一种多无人艇双边优化安全追逃博弈控制器设计方法
- 国知局
- 2024-08-01 00:11:41
本发明属于全自动化产品领域,涉及一种多无人艇双边优化安全追逃博弈控制器设计方法。
背景技术:
1、近年来,多无人艇协同控制的应用范围不断扩大,涵盖了广泛的民事和军事任务,如协调救援、协同围堵和拦截驱离等。追逃博弈因其在军事作战、刑侦追捕等领域中的广泛应用备受关注。
2、模型预测控制因为其能够帮助追踪者和逃跑者更深入地理解对手的行为模式,从而制定最优决策,引起了研究者的极大关注。然而,目前基于模型预测控制的追逃博弈方法大多基于一阶系统设计,主要考虑了被控目标的运动学,其忽略了实际系统动力学中含有的大量系统模型不确定性和复杂海洋环境扰动。上述不确定性及海洋环境扰动在无人艇追逃博弈过程中将对追逃结果产生较大影响。此外,在多无人艇追逃博弈过程中,追逃控制策略需要考虑个体之间的碰撞,还要兼顾避免与环境中的障碍物发生碰撞。因此,在复杂的海洋环境中实现安全、快速的追逃博弈控制仍然是一个值得深入研究的问题。综上所述,现有基于模型预测的无人艇集群追逃博弈方法仍存在以下不足之处:
3、第一,现有基于模型预测控制的追逃策略大多是只考虑被控目标的运动学而忽略了动力学,可能导致在某些情况下追逃博弈结果无法保证。而且,大多数方法只考虑了一组追逃对象,通用性较差。
4、第二,现有基于模型预测控制的追逃策略只关注追捕逃跑无人艇的可行性,而忽略了多个追踪无人艇在追捕过程中面临的静态障碍物、邻居追踪无人艇、以及非目标逃跑无人艇的碰撞风险,无法保障多无人艇系统的安全性。
5、第三,现有的基于具体模型的控制器设计需要依赖模型动力学参数,这种依赖预设参数的方式可能会对控制器的设计和调整带来一定的局限性,使得控制器难以适应不同的场景和任务需求。
技术实现思路
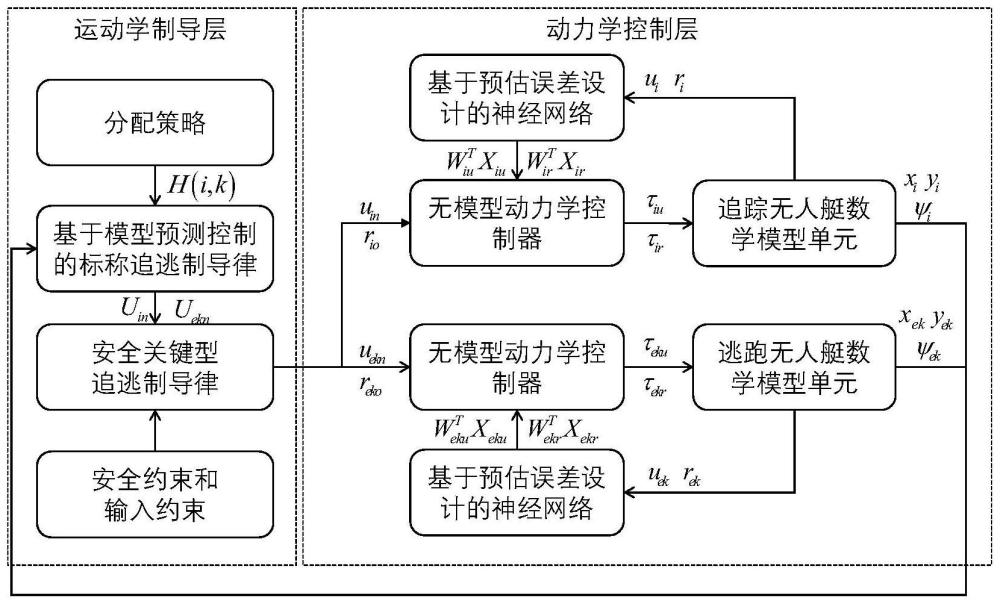
1、为了解决上述问题,本发明采用的技术方案是:一种多无人艇双边优化安全追逃博弈控制器设计方法,包括以下步骤:
2、基于m个追踪艇位置以及m个逃跑艇位置,设计分配策略,将m个追踪艇和m个逃跑艇一对一进行追踪锁定;
3、设计双边优化函数,设计逃跑无人艇的最优标称速度控制律和追踪无人艇的最优标称速度控制律;
4、基于安全约束、逃跑无人艇的最优标称速度控制律和追踪无人艇的最优标称速度控制律,设计追踪艇和逃跑艇的安全关键型追逃制导律;
5、基于安全关键型追逃制导律和追踪无人艇基于预估误差设计神经网络的更新律设计追踪无人艇的动力学控制器;
6、基于安全关键型追逃制导律和逃逸无人艇基于预估误差设计神经网络的更新律设计逃逸无人艇的动力学控制器;
7、基于追踪无人艇的动力学控制器和逃逸无人艇的动力学控制器分别对追踪无人艇和逃逸无人艇进行控制,实现m个追踪艇和m个逃跑艇安全追逃博弈过程的控制。
8、进一步地:所述基于m个追踪艇位置以及m个逃跑艇位置,设计分配策略,将m个追踪艇和m个逃跑艇一对一进行追踪锁定如下:
9、追踪艇位置pek;逃跑艇位置pi,基于位置信息建立的分配矩阵,n代表表示基于位置信息建立的分配矩阵中不为0的个数,追踪艇和逃跑艇个数为m;
10、计算第i艘追踪无人艇和第k艘逃跑无人艇的距离ρiek;
11、如果n>m,则:
12、如果第i艘追踪无人艇和第j艘逃跑无人艇的距离ρiej为最远距离,设置分配矩阵h(i,j)=0;
13、如果对于第i艘追踪无人艇,只存在第k艘逃跑无人艇的分配矩阵h(i,k)≠0,设置其它追踪无人艇和第k艘逃跑无人艇的分配矩阵h(j,k)=0,j≠i;
14、如果对于第m艘逃跑无人艇,只存在第i艘追踪无人艇的分配矩阵h(i,m)≠0,则设置其它逃跑无人艇和第i艘追踪无人艇的分配矩阵h(i,n)=0,n≠m,
15、输出分配矩阵h(i,k)。
16、进一步地:设计双边优化函数,设计逃跑无人艇的最优标称速度控制律和追踪无人艇的最优标称速度控制律;
17、所述双边优化函数如下:
18、
19、表示第k艘逃跑无人艇的标称速度控制律;
20、表示第i艘追踪无人艇的标称速度控制律
21、通过求解极大-极小问题,即可得出第i艘追踪无人艇的标称速度控制律;首先估计第k艘逃跑无人艇的最优标称速度控制律
22、
23、和分别表示追踪无人艇和逃跑无人艇的状态变量;
24、和分别表示为追踪无人艇和逃跑无人艇的输入变量;
25、且需满足约束条件:
26、
27、其次根据的值计算追踪无人艇的最优控制
28、
29、需满足约束条件:
30、
31、通过求解极小-极大问题,即可得出第k艘逃跑无人艇的标称速度控制律;首先估计第i艘追踪无人艇的最优标称速度控制律
32、
33、且需满足约束条件:
34、
35、其次根据的值计算追踪无人艇的最优控制
36、
37、需满足约束条件:
38、
39、式中,xi0,xek0分别表示追踪无人艇和逃跑无人艇的初始状态;qi,qek,ri,rek表示矩阵;ai=[1,0;0,1;-1,0;0,-1],aek=[1,0;0,1;-1,0;0,-1],
40、进一步地:所述安全约束包括追踪无人艇和邻居追踪无人艇的安全约束、追踪无人艇和非追踪目标的逃跑无人艇的安全约束、追踪无人艇避免与静态障碍物的安全约束、逃跑无人艇避免与非追踪的追踪无人艇的安全约束和逃跑无人艇与静态障碍物的安全约束;
41、所述追踪无人艇和邻居追踪无人艇的安全约束设计如下:
42、定义一个安全集设计追踪无人艇和邻居追踪无人艇的控制障碍函数为:
43、其中,pi=[xi,yi]t和pj=[xj,yj]t分别表示为第i个追踪无人艇和第j个邻居追踪无人艇的位置向量;是一个常数,ζij=ψi-(π/2+ψij),ψij=atan2(yj-yi,xj-xi);设计追踪无人艇和邻居追踪无人艇控制障碍函数的安全约束为:
44、其中:为待设计的参数;
45、所述追踪无人艇和非追踪目标的逃跑无人艇的安全约束设计如下:
46、定义一个安全集设计踪无人艇和非追踪目标的逃跑无人艇控制障碍函数为:
47、其中,pi=[xi,yi]t和pel=[xel,yel]t分别表示为第i个追踪无人艇和第1个非追踪目标的逃跑无人艇的位置向量;是一个常数,设计踪无人艇和非追踪目标的逃跑无人艇控制障碍函数的安全约束为:
48、其中,为待设计的参数;
49、所述追踪无人艇避免与静态障碍物的安全约束设计如下:
50、定义一个安全集设计追踪无人艇避免与静态障碍物的控制障碍函数为:
51、其中,pol=[xol,yol]t表示为第1个静态障碍物的位置向量;是一个常数,设计追踪无人艇避免与静态障碍物的控制障碍函数的安全约束为其中,为待设计的参数;
52、所述逃跑无人艇与邻居逃跑无人艇碰撞的安全约束设计如下:
53、定义一个安全集其中,pek=[xek,yek]t和pem=[xem,yem]t分别表示为第k艘逃跑无人艇和第m艘邻居逃跑无人艇的位置向量;是一个常数,设计逃跑无人艇与邻居逃跑无人艇碰撞控制障碍函数的安全约束为其中,为待设计的参数;
54、所述逃跑无人艇避免与非追踪的追踪无人艇的安全约束设计如下,
55、定义一个安全集其中,pn=[xn,yn]t表示为第n个非追踪的追踪无人艇的位置;是一个常数,ζekn=ψek-(π/2+ψekn),ψekn=atan2(yn-yek,xn-xek);设计逃跑无人艇避免与非追踪的追踪无人艇控制障碍函数的安全约束为其中,为待设计的参数;
56、所述逃跑无人艇与静态障碍物碰撞的安全约束设计如下:
57、定义一个安全集其中是一个常数,设计逃跑无人艇与静态障碍物碰撞的控制障碍函数的安全约束为其中,为待设计的参数。
58、进一步地:所述追踪艇和逃跑艇的安全关键型追逃制导律的设计如下:
59、
60、
61、式中,
62、
63、
64、且
65、
66、rio表示第i艘追击无人艇的安全关键型制导角速度;
67、reko表示第k艘逃逸无人艇的安全关键型制导角速度;
68、rir表示第i艘追击无人艇的的标称制导艏摇角速度;rekr表示第k艘逃逸无人艇的标称制导制导艏摇角速度;
69、进一步地:所述追踪无人艇基于预估误差设计神经网络的更新律设计如下:
70、
71、式中,为ui的估计值;为ri的估计值;为wiu的估计值;为wir的估计值;为ui估计值的导数;为ri估计值的导数;为wiu估计值的转置;为wir估计值的转置;wiu和wir是未知矩阵;ξiu和ξir是输入矩阵;xiu(ξiu),xir(ξir)是已知激励函数矩阵,为设计系数;proj为投影算子;
72、逃跑无人艇基于预估误差设计神经网络的更新律设计如下:
73、
74、式中,为uek的估计值;为rek的估计值;为weku的估计值;为wekr的估计值;为uek估计值的导数;为rek估计值的转置;为weku估计值的导数;为wekr估计值的转置;weku和wekr是未知矩阵;ξeku和ξekr是输入矩阵;xeku(ξeku)和xekr(ξekr)是已知激励函数矩阵。为设计系数;proj为投影算子。
75、进一步地:所述追踪无人艇的动力学控制器如下:
76、
77、式中,和为质量增益参数;和是控制参数;
78、所述逃跑无人艇的动力学控制器如下:
79、
80、式中,和为质量增益参数;和是控制参数。
81、本发明提供的一种多无人艇双边优化安全追逃博弈控制器设计方法,本发明研究了含有未知系统动态、复杂环境扰动的多无人艇协同追逃博弈问题,提出一种多无人艇双边优化安全追逃博弈控制控制方法,解决在复杂的海洋环境中,无人艇系统之间有效避碰并协同追捕逃跑无人艇的问题。
82、具有以下优点:第一,与现有只考虑被控目标的运动学而忽略了动力学的追逃策略相比,提出的方法不仅综合考虑了无人艇的动力学和运动学特性,还设计了一种分配策略,避免追踪者和逃跑者之间距离过长,提高了协同追捕任务的追捕速度。
83、第二,与现有未考虑避碰问题的协同追捕策略相比,提出的方法通过设计不同的控制障碍函数,能够避免与环境中静态障碍物、邻居追踪无人艇、以及非目标逃跑无人艇的碰撞,提高了协同追捕任务的安全性。
84、第三,与现有的基于具体模型的控制器相比,提出的方法设计了一种无模型控制律,无需任何先验模型参数,可以更好地适应不同环境和船舶特性的变化,提高了协同追捕任务的鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199965.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表