一种非侵入式数模联动的控制系统故障检测方法
- 国知局
- 2024-08-01 00:13:22
本申请属于工业控制系统的故障预测,具体涉及一种非侵入式数模联动的控制系统故障检测方法。
背景技术:
1、多轴运动控制系统是一种多个执行机构协同以实现机械运动部件位置、速度、姿态等精准控制为目的工业控制系统,其在激光雕刻、印刷、纺织等离散制造业领域有着广泛的应用。多轴运动控制系统的组成通常包括传感器、运动控制与驱动器、电机、传动机构和机械负载。在生产加工过程中,任何关键部件的故障或失效会影响多轴运动控制系统的动态性能,导致运动轨迹偏离预期控制效果,造成控制精度的下降和产品的报废,严重时会造成设备停机、设备损坏和人员伤亡等恶劣后果。因此,研究多轴运动控制系统的故障检测方法,对于及时发现潜在故障、精确分类故障以及指导制定维修策略,减小企业维修成本和提高生产效率具有重要的工程实践意义。
2、为了确保系统具有高精度的运动控制性能,闭环控制技术被广泛应用于多轴运动控制系统,其在提升系统动态性能的同时增加了系统的复杂性。具体来说,即使微小的故障也会在闭环控制系统中得到进一步的传递和放大,给系统精确故障诊断与隔离带来巨大挑战。现有的多轴运动控制系统故障检测方法主要可分为基于信号分析、基于运动学/动力学模型和基于数据驱动的方法。
3、其中,基于信号分析的方法认为闭环控制系统的故障最终会反映在系统的输出信号上,可以通过监测系统输出的时间序列并运用频谱分析、希尔伯特黄变换、经验模态分解、小波包分解等技术,提取与故障敏感的频域、时-频域特征,以实现多轴运动控制系统的故障诊断。但是,基于信号分析的方法在处理非平稳、非线性的信号上存在局限性,且被监测序列易受到工业现场的复杂工况和不确定的外部环境的干扰,使得基于信号分析方法的故障诊断精度较低,特别是难以识别微弱的早期故障信号。基于模型的方法主要建立在残差分析的基础上,根据残差生成方式的不同可以分为基于等价空间、基于参数估计和基于状态估计方法,其通过机理分析或实验建模的方式获得闭环控制系统的运动学/动力学模型,并计算模型输出估计值与量测值的残差信号完成故障诊断。然而,多轴运动控制系统存在固有的非线性、轴与轴之间的机械耦合性和多轴同步控制算法的强耦合性,在实际应用中往往难以被精确建模,进而限制了基于模型方法的进一步应用和推广。
4、此外,传感器技术和计算机技术的发展为基于数据驱动的故障检测方法提供了大量带有标签的状态监测数据,使得具有学习能力的深度神经网络方法迎来了新的发展机遇。虽然,基于数据驱动的方法在众多工业个性化案例中展现了其高精度的故障检测性能、不依赖于精确的系统建模和相对较低的学习门槛等巨大优势,但其本质的“黑盒模型”带来的不可解释性、模型参数存在难以移植问题和需要大规模的带标签训练数据使得其难以在工业领域获得大规模的应用。
技术实现思路
1、本申请的目的是提供一种非侵入式数模联动的控制系统故障检测方法,通过获取控制系统内置传感器数据,结合数据驱动方法在处理带有非平稳、非线性特性的多源传感器信息和基于概率生成模型在量化不确定性、揭示隐变量间复杂关系的各自优势,以克服现有单一基于数据驱动的故障诊断方法缺少可解释性和单一基于系统模型驱动的故障诊断方法因难以精确建模而存在诊断精度差的问题。
2、为了实现上述目的,本申请技术方案如下:
3、一种非侵入式数模联动的控制系统故障检测方法,包括:
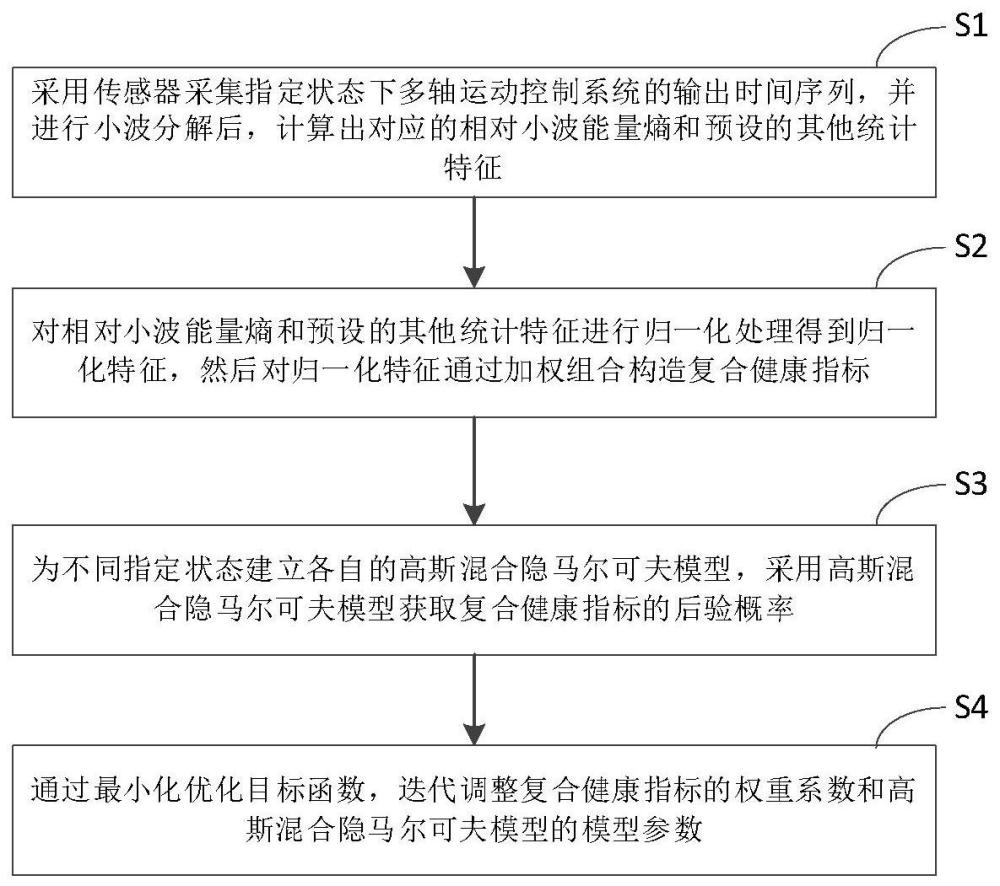
4、采用传感器采集指定状态下多轴运动控制系统的输出时间序列,并进行小波分解后,计算出对应的相对小波能量熵和预设的其他统计特征;
5、对相对小波能量熵和预设的其他统计特征进行归一化处理得到归一化特征,然后对归一化特征通过加权组合构造复合健康指标;
6、为不同指定状态建立各自的高斯混合隐马尔可夫模型,采用高斯混合隐马尔可夫模型获取复合健康指标的后验概率;
7、通过最小化优化目标函数,迭代调整复合健康指标的权重系数和高斯混合隐马尔可夫模型的模型参数。
8、进一步地,所述预设的其他统计特征包括脉冲指数、整流平均值、标准差、裕度指数、峭度因子和峰峰值。
9、进一步地,所述指定状态包括正常状态、漂移偏差状态、固定偏差状态、精度下降状态、部分失效状态和齿轮磨损故障状态。
10、进一步地,所述传感器包括力矩传感器、位移传感器和速度传感器。
11、进一步地,所述通过加权组合构造复合健康指标,采用如下公式:
12、
13、其中,wg,r表示第r类状态的第g个特征对应的权重系数,hg,r(k)表示采样点k下第r类状态的第g个归一化特征,g表示归一化特征的数量。
14、进一步地,所述通过最小化优化目标函数,迭代调整复合健康指标的权重系数和高斯混合隐马尔可夫模型的模型参数,包括:
15、构造第r类指定状态的优化目标函数j(wr):
16、
17、其中,表示在时间τ处的实际标签,pr(τ)表示后验概率,是权重系数之和,η>0表示参数的上界,为滑窗后的样本总数;
18、在目标函数中引入惩罚项,将原始约束问题转化为无约束问题,即:
19、
20、其中,σ1,σ2是超参数,r表示指定状态的总数量;
21、使用梯度下降法最小化优化目标函数,求解得到复合健康指标的权重系数和高斯混合隐马尔可夫模型的模型参数。
22、与现有技术相比,本申请的优点在于:提出了一种基于数据-模型交互的故障检测方法,通过设计带有多特征融合权重范围罚函数的全局优化目标函数,使得经过数据驱动方法提取得到的故障敏感特征与经过模型驱动方法建立的概率生成模型在故障诊断任务下得到了高效协同。区别于现有基于振动信号等外部传感信号的故障诊断方法,从非侵入数据获取的视角训练了故障分类器,即仅采用控制系统本身内置传感器信号实现系统故障的精准分类,降低系统故障诊断任务对于额外传感器部署的依赖。本申请技术方案故障分类精度高、可解释性强,且无需部署额外的传感器。
技术特征:1.一种非侵入式数模联动的控制系统故障检测方法,其特征在于,所述非侵入式数模联动的控制系统故障检测方法,包括:
2.根据权利要求1所述的非侵入式数模联动的控制系统故障检测方法,其特征在于,所述预设的其他统计特征包括脉冲指数、整流平均值、标准差、裕度指数、峭度因子和峰峰值。
3.根据权利要求1所述的非侵入式数模联动的控制系统故障检测方法,其特征在于,所述指定状态包括正常状态、漂移偏差状态、固定偏差状态、精度下降状态、部分失效状态和齿轮磨损故障状态。
4.根据权利要求1所述的非侵入式数模联动的控制系统故障检测方法,其特征在于,所述传感器包括力矩传感器、位移传感器和速度传感器。
5.根据权利要求1所述的非侵入式数模联动的控制系统故障检测方法,其特征在于,所述通过加权组合构造复合健康指标,采用如下公式:
6.根据权利要求3所述的非侵入式数模联动的控制系统故障检测方法,其特征在于,所述通过最小化优化目标函数,迭代调整复合健康指标的权重系数和高斯混合隐马尔可夫模型的模型参数,包括:
技术总结本发明公开了一种非侵入式数模联动的控制系统故障检测方法,采用传感器采集指定状态下多轴运动控制系统的输出时间序列,并进行小波分解后,计算出对应的相对小波能量熵和预设的其他统计特征,然后通过加权组合构造复合健康指标,为不同指定状态建立各自的高斯混合隐马尔可夫模型,采用高斯混合隐马尔可夫模型获取复合健康指标的后验概率。通过最小化优化目标函数,迭代调整复合健康指标的权重系数和高斯混合隐马尔可夫模型的模型参数。本发明技术方案故障分类精度高、可解释性强,且无需部署额外的传感器。技术研发人员:吴麒,张宝康,张文安,仇翔,陈威,刘嘉帅,顾曹源,薛洪锴受保护的技术使用者:浙江工业大学技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240730/200072.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表