一种基于小扰动稳定分析的风电虚拟惯性控制方法
- 国知局
- 2024-07-31 17:48:28
本发明属于风电控制领域,涉及一种基于小扰动稳定分析的风电虚拟惯性控制方法
背景技术:
1、风能是一种清洁的、潜力巨大的可再生能源。由于海上丰富的风能资源和当今技术的可行性,海洋将成为一个迅速发展的风电市场,随着海上风电场技术的发展成熟,风电必将会成为中国东部沿海地区可持续发展的重要能源来源。但是,传统的双馈风电系统是一个非线性动态网络,由于电力吞吐过程引起的双馈风电系统能量不平衡,会在短时间内对整个双馈风电系统产生较小的干扰。随着风电并网规模的逐步增大,风速波动等因素加剧了这一问题。因此,如何提高风电并网和参与电网调频过程中的小扰动稳定性,是本领域技术人员需解决的技术问题。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明提供一种基于小扰动稳定分析的风电虚拟惯性控制方法,用于提高风电并网和参与电网调频过程中的小扰动的稳定性。
2、为实现上述效果,本发明的技术方案如下:
3、一种基于小扰动稳定分析的风电虚拟惯性控制方法,包括以下步骤:
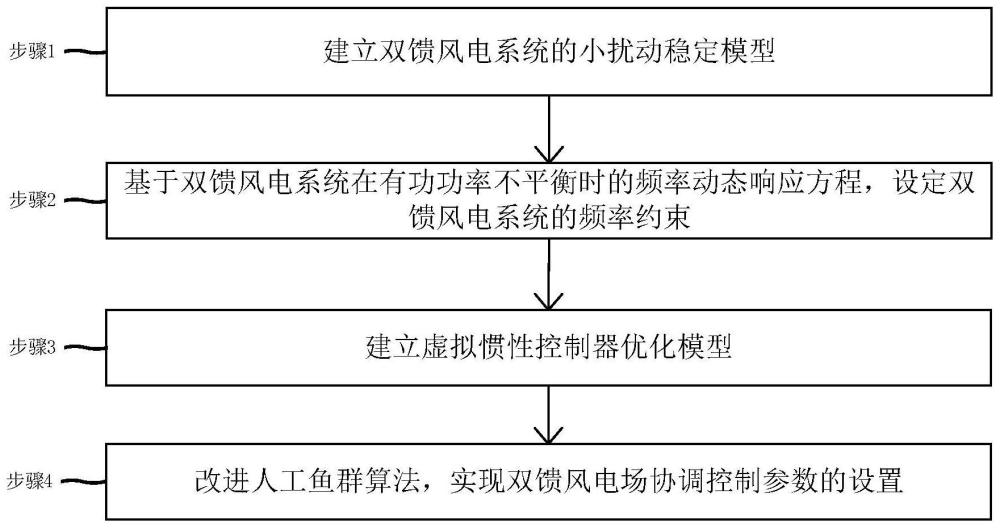
4、步骤1:建立双馈风电系统的小扰动稳定模型;
5、步骤2:基于双馈风电系统在有功功率不平衡时的频率动态响应方程,设定双馈风电系统的频率约束;
6、步骤3:建立虚拟惯性控制器优化模型;
7、步骤4:改进人工鱼群算法,实现双馈风电场协调控制参数的设置。
8、进一步的,步骤1具体为:
9、双馈风电系统的小扰动稳定模型为:
10、
11、cδx+dδu=0(2)
12、当
13、
14、
15、式中,ρ为空气密度,r为涡轮机半径,ω为涡轮机角速度,v为风速,λ为叶片最高速比,λ=ωr/v;β为叶片俯仰角,cp(λ,β)为涡轮的功率性能系数,t为转矩;
16、
17、将式(1)和式(2)结合,消去δu;得到虚拟惯性控制的动态方程:
18、
19、其中,状态矩阵as=(a—bd-1c)。
20、进一步的,步骤1之后还包括:
21、小扰动稳定性分析是求解状态矩阵as的特征值asλ=σ±jω,状态矩阵的特征值asλ作为双馈风电系统小信号稳定性分析的判断指标;σ表示振动的阻尼;
22、当σ<0时,双馈风电系统处于正阻尼振荡状态;当σ>0时,双馈风电系统处于负阻尼振荡状态,此时双馈风电系统无法收敛,导致双馈风电系统不稳定;ω表示双馈风电系统振荡的幅值,ω越大,表示系统振荡越严重;
23、双馈风电系统的特征值的阻尼比ζ表示为:
24、
25、特征值的阻尼比ζ是振荡的综合指标,用于反映振荡衰减的性能;当双馈风电系统发生振荡时,系统频率发生波动,虚拟惯性控制器控制双馈风电机组参与系统调频;
26、若双馈风电系统惯性响应与系统特征值之间的阻尼比中存在一个函数p作为控制参数,则:
27、max{(p)}→p(δp) (5)
28、即存在控制参数p对应于虚拟惯性控制器δp的输出参考有功功率,同时特征值的阻尼比达到最大值。
29、进一步的,步骤2所述基于双馈风电系统在有功功率不平衡时的频率动态响应方程,具体为:
30、考虑双馈风电系统的惯性响应和一次调频响应,得到双馈风电系统在有功功率不平衡时的频率动态响应方程:
31、
32、式中,h为系统的总惯量,δf是频率偏差,d是阻尼系数,δpg为风机虚拟惯量控制的有功补偿量,δpt为风机最大风能追踪功率,δpl为锁相环反馈的有功补偿量;忽略同步电机的惯量,仅考虑双馈异步风力发电机提供的惯量,即:
33、
34、式中,pw为双馈异步风力发电机的容量,f0=50hz;
35、频率偏差变化率在扰动发生后的瞬间达到最高值,此时频率偏差δf忽略不计,一次调频不响应,将式(6)转化为:
36、
37、进一步的,步骤2所述设定双馈风电系统的频率约束,具体为:
38、设定双馈风电系统与惯性有关的的频率约束方程:
39、
40、双馈风电系统能提供的最小惯性i为:
41、
42、与虚拟惯性控制相关的频率约束满足:
43、
44、进一步的,步骤3具体为:
45、考虑双馈风电系统的小扰动稳定模型,即满足双馈风电系统与惯性有关的的频率约束和特征值的阻尼比ζ,当双馈风电系统与惯性有关的的频率约束大于零时,选择特征值的阻尼比ζ作为优化目标;调整虚拟惯性控制器δp的输出参考有功功率,使特征值的阻尼比ζ最大化;根据小扰动稳定性要求,建立虚拟惯性控制器优化模型:
46、max j(ζ) (12)
47、
48、
49、进一步的,步骤3之后还包括:敏感性分析:
50、双馈风电系统特征值的阻尼比ζ、虚拟惯性控制器的参考有功功率输出值δp的灵敏度表示为:
51、
52、选择灵敏度值作为优化方向;当前时刻的灵敏度与前一时刻的灵敏度之差的绝对值满足最佳灵敏度条件时,则找到虚拟惯性控制器优化模型最优解;最佳灵敏度为:
53、
54、进一步的,步骤4具体为:
55、当δ=0.01,人工鱼群算法描述为:
56、改进人工鱼群算法的食物浓度函数y(x)(目标函数):
57、
58、人工鱼的个体状态定义为x=(x1,x2,…xn),x的值为虚拟惯性控制器的参考有功功率输出值δp在中心方向随机选取,满足δp-0.05≤x≤δp+0.05;
59、定义人工鱼当前位置的食物浓度函数为y,人工鱼个体之间的距离定义为dij=||xi-xj||,ψ是拥挤系数;基于改进人工鱼群算法的优化过程包括觅食行为和拥挤行为:
60、所述觅食行为:设当前人工小鱼儿的状态为xi,选择人工小鱼儿当前位置的双馈风力发电系统特征值的阻尼比ζ、虚拟惯性控制器的参考有功功率输出值δp的灵敏度作为计算下一时刻位置的前进方向,即人工小鱼儿的状态为xi+1:
61、
62、式中,η为人工鱼的感知距离,r是一个随机数(0<r<1);
63、所述拥挤行为:设置当前人工鱼状态为xi,探索当前附近的人工鱼伙伴数量n和中心位置xc,如果yc/n>ψyi,则表示中心有更多的食物且不拥挤,人工鱼向中心移动;反之,人工鱼进行觅食行为。
64、本发明技术方案的有益效果是:
65、本发明选取特征值的阻尼比作为优化目标,建立了小扰动稳定模型;基于双馈风电系统在有功功率不平衡时的频率动态响应方程,解决了由于电力吞吐过程引起的双馈风电系统能量不平衡的问题,在短时间内对整个双馈风电系统产生较小的干扰,同时设定双馈风电系统的频率约束,建立虚拟惯性控制器优化模型,保证系统频率的稳定性;改进人工鱼群算法,实现双馈风电场协调控制参数的设置。
本文地址:https://www.jishuxx.com/zhuanli/20240731/176720.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表