一种用于无人驾驶自动投饲船的控制系统及控制组件的制作方法
- 国知局
- 2024-08-01 00:11:05
本技术涉及海洋水产自动投饲技术的领域,尤其是涉及一种用于无人驾驶自动投饲船的控制系统及控制组件。
背景技术:
1、随着水产养殖的发展,传统的养殖形式已经不能满足水产养殖对科学管理和精细化的需求,人工投料船依赖养殖工人的重复性操作,不仅工作人员负担重,投喂量和投喂位置难以控制,容易造成饲料的浪费,传统投料船不能实时监测和记录投喂量、投喂时间的关键参数。
2、因此,近年来,投饲船趋于自动化发展,配备了自动投喂设备,自动投喂设备内预设投喂方案,投饲船自动航行并将饲料定时、定量投喂到指定的水产养殖区域中,但是其多采用简单的机械或者电气控制系统,功能单一,无法实现精准定位、智能调度和远程操控,使用过程中仍需要大量的人工干预。而且,现有自动投饲船技术方案的导航定位和饲料投放系统的精度优先,饲料投放精度仍然不足,增加了饲料的使用成本。
3、针对上述相关技术,可将先进的定位导航技术和自动化控制技术应用于投饲船的无人驾驶、远程操控和自动投料上,提高养殖投料的效率,并降低养殖饲料的投入成本。
技术实现思路
1、为了提高水产养殖投料的效率,降低养殖饲料的投入成本,本技术提供一种用于无人驾驶自动投饲船的控制系统及控制组件。
2、一方面,本技术提供的一种用于无人驾驶自动投饲船的控制组件,采用如下的技术方案:
3、一种用于无人驾驶自动投饲船的控制组件,包括:
4、定位航标,设置于养殖区域边缘或养殖区域内部,所述定位航标设置数量不少于三个,多个所述定位航标上均设置有测距装置,以用于定位养殖区域中的投饲船;
5、所述定位航标设置于养殖区域内部时,多个所述定位航标之间组成投饲船的航行区域。
6、通过采用上述技术方案,定位航标是投饲船自动航行的定位基础,通过其上设置的测距装置与投饲船上相应的信号接收装置进行信号的收发实现投饲船于区域内部定位,基于其功能,定位航标的设置分为两种情况,其一为定位航标设置于养殖区域边缘,其二为定位航标设置在养殖区域内部;
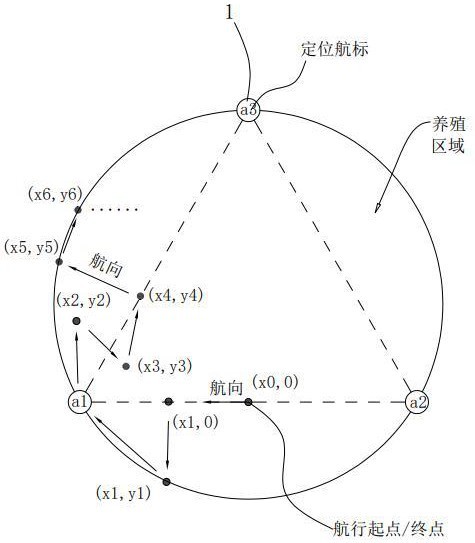
7、其一,当定位航标设置在养殖区域边缘时,其数量不少于三个,通常设置三个即可,三个定位航标形成的圆形区域要包括整个养殖区域,依据三角定位的原理,投饲船与定位航标上的测距装置实时定位投饲船与三个定位航标的距离,通过三组距离数值判断船舶所在位置;此方法适应养殖区域较小、精细投饲的情况;
8、其二,当定位航标设置在投饲船的养殖区域内时,其数量不少于三个,具体按照养殖区域的情况决定,多个定位航标设置在养殖区域内投饲船的航线拐角处,起到标识作用,投饲船行驶到靠近定位航标一定距离时改变方向,朝向下一个拐角处的定位航标航行;此方法适应养殖区域较大的情况。
9、另一方面,基于上述的一种用于无人驾驶自动投饲船的控制组件,本技术提供一种用于无人驾驶自动投饲船的控制系统采用如下技术方案:
10、一种用于无人驾驶自动投饲船的控制系统,包括航标监测模块、航行控制模块、自动投料模块、中心控制模块;
11、所述航标监测模块设置于所述定位航标上,所述航标监测模块实时监测养殖区域中环境数据,并与投饲船进行实时定位通讯,所述航标监测模块将监测数据上传到所述中心控制模块中,所述中心控制模块根据监测、定位数据实时判断养殖区域的环境信息,并定位投饲船所在的准确方位;
12、所述航行控制模块内预设有养殖区域中的投饲路线,控制投饲船按照预设路线前进;所述航行控制模块接收所述中心控制模块的控制指令,实时调整前进路线、速度、方向;
13、所述自动投料模块内预设有投料方案,所述自动投料模块配合所述航行控制模块,在投饲船航行到预设位置后,定量播撒饲料;所述自动投料模块接收所述中心控制模块的即时指令,实时播撒或停止播撒饲料。
14、通过采用上述技术方案,接上述定位航标的两种设置方式,实现船舶自动航行需由相关技术人员预先在船舶的航行控制模块中预先设置变化节点,即投饲船的航行节点;
15、其一,当定位航标设置在养殖区域边缘时,比如,三组定位航标分别以a1、a2、a3代替,以养殖区域的投饲船出发点为起点,起点一般为a1、a2连线中点,以起点为原点创建便于设置数值的一平面坐标系,起点可为(x10,0)、(x20,0)、(x30,y30),起点为一个航行节点,而后,设置船的下一个航行节点为(x11,0)、(x21,0)、(x31,y30),使投饲船沿a1、a2的连线中点平行移动至上述航行节点,当移动到此航行节点后,自动投料模块开始撒料,也可以设置出料速度,在投饲船整个投饲过程中使自动投料模块持续出料,按照此方法设置的航行终点需要与航行起点重合,以保证全养殖区域内的投饲;
16、其二,当定位航标设置在养殖区域内部时,起到标识作用,在投饲船于两个航行节点之间航行时通常只有一个位置变化量,如投饲船在相邻两航行节点航行时,起点为(x10,y10),则这段航线内x10为变化量或者y10为变化量,即投饲船按照直线前进,以多段组成的s型直航线覆盖全饲养区域;因此,在相关技术人员设置平面坐标系时,应保证预设的s型直航线垂直坐标系的x、y轴;在定位航标的此设置方式下,自动投料模块应在投饲船的整个投饲过程中持续出料,以适应大范围饲养区域中的饲料覆盖,因此,相关技术人员应设置出料速度,即控制出料闸口的出料面积;
17、无论上述哪种设置方式,在技术人员设置投料方案时均应确保投料时长或者投料节点适配航行节点;
18、另外,由于投饲船航行时无法避免风浪颠簸,因此,每个航行节点的位置数据都存在一数值波动范围,正常天气的海浪颠簸或风速下,投饲船的位置数值信息在波动范围之内。
19、可选的,所述航标监测模块包括区域监测单元与红外测距单元;
20、所述区域监测单元设置于所述定位航标上,实时监测养殖区域内的风速、潮湿度、温度的环境数据,将监测数据发送至所述中心控制模块中;
21、所述红外测距单元包括设置在多个所述定位航标和投饲船上的红外测距传感器,投饲船与所述定位航标上分别设置红外测距传感器的不同端,通过红外测距传感器测得投饲船与每个定位航标的距离数据,红外测距单元将每组距离数据实时发送至所述中心控制模块,所述中心控制模块根据投饲船的距离数据判断投饲船所在位置。
22、通过采用上述技术方案,上述区域监测单元监测的风速、潮湿度、温度等环境数据影响饲料的保存与投放,中心控制模块中针对上述风速、潮湿度、温度等设置一正常值范围,上述每组数据均处于正常值范围内则代表可以正常投料,当上述某一组数据处于正常值范围外则当前环境无法投料,比如风速过大,投饲船无法航行;潮湿度过大,在长时间的投饲过程中无法有效保持新鲜;温度过高的极热天气、温度过低的极寒天气均影响生物上浮进食;
23、上述风速、潮湿度、温度的测量采取传感器的形式,如螺旋桨式风速传感器、温度传感器、湿度传感器等,这些传感器可设置在任意定位航标上;
24、进一步地,陆地管理公司可以在养殖区域中设置小型气象监测平台,预测航区内天气,以便于将每次投饲安排在正常天气下,避开极端天气;
25、此外,红外测距单元也采用传感器的形式,定位航标上为红外测距传感器的发射端,投饲船上设置有红外测距传感器的接收端,投饲船上设置的红外测距传感器的接收视场应呈360°的环状以实时接收平面内任一角度的红外测距传感器的发射信号,确保投饲船航行过程中的实时定位。
26、可选的,还包括;
27、mesh无线单元,设置于投饲船与多个所述定位航标上,用于所述区域监测单元、多个所述红外测距单元与投饲船的实时信号、指令的传输。
28、通过采用上述技术方案,考虑到投饲船船体的材料、厚度可能导致信号屏蔽,对于距离较远的定位航标发送的信号,船体内设置的中心控制单元的控制组件无法有效接收信号,即信号较弱、数据收发延迟较高,因此,在投饲船的舱外、舱内及每个定位航标上均设置mesh无线单元11,用于红外测距传感器、区域监测单元的实时数据收发,投饲船舱外、舱内的近距离信号收发可克服信号屏蔽问题。
29、可选的,还包括;
30、监控摄像单元,包括设置于投饲船两侧的监控摄像头,所述监控摄像单元连接所述中心控制模块,接收所述中心控制模块的指令对目标区域进行监控;
31、智能识别单元,所述智能识别单元实时调取所述监控摄像单元的监控画面,智能识别监控画面中的物体、生物,将识别结果发送至所述中心控制模块中。
32、通过采用上述技术方案,监控摄像单元中的监控摄像头设置在投饲船船体两侧,能够360°拍摄船体周边实况,而智能识别单元可对监控摄像头拍摄的画面进行实时识别,实时采集养殖区域内的图像信息,识别画面中的物体、生物等,将识别结果上传至中心控制模块中,由中心控制模块生成相应指令。
33、可选的,还包括;
34、数据存储模块,连接所述中心控制模块、所述智能监控模块存储所述中心控制模块的历史指令、所述智能监控模块的监控画面;
35、无线通讯模块,提供多条网络通讯通道,用于投饲船与岸基、陆地管理公司之间的数据、信息、指令收发。
36、通过采用上述技术方案,上述监控摄像单元采集的画面信息、智能识别单元的识别结果上传至中心控制模块中后,中心控制模块根据识别结果生成相应的指令后,将画面信息上传至数据存储模块中,数据存储模块进行存储备份,供控制人员调取;
37、此外,投饲船船内配备无线通讯模块,可与岸基、投饲船管理公司内部的控制终端实时通讯,投饲船的管理人员在陆地上实时调取投饲船内部信息与环境监测信息,比如监控摄像头拍摄的投饲船周边监控画面,比如自动投料模块的已投料量、待投料量、投料速度,比如红外测距传感器测得的投饲船船体所在的精确位置等信息;上述信息均由数据存储模块或中心控制模块通过无线通讯模块发送至岸基、投饲船管理公司内部的人机交互模块中,展示给投饲船管理公司或岸基上的管理人员,而管理人员通过人机交互模块键入指令,实时控制投饲船的运行。
38、可选的,所述智能识别单元连接所述红外测距单元,所述智能识别单元与所述红外测距单元之间设置有智能纠偏单元;
39、所述智能识别单元识别监控画面中的所述定位航标,检测所述定位航标上的红外测距传感器位置并判断所述定位航标上红外测距传感器一端与投饲船上红外测距传感器一端是否对齐,若没有对齐,则所述智能识别单元向所述智能纠偏单元发送纠偏信号、红外测距传感器两端偏差角度,所述智能纠偏单元接收纠偏信号后调取所述智能识别单元监测红外测距传感器两端偏差的角度,向所述红外测距单元发送相应的纠偏指令。
40、通过采用上述技术方案,投饲船投饲时海浪颠簸导致船体晃动,当船体晃动幅度较大时,投饲船上的红外测距传感器接收端无法接受到发射端发出的红外测距光线,所以,需要设置智能纠偏单元对船体的红外测距传感器接收端进行角度补偿,保证信号的实时接收;
41、智能纠偏单元可选用陀螺仪,陀螺仪安装在投饲船的红外测距传感器的接收端,控制红外测距传感器接收端的视场转动,智能纠偏单元配合智能识别单元,在实际应用时定位航标上设置一标识,当船体颠簸时通过监控摄像单元对准定位航标拍摄,由智能识别单元识别标识,并计算偏差角度,向智能纠偏单元发送纠偏信号,智能纠偏单元控制陀螺仪按照纠偏信号使红外测距传感器的接收端视场转动相应角度,对齐红外测距传感器的发射端。
42、可选的,还包括声提示单元、光报警单元;
43、所述声提示单元连接所述中心控制模块,接收所述中心控制模块的指令,所述中心控制模块调取所述智能识别单元的识别结果,若画面中存在其他船只,所述声提示单元提示船只远离投饲船的预设航线;所述中心控制模块接收所述区域监测单元的环境数据信息,判断养殖区域内的环境,若当前环境不适合投饲,所述声提示单元发出提示;
44、所述光报警单元配合所述声提示单元发出报警。
45、通过采用上述技术方案,声提示单元与光报警单元主要用于投饲船航线上出现其他船只时,向其他船只发出声音、光线警报,提示其远离养殖区域;
46、当智能识别单元识别出监控摄像单元中的其他船只后,向中心控制模块发送识别信息,中心控制模块中计算分析其他船只的航行路线是否与投饲船的航行路线重合,阻碍投饲船的航行,若阻碍投饲船的航行,则声提示单元发出提醒;
47、光报警单元主要用于夜晚投饲,对于阻碍到投饲船航行的船只,光报警单元能够引起其他船只驾驶人员的注意,提示投饲船所在位置。
48、与现有技术相比,本技术的有益效果在于:
49、1、采用mesh技术进行无线自组网络,减少电缆安装、接线及船舶重量。由于无人船巡检可能面临各种复杂的环境和天气条件,传统的有线通信可能会受到限制,如果采用电缆连接也增加了系统的故障风险,而采用无线自组网络可以提供更高的可靠性和安全性。
50、2、船舶由钢板制成,屏蔽性较强,无线自组网技术采用独特信号收发器克服了船舶的屏蔽性难题 。从机舱到驾驶只需两个微型基站 即可实现全船通信,无人驾驶系统采用独特算法,可进行自适应无人遥控,自动识别规避障碍物,利用定位浮标上的测距装置测量实时计算船舶位置,使船舶按照预设航路航行,确保不偏离,实现了船舶的无人化,提高了设备的安全性和可靠性,减小了人员操作。
51、3、自动投料,设备自动化水平高,无需人工干预,且具备强大的抛洒能力,有效降低了养殖的人工成本。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199901.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表