基于NDO的变换器主路改进超螺旋滑模控制方法
- 国知局
- 2024-07-31 17:50:12
本发明属于电力电子变换器,具体涉及基于ndo的变换器主路改进超螺旋滑模控制方法。
背景技术:
1、目前,sido buck变换器主路所采用的传统一阶滑模控制,传统滑模控制器的非连续性,在其控制下的系统会产生抖振现象,严重的抖振会对被控系统的稳定性造成严重影响,并且对系统硬件造成损害。所以,如何削弱传统滑模控制中的抖振问题成为研究重点。
技术实现思路
1、本发明的目的是提供基于ndo的变换器主路改进超螺旋滑模控制方法,解决了传统滑模控制中的抖振问题。
2、本发明所采用的技术方案是,基于ndo的变换器主路改进超螺旋滑模控制方法,具体按照以下步骤实施:
3、步骤1、改进超螺旋滑模控制器设计;
4、步骤1.1、确定sido buck变换器系统状态变量;
5、步骤1.2、基于超螺旋控制设计改进超螺旋控制;
6、步骤2、ndo设计。
7、本发明的特点还在于,
8、步骤1.1具体为:
9、设有如下非线性系统:
10、
11、式(1)中,x为状态变量;f(x)为关于x的函数;b(x)为系统增益;u为控制量;d为扰动;
12、选择线性滑模面s如下:
13、
14、式(2)中,e=x-xref,为状态变量误差值;c为大于零的正常数;
15、考虑sido buck变换器在工作时,存在外部扰动和负载扰动,所以根据式(1)得sido buck变换器系统为:
16、
17、式(3)中,d2为外部扰动;t为积分变量;ra0和ca为支路a中输出电阻和输出电容;va和vb分别为支路a和支路b输出电压;db和di分别为支路和主路开关管导通信号;il为电感电流;
18、定义主支路电压偏差ea1为:
19、ea1=va-varef (4)
20、式(4)中,varef为主支路参考电压;
21、根据式(3),定义ea2为:
22、
23、式(5)中,ea2为ea1的导数;
24、为了在存在外部扰动及负载扰动等不确定性的情况下,将主路电压va维持在期望值,为此,将式(3)所表示的系统状态变量转换为以下新形式
25、
26、式(6)中,为集总扰动。
27、步骤1.2具体为,
28、选取滑模面w为:
29、
30、式(7)中,c为正实数;
31、为了提高系统的鲁棒性,引入超螺旋滑模控制算法为:
32、
33、式(8)中,α和β为控制系数;sign为符号函数;λ1为超螺旋趋近律;
34、为了解决低幅抖振问题,用连续的sat(w)函数代替不连续的sign(w)函数,sat(w)函数表达式为:
35、
36、式(9)中,ε介于0~1之间;
37、改进后的超螺旋控制算法为:
38、
39、式(10)中λ2为改进的超螺旋控制律;
40、对式(6)求导并代入式(6)得:
41、
42、联立式(10)和式(11)求解可得:
43、
44、步骤2具体为:
45、在设计ndo之前,首先对式(6)做进一步表示,如下:
46、
47、式(13)中,a21=1-db;
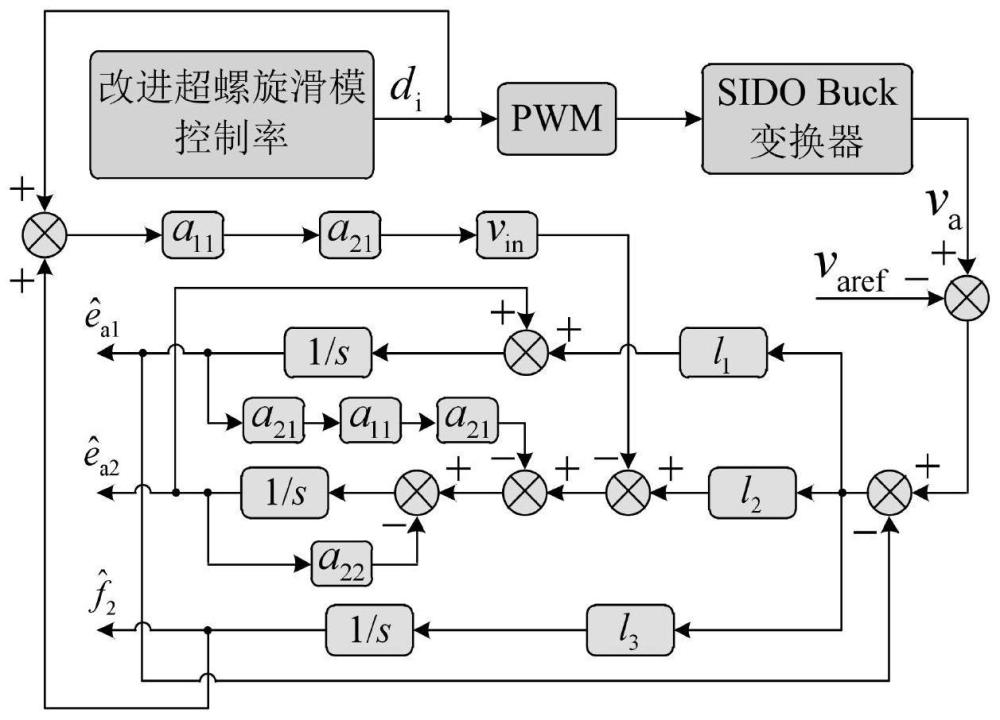
48、根据式(13)设计ndo为:
49、
50、式(14)中,和分别为ea1、ea2和f2的观测值;l1、l2和l3为观测器增益;
51、ndo用于估计状态ea1、ea2和扰动f1的实时值,然后将这些估计值用于控制信号中以消除其对系统性能的负面影响,即代入式(12)得:
52、
53、本发明的有益效果是:
54、本发明基于ndo的变换器主路改进超螺旋滑模控制方法,首先,引入阶数更高的超螺旋滑模控制,提高系统鲁棒性和减小系统抖振,为了进一步减小系统抖振,将超螺旋滑模控制中的不连续的sign(w)函数替换为连续的sat(w)函数;其次通过设计ndo对系统集总扰动进行估计,并将估计值作用于超螺旋滑模控制中,进一步提高系统的抗扰能力;不仅提升了系统的抗扰性能,还减少了变换器输出支路间的交叉影响。
技术特征:1.基于ndo的变换器主路改进超螺旋滑模控制方法,其特征在于,具体按照以下步骤实施:
2.根据权利要求1所述的基于ndo的变换器主路改进超螺旋滑模控制方法,其特征在于,所述步骤1.1具体为:
3.根据权利要求2所述的基于ndo的变换器主路改进超螺旋滑模控制方法,其特征在于,所述步骤1.1中,为了在存在外部扰动及负载扰动等不确定性的情况下,将主路电压va维持在期望值,为此,将式(3)所表示的系统状态变量转换为以下新形式
4.根据权利要求3所述的基于ndo的变换器主路改进超螺旋滑模控制方法,其特征在于,所述步骤1.2具体为,
5.根据权利要求4所述的基于ndo的变换器主路改进超螺旋滑模控制方法,其特征在于,所述步骤2具体为:
技术总结本发明公开了基于NDO的变换器主路改进超螺旋滑模控制方法,首先,引入阶数更高的超螺旋滑模控制,提高系统鲁棒性和减小系统抖振,为了进一步减小系统抖振,将超螺旋滑模控制中的不连续的sign(w)函数替换为连续的sat(w)函数;其次通过设计NDO对系统集总扰动进行估计,并将估计值作用于超螺旋滑模控制中,进一步提高系统的抗扰能力;不仅提升了系统的抗扰性能,还减少了变换器输出支路间的交叉影响。技术研发人员:皇金锋,李帅杰,张鹏超,胡波,董锋斌受保护的技术使用者:陕西理工大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240731/176869.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种防雨配电箱的制作方法
下一篇
返回列表