一种基于不连续神经网络的无人机群同步控制方法
- 国知局
- 2024-08-01 00:22:19
本发明属于无人机群信息处理,尤其涉及一种基于不连续神经网络的无人机群同步控制方法。
背景技术:
1、近年来,无人机群体智能通常体现在集群行为中,无人机群系统的协同控制由于其广泛的应用前景近年来受到了广泛的关注,比如多无人机集群覆盖、机器人集群编队和无人车集群包围等等。无人机群系统的一致性跟踪问题作为无人机群系统协同控制领域的一个重要问题引起了众多学者的研究,其目的是设计一种控制方案使得所有无人机群与领导者的状态同步。
2、公开号为cn112198898a的中国发明专利公开了一种无人机群控制方法以及装置。其中,每个长机发送第一长机定位信号至多个僚机。当每个僚机接收多个长机发送的多个第一长机定位信号时,通过多个长机的位置对每个僚机的位置进行了定位。每个僚机基于多个第一长机定位信号,可以实现自身的高精度定位。每个僚机基于多个第一长机定位信号实时调控自身飞行姿态,以完成编队指令并保持编队形态。当其中一个长机发生故障时,每个僚机基于其他多个第一长机定位信号仍然可以继续进行自身的高精度定位,控制误差不会被逐级放大,避免了传统控制方法中长机出现故障导致的整个无人机群失控问题,提高了无人机编队控制系统鲁棒性。
3、另一项公开号为cn117742156a的中国发明专利公开了一种基于rbf神经网络的四旋翼无人机控制方法及系统,涉及无人机控制技术领域。本发明的技术要点包括:建立四旋翼无人机动力学及运动学模型;将四旋翼无人机动力学及运动学模型拆分为位置模型和姿态模型,并利用基于rbf神经网络的干扰观测器对位置模型和姿态模型中的模型不确定项和外界干扰进行逼近处理,以使实时观测的干扰估计误差趋近于零;利用反步控制理论,根据位置模型设计位置控制器,根据姿态模型设计姿态控制器;利用位置控制器和姿态控制器对四旋翼无人机进行运动控制。
4、上述现有技术中,没有考虑时间延迟对无人机群的影响,甚至随机时延更为常见,也没有考虑随机时延对无人机群的影响。随机时延会对无人机群同步控制造成干扰,这样会使系统性能变差,甚至响应系统无法与驱动系统同步。具有噪声相关项的随机系统已广泛应用于机械系统、电力系统、网络控制系统等领域。由于其广泛的应用,考虑随机系统的同步问题具有重要的现实意义。除了随机噪声干扰,在真实世界的神经网络的建模过程中,由于放大器的信号传输速度和开关速度有限,不可避免地会考虑时间延迟问题,这是振荡和不稳定性的来源。因此,时延神经网络的同步分析是现有技术中没有解决的技术问题。
5、研究神经网络的动力学行为,不可避免的就必须研究其同步问题。到目前为止,关于神经网络的同步问题产生了许多非常有趣的研究工作,包括渐进同步,指数同步以及伪同步等等。现有技术公开了利用自适应滑模控制实现神经网络的同步,然而收敛时间是随着时间无穷的推移,神经网络的误差变量才会收敛到原点。随着现代科技的发展,网络系统的时效性越来越重要,收敛速度也逐渐成为越来越需要考虑的重要指标之一。在现有的同步定义中,有限时间同步可以使得网络系统在有限的时间内实现同步,显著提高了收敛速度,且具有最佳的收敛速度和更好的抗干扰性能。
6、为了实现不连续神经网络的同步,需要设计一些控制协议来达到控制目标。多种控制方案适用于基于不连续的神经网络,如自适应控制、滑模控制、反馈控制和采样数据控制。现有技术公开了一种有限时间神经网络同步控制器实现无人机群的同步,然而,这种控制策略是一种连续的控制策略,其并不适用于不连续神经网络的无人机群同步控制。
技术实现思路
1、为解决上述技术问题,本发明提出了一种基于不连续神经网络的无人机群同步控制方法,该控制方法由脉冲控制策略和有限时间控制策略组成,属于一种混合控制策略,通过这种混合的控制策略,对基于随机噪声干扰的时延不连续神经网络的无人机群进行脉冲有限时间同步控制,进一步的节省了控制能耗,节约成本,还大大缩短了无人机群的同步收敛时间,提高了网络的抗干扰能力。
2、为实现上述目的,本发明提供了一种基于不连续神经网络的无人机群同步控制方法,包括:
3、包括以下步骤:
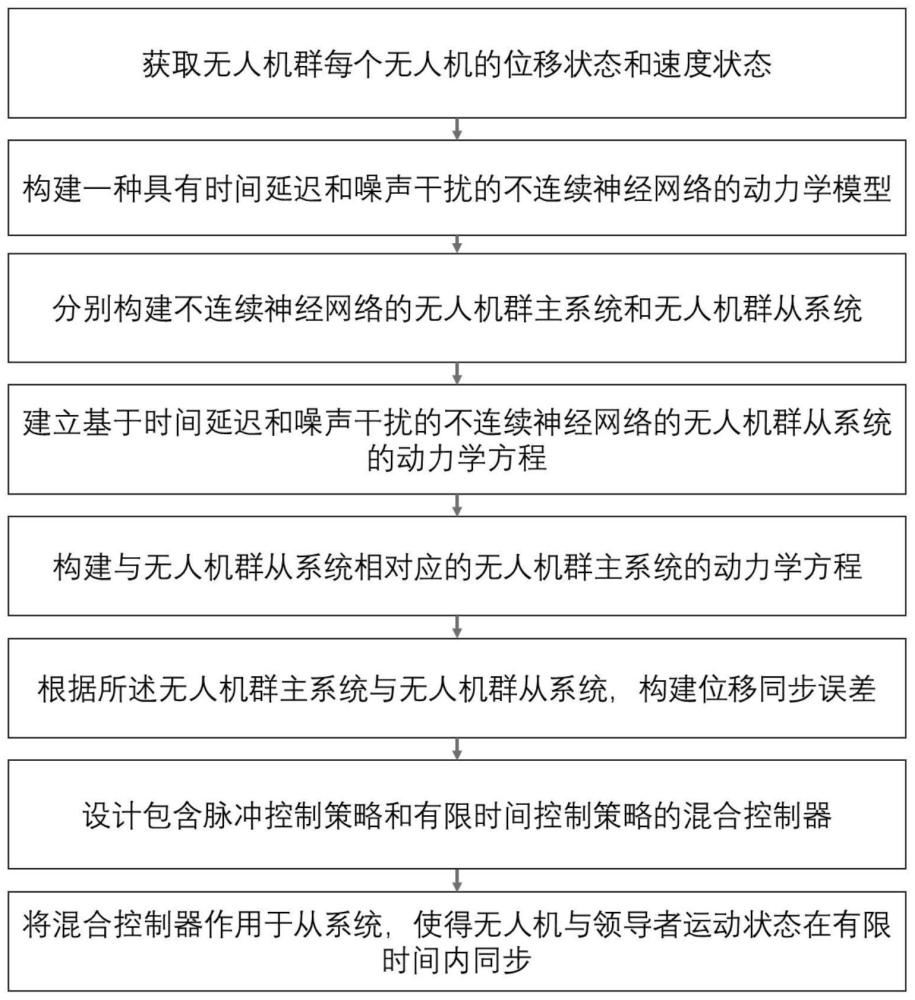
4、s1、获取无人机群每个无人机的位移状态和速度状态;
5、s2、构建一种具有时间延迟和噪声干扰的不连续神经网络的动力学模型;
6、s3、构建随机时延不连续神经网络的无人机群主系统和无人机群从系统;
7、s4、建立具有时间延迟和噪声干扰的不连续神经网络的无人机群从系统的动力学方程:
8、dσi(t)=[-dσi(t)+ak(σi(t))+bk(σi(t-τ))+ui(t)]dt+s(υi(t))dw(t)
9、其中,σi(t)表示第i个无人机在时刻t的位移状态,i=1,2,...,n,则dσi(t)是σi(t)的微分,表示第i个无人机在时刻t的速度状态,t表示大于等于0的时间,k(·)表示不连续的激励函数,ui(t)表示所述无人机群从系统中需要设计的无人机群同步控制器,s(·)表示非线性的噪声强度函数,w(t)表示一个标量布朗运动,τ表示时延系数,a,b,d表示对应维数的系数矩阵,υi(t)表示无人机和领导者无人机的误差函数;
10、s5、构建与无人机群从系统相对应的无人机群主系统的动力学方程:
11、dy(t)=[-dy(t)+ak(y(t))+bk(y(t-τ))]dt
12、其中,y(t)表示领导者无人机在时刻t的位移状态,则dy(t)是y(t)的微分,表示领导者无人机在时刻t的速度状态,a,b,d表示系统本身的对应维数的系数矩阵,k(·)表示不连续的激励函数,t表示大于等于0的时间,τ表示时延系数;
13、s6、根据构建的所述无人机群主系统与无人机群从系统,设定位移同步误差,并构建位移同步误差为:
14、υi(t)=σi(t)-y(t);
15、根据所述无人机群主系统和无人机群从系统,以及上述设定的位移同步误差,建立速度同步误差系统为:
16、
17、其中,k(υi(t))=k(σi(t))-k(y(t)),σi(t)表示第i个无人机的位移状态,k(·)表示不连续的激励函数,ui(t)表示控制协议,s(·)表示非线性的噪声强度函数,w(t)表示一个标量布朗运动,τ表示时延系数,a,b,d表示系统本身的对应维数的系数矩阵,υi(t)表示无人机和领导者无人机的位移误差函数,y(t)表示领导者无人机的位移状态;
18、s7、根据建立的速度同步误差系统,设计一种包含脉冲控制策略和有限时间控制策略的混合控制策略为:
19、ui=u1+u2
20、ui=-αsign(υi(t))i-χsign(υi(t))|υi(t)|q-psign(υi(t))|υi(t-τ)|
21、
22、其中,α,χ,p都是大于零的常数,sign(·)表示符号函数,q表示小于1的正常数,qk表示脉冲强度系数,δ(·)表示狄拉克函数,ui(t)表示控制协议,i表示为相同维度的单位矩阵,α表示控制器参数,χ表示控制器参数,p表示控制器参数,t表示时间,tm表示第m时刻的脉冲,τ表示时延系数,υi(t)表示无人机和领导者无人机的位移误差函数;
23、所述有限时间的同步收敛时间为:
24、其中,v(t0)表示无人机群主系统和无人机群从系统初始位移误差状态,t0表示初始时间。
25、s8、根据所述混合控制策略同步控制无人机群的编队,并且实时获取无人机群每个无人机和领导者的位移误差状态,将无人机群每个无人机和领导者的位移误差状态输入进控制器模型中进行控制,使得无人机与领导者运动状态同步。
26、本发明技术效果:本发明公开了一种基于不连续神经网络的无人机群同步控制方法,通过该混合控制策略不仅可以节省无人机群的通信资源,而且可以大大的缩短无人机群最终同步的收敛时间;本发明提出的混合控制策略对于无人机一类遭受随机干扰和时延延迟影响的网络,有着较好的控制作用,使得本发明的无人机系统比其他控制策略的无人机系统具有更好的鲁棒性能和抗干扰性能。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200795.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表