一种基于灰狼优化算法的AGV小车路径规划方法与流程
- 国知局
- 2024-08-01 00:14:49
本申请属于智能仓储运输,具体涉及一种基于灰狼优化算法的agv小车路径规划方法。
背景技术:
1、在电力设备物资智慧供应链中,电力设备物资仓库利用rfid智能识别技术与基于agv智能小车的移动机器人技术建立了智能仓储环境。通过对agv小车进行任务分配和路径优化,能够实现电力设备物资的高效入库和精准投放。
2、灰狼优化算法可以作为一种路径优化手段。在灰狼优化算法中,狼群个体狩猎时总会优先选择距离最近且最容易捕获的猎物。但在三维空间内如何利用灰狼优化算法计算最佳路径的同时,避免agv小车出现碰撞或超出边界,现有技术仍未给出完整的技术方案。
技术实现思路
1、本发明提供了一种基于灰狼优化算法的agv小车路径规划方法,能够在三维空间内给出agv小车的最佳移动路线,同时避免其发生碰撞和超出空间边界。
2、本发明的技术方案如下:
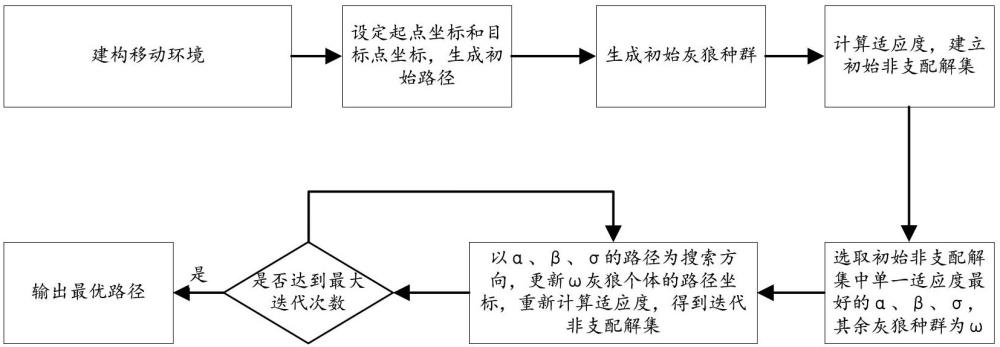
3、一种基于灰狼优化算法的agv小车路径规划方法,包括以下步骤:
4、s1)采用栅格法建构agv小车的平面移动环境,所述平面移动环境包括可行区域和不可行区域;对于不可行区域,对其进行尺度膨胀,且膨胀的尺度为agv小车的半径;
5、s2)在所述平面移动环境中设定agv小车的起点坐标和目标点坐标,并随机生成若干条初始路径;
6、s3)根据平面移动环境的边界,判断每条初始路径是否满足边界约束,剔除不满足边界约束的初始路径,并将所有满足边界约束的初始路径组成初始灰狼种群,初始灰狼种群中的灰狼个体表示各条初始路径;
7、s4)计算每个灰狼个体的适应度,得到初始灰狼种群的初始非支配解集;
8、所述适应度表示为:
9、
10、式中,表示第 i个灰狼个体的适应度;、、分别表示三个目标函数;
11、其中,;
12、式中,,其表示第 i条路径中 第j个路径点的三维空间位置;表示第 j个路径点和第 j+1个路径点之间形成的路径;
13、其中,;
14、式中, k表示不可行区域的集合;
15、;
16、其中,表示两点路径到不可行区域中心的距离; d表示碰撞威胁区;表示不可行区域的半径;表示不可行区域威胁成本惩罚系数;
17、其中,;
18、式中,表示与之间的水平转弯角,表示与之间的俯仰角; a1和 a 2表示水平转弯角和竖直俯仰角的惩罚系数;
19、s5)将初始非支配解集中单一适应度目标最好的三个灰狼个体分别标记为,,,其余的灰狼组成的狼群记为;
20、s6)以,,的路径为搜索方向,对中的灰狼个体的路径点坐标进行更新;当中的路径点坐标全部更新后,重新计算其适应度并得到迭代非支配解集;
21、s7)判断s6)是否达到最大迭代次数,若是,则输出最终的迭代非支配解集中的任一解作为最优路径;若否,则重复步骤s6)~s7)。
22、进一步地,所述步骤s1)中,将agv小车简化为质点,简化后的agv小车可穿过仅通过一共点相连的不可行区域。
23、进一步地,所述步骤s4)中,记 k为坐标轴正方向的单位向量,路径的计算式为:
24、;
25、的计算式为:
26、;
27、的计算式为:
28、;
29、式中,和表示第 i条路径中,第 j+1和第 j个路径点。
30、进一步地,所述步骤s6)中,中路径点坐标进行更新方法为,遍历,,中每一个路径点坐标,若在中匹配到不包括起点和终点在内的相同路径点,则从第一个对应相同的路径点开始,逐一替代后续的相同路径点以生成新路径;若在中未匹配到不包括起点和终点在内的相同路径点,则以步骤s2)中生成初始路径的方法随机生成若干新的路径,并组成新的灰狼种群。
31、由于采用了上述技术方案,本申请的有益效果如下:
32、1.本申请通过灰狼算法对agv小车进行路径规划,通过对agv小车移动环境进行三维建模形成智慧移动空间,结合灰狼算法能够实现更精确更可靠的移动路线。
33、2.本申请中的适应度包含多个代价目标函数,可以模拟灰狼种群在狩猎时的高效决策,逐步计算并筛选出最优路径。具体地,本申请通过路径长度、转弯惩罚和障碍物惩罚三个方面优化所计算的路径,逐步达到最佳路径选择。本申请在每一次的位置更新时,都对环境模型进行同步更新,从而避免了灰狼个体之间的碰撞和超出边界的情况,能够使agv小车精准到达目标点。
技术特征:1.一种基于灰狼优化算法的agv小车路径规划方法,其特征在于,
2.根据权利要求1所述的一种基于灰狼优化算法的agv小车路径规划方法,其特征在于,
3.根据权利要求2所述的一种基于灰狼优化算法的agv小车路径规划方法,其特征在于,
4.根据权利要求1所述的一种基于灰狼优化算法的agv小车路径规划方法,其特征在于,
技术总结本申请具体涉及一种基于灰狼优化算法的AGV小车路径规划方法,通过建构移动环境,设定AGV小车的起始坐标点和目标坐标点,采用灰狼优化算法,以三个目标函数组成适应度函数,迭代过程同步更新所有灰狼个体的位置,最终输出最优路径。本申请能够在三维空间内给出AGV小车的最佳移动路线,同时避免其发生碰撞和超出空间边界。技术研发人员:张凯,崔凌潇,范明阳,范富岭,徐宁,张海涛,赵彥涛,张志建,刘娜,姚圣平受保护的技术使用者:国网山东省电力公司德州供电公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200229.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表