一种基于径向基函数的增益调度自动驾驶仪设计方法
- 国知局
- 2024-08-01 00:10:59
本发明属于飞行器控制,具体涉及一种基于径向基函数的增益调度自动驾驶仪设计方法。
背景技术:
1、现有的增益调度自动驾驶仪中,经典的增益调度设计是选取特征点设计相应的lti控制器后,控制器增益曲面一般采用线性插值方式得到,但由于线性插值的一阶不连续性,可能会造成控制器增益的突变,这将对控制器的性能造成一定的影响。对此,工程中常通过对控制器增益的全局调整和验证保证其变化尽量光滑。
2、为了对控制器增益的全局调整和验证,现有的控制器增益曲面的参数化方法的做法是,通过多项式等基函数将控制器增益随调度量变化的曲面参数化,然后采用非光滑优化算法,以特征点处的性能和稳定性指标为目标函数,通过调节增益曲面参数,完成对整个控制器增益曲面的调节,从而直接得到光滑的控制器增益曲面,避免事后的处理过程。可由于事先难以明确控制器增益随增益调度量变化的特点,基函数选择具有相当的挑战性。以选用多项式函数做基函数为例,多项式阶次选取过低,会限制增益曲面的非线性表达能力,造成性能的损失;多项式阶次选取过高,导致增益曲面待调节参数过多,引入高维优化问题,造成非光滑优化算法寻找时间过长。更为严重的是过多调节参数引起的“维度灾难”还会增加问题复杂度,造成寻优困难。
3、因此,本发明提出一种基于径向基函数的增益调度自动驾驶仪设计方法,采用径向基函数拟合增益曲面,借助径向基函数交强的非线性的表达能力,可通过较少的特征点以较高的精度表达或拟合控制器增益曲面,避免了基函数的选择困难,同时径向函数本身的光滑特性更能避免增益的突变问题,进一步提高增益调度自动驾驶仪的可靠性和实用性。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于径向基函数的增益调度自动驾驶仪设计方法,用于解决上述问题。
2、为达到上述目的,本发明提供如下技术方案:
3、本发明一种基于径向基函数的增益调度自动驾驶仪设计方法,包括:
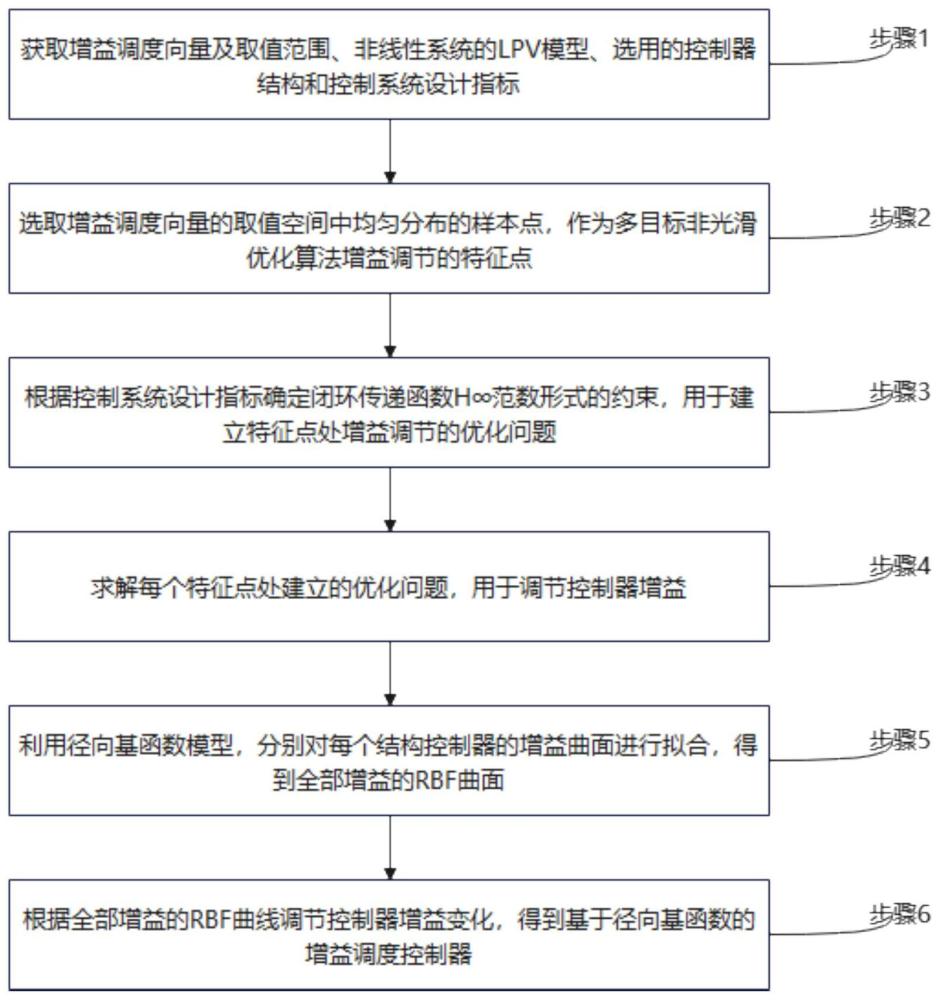
4、步骤1、获取增益调度向量及取值范围、非线性系统的lpv模型、选用的控制器结构和控制系统设计指标;
5、步骤2、选取增益调度向量的取值空间中均匀分布的样本点,作为多目标非光滑优化算法增益调节的特征点;
6、步骤3、根据控制系统设计指标确定闭环传递函数h∞范数形式的约束,用于建立特征点处增益调节的优化问题;
7、步骤4、求解每个特征点处建立的优化问题,用于调节控制器增益;
8、步骤5、利用径向基函数模型,分别对每个结构控制器的增益曲面进行拟合,得到全部增益的rbf曲面;
9、步骤6、根据全部增益的rbf曲线调节控制器增益变化,得到基于径向基函数的增益调度控制器。
10、进一步,步骤1包括:
11、获取高度h、马赫数mach、速度v和动压q作为增益调度变量,同时根据预设取值数据确定增益调度向量的取值范围;
12、获取自动驾驶仪预安装的目标设备在姿态动力学的线性定常模型,获取多个特征点的线性定常模型对状态空间表达式中的参数进行拟合,得到目标设备运动的非线性系统的lpv模型;
13、获取选用的控制器结构,包括:采用经典两回路自驾仪作为基本结构,并增加前馈环节以及采用比例积分方式对俯仰角指令进行跟踪控制;
14、获取控制系统设计指标,包括:闭环系统的一阶环节等效时间常数和超调评价目标设备自动驾驶仪的跟踪性能,相对裕度和幅值裕度评价目标设备自动驾驶仪的稳态性能。
15、进一步,获取自动驾驶仪预安装的目标设备在姿态动力学的线性定常模型,包括:
16、
17、其中,α为攻角,θ为俯仰角,ωz为俯仰角速度,δz为升降舵偏角;aij为动力系数,表征目标设备的动力学特性。
18、进一步,根据多个特征点的线性定常模型对状态空间表达式中的参数进行拟合,得到目标设备运动的非线性系统的lpv模型,包括:
19、
20、其中,α为攻角,θ为俯仰角,ωz为俯仰角速度,δz为升降舵偏角,h表示滑翔飞行器高度;ma表示滑翔飞行器飞行马赫数;a11(h,ma)、a31(h,ma)、a33(h,ma)表示参数拟合后,在滑翔飞行器高度为h,马赫数为ma状态下插值得到的数值;b11(h,ma)、b31(h,ma)表示参数拟合后,在滑翔飞行器高度为h,马赫数为ma状态下插值得到的数值。
21、进一步,闭环系统的一阶环节等效时间常数和超调评价目标设备自动驾驶仪的跟踪性能,相对裕度和幅值裕度评价目标设备自动驾驶仪的稳态性能,包括:
22、过载回路的一阶环节等效时间常数为0.5s,单位阶跃响应超调不大于20%;
23、俯仰角跟踪回路的一阶环节等效时间常数为2s,单位阶跃响应超调不大于20%;
24、闭环系统的幅值裕度不低于3db,相位裕度不小于30°。
25、进一步,步骤2包括:
26、基于拉丁超立方采样的方法,对增益调度变量取值空间内的样本点进行均匀采样,选取预设数量的样本点作为多目标非光滑优化算法增益调节的特征点。
27、进一步,根据控制系统设计指标确定闭环传递函数h∞范数形式的约束包括:
28、获取控制系统设计指标中的过载回路和俯仰角跟踪回路的跟踪性能作为目标函数,其闭环传递函数h∞范数形式的约束可表示为:
29、通过‖wny(s)sny(s)‖∞<1表示过载指令的跟踪性能要求;其中,sny(s)表示从过载指令nyc到跟踪误差eny的传递函数,wny(s)为与一阶环节等效时间常数和超调相关的带通滤波器形式的第一权重系数;
30、通过‖wθ(s)sθ(s)‖∞<1表示俯仰角指令的跟踪性能要求;其中,sθ(s)表示从俯仰角指令θc到跟踪误差eθ的传递函数,wθ(s)为与一阶环节等效时间常数和超调相关的带通滤波器形式的第二权重系数;
31、以稳定裕度指标为约束,通过‖wδ(s)(2sδ(s)-i)‖∞<1表示稳定裕度要求;其中,sδ(s)表示从干扰信号ν到舵偏角指令δc的传递函数,wδ(s)用于表征幅值裕度和相位裕度,‖·‖为h∞范数。
32、进一步,求解每个特征点处建立的优化问题,包括:
33、采用兼容多种设计准则的非光滑算法求解每个特征点处建立的优化问题。
34、进一步,步骤5包括:
35、径向基函数的基本形式为:
36、
37、其中,n是样本点数量;xs代表样本点;μ代表常值或者多项式模型;λi是通过线性方程组求解的径向函数权重系数;φ代表径向函数;
38、
39、其中,c为形状参数,值为1或1/n,当μ为常值时,值为零或通过下式进行计算:
40、
41、其中,ys为样本点的响应值,当μ取为多项式模型时:
42、
43、其中,m表示多项式函数的项数,bj表示响应的权重系数;
44、当多项式数量达到预设阈值时,获取正交条件:联立正交条件与径向基函数得到:
45、
46、其中,aij=φ(‖xs(i)-xs(j)‖),i=1,2,...,n,j=1,2,...,n,表示样本点在各径向函数处的取值;pij=pj(xs(i)),i=1,2,...,n,j=1,2,...,m,表示样本点在各多项式处的取值;λ=[λ1,λ2,...,λn]t,为径向函数项的权重系数;b=[b1,b2,...,bn]t为多项式项的权重系数;pt表示矩阵p的转置矩阵。
47、本发明的有益效果在于:
48、本发明的技术方案与基于参数化增益曲面的增益调度设计方法相比,该技术方案不需进行函数形式选择,避免了非线性表达能力和优化问题维度的权衡难题,简化了设计步骤,降低设计的难度,有利于飞行器自动驾驶仪设计的自动化。
49、本发明的其他优点、目标和特征将在随后的说明书中进行阐述,并且在某种程度上对本领域技术人员而言是显而易见的,或者本领域技术人员可以从本发明的实践中得到教导。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
50、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199885.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表