最终的运动路径;
34、数据存储模块,所述数据存储模块用于对车辆信息、站点信息以及智能rgv最终的运动路径进行保存。
35、与现有技术相比,本发明的有益效果是:本发明通过遗传算法生成理论上的最优路径,再根据最优路径上的路障信息生成对应的避障路径,将理论与实际进行结合,实现对最优路径的优化,将最满足实际情况与用户要求的最优路径作为rgv运动的最终路径,从而提高规划结果的合理性和适用性,同时,通过对智能rgv的避障方式进行优化,能够根据路障规格对自身的避障路线进行动态调整,以斜向避障来代替传统直角转向的方式来进行移动,使得优化后的最终路径更加符合总距离最短的需求。
技术特征:1.一种基于遗传算法的智能rgv动态调度方法,其特征在于,具体步骤包括:
2.根据权利要求1所述的一种基于遗传算法的智能rgv动态调度方法,其特征在于:所述用户设置包括任务时间窗口、任务优先度、任务类型,车辆信息包括车辆载重、车辆行驶距离,站点信息包括站点位置、待运货量,任务指令为最短运动路径或最大总运货量。
3.根据权利要求1所述的一种基于遗传算法的智能rgv动态调度方法,其特征在于:所述路障信息包括路障位置、路障尺寸,所述运动信息包括运动速度、运动时间、偏转角度。
4.根据权利要求3所述的一种基于遗传算法的智能rgv动态调度方法,其特征在于:步骤s3中对运动路径进行优化的逻辑为:
5.根据权利要求4所述的一种基于遗传算法的智能rgv动态调度方法,其特征在于:所述偏转角度为智能rgv运动方向与替换前的运动路径之间的夹角,智能rgv在运动时车身中线与运动路径重合,且车身与运动路径平行。
6.根据权利要求5所述的一种基于遗传算法的智能rgv动态调度方法,其特征在于:所述偏转角度θ的计算方式为:
7.根据权利要求6所述的一种基于遗传算法的智能rgv动态调度方法,其特征在于:所述智能rgv在避障时包括四个阶段,分别为避障阶段、直行阶段、回归阶段、回正阶段;
8.根据权利要求7所述的一种基于遗传算法的智能rgv动态调度方法,其特征在于:将所述避障路径与运动路径之间的长度差标定为δl,δl的计算方式为:δl=2(l1-l)。
9.一种基于遗传算法的智能rgv动态调度系统,其特征在于:所述调度系统采用权利要求1-8任一项所述的调度方法,包括:
技术总结本发明提供一种基于遗传算法的智能RGV动态调度方法及系统,涉及智能RGV动态调度技术领域,本发明通过遗传算法生成理论上的最优路径,再根据最优路径上的路障信息生成对应的避障路径,将理论与实际进行结合,实现对最优路径的优化,将最满足实际情况与用户要求的最优路径作为RGV运动的最终路径,从而提高规划结果的合理性和适用性,同时,通过对智能RGV的避障方式进行优化,能够根据路障规格对自身的避障路线进行动态调整,且以更短的距离来进行移动,使得优化后的最终路径更加符合总距离最短的需求。技术研发人员:田海龙,高景文,何佳龙,孟艋,刘鹏,王继利,陈传海,孙雨治,刘立全,路崧,戚才人受保护的技术使用者:吉林大学技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240730/199808.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。