免调试架构下的高精度电机参数辨识方法
- 国知局
- 2024-07-31 17:50:42
本发明属于电机系统控制,具体涉及一种免调试架构下的高精度电机参数辨识方法。
背景技术:
1、永磁同步电机因其高效率、高功率密度和良好的动态性能而被越来越广泛的应用。为满足不同场景需求,控制器自整定,无位置传感器设计,安培最大转矩控制等先进控制方案被应用,而这些算法基本上离不开相应的电机参数,因此应在电机启动前获取参数。
2、然而在实际使用中,用户仅可以获得非常有限的初始电机数据,如标准铭牌上的电压、电流、额定转速和极数信息,而由于电机的电阻、电感等参数随电机运行工况非线性变化,通常无法精确给出,给电机控制和伺服系统免调试带来挑战。为提高辨识算法的通用性,其应兼顾安全性、快速性,短位移和精确性。
3、特定信号注入是参数辨识策略的必要手段。对于定子电阻辨识,须在电机稳定状态下计算电压和电流的商。为避免死区效应、寄生电容效应、脉动误差等对电阻辨识的影响,文献“"self-commissioning of permanent magnet synchronous machine drives atstandstill considering inverter nonlinearities,"feb2014.”对逆变器非线性进行辨识并对其补偿,并通过线性回归计算梯度可获得定子电阻。然而这进一步增加了辨识所需的时间,不符合快速免调试的需求。永磁同步电动机电感参数的辨识按计算方式大致可分为使用时域的数据或者在频域中进行。在文献“"offline parameter self-learningmethod for general-purpose pmsm drives with estimation error compensation,"nov.2019.”中,考虑了电感变化引起的交叉耦合效应和磁饱和效应,通过注入方波电压并对磁链进行微分,得到了各工况下的dq轴电感。然而该方法极大增加了参数辨识过程中的数据运算量和存储量,造成资源的消耗和时间成本的增加。且没有考虑不同工况下参数变化对电机驱控系统特性的影响,此外,基于d-q轴注入的电感辨识策略需在电流闭环下进行,但电流闭环控制器的设定和转子位置又依赖精确的电机参数,存在彼此之间互为前提的矛盾。相比之下,基于开环信号注入的辨识要简单得多,但在电机低阻抗的情况下,易触发过流保护等问题。然而其解决方案缺少对快速性和安全性的考量。为提高辨识的安全性和通用性,在文献“"spatial inductance estimation for current loop auto-tuningin ipmsm self-commissioning,"may 2020.”,提出一种可控正弦电压开环注入来估计空间电感图的办法。然而该自调节算法仅采用定步长调节幅频,难以快速精准达到所需工况。
4、除逆变器非线性外,还有众多非线性因素造成辨识误差的重要因素。数字控制系统不可避免的存在执行时滞和离散采样误差。同时随着注入信号频率的增大,集肤效应的影响也在加剧。此外,电机作为非线性强耦合系统,阻感参数变化敏感,直接影响系统鲁棒性。目前研究多通过在线参数辨识加控制器修正的策略,然而由于辨识和整定的结果存在一定的滞后,在线计算后再切换将为时已晚。
5、综上所述,为实现伺服驱动控制系统的高品质智能化控制,学术界和产业界针对电机特性参数辨识与伺服系统免调试策略开展了大量研究工作,目前尚存在以下问题:
6、1)目前电机参数辨识有开环注入和闭环注入两种策略。在电流闭环dq坐标系下进行时,辨识精度受控制器参数影响,而控制器参数的自整定又依赖电机精确参数,两者存在互为前提的矛盾关系。而在开环注入时,对于参数未知的机电系统,不合理的信号注入可能导致过流问题。目前的辨识算法过于单一,缺少参数不确定对辨识策略影响的考量,难以满足日益增长的需求,如何设计优异的辨识流程目前尚为空白。
7、2)电机作为非线性强耦合系统,温度、磁饱和、交耦效应、集肤效应等各种环境因素均影响着本体参数和系统特性,夹杂着逆变器、数字延时、离散采样、集肤效应等各非线性因素影响着系统性能和辨识质量。如何在统合考虑上述因素的同时实现快速、安全、精确的参数辨识成为又一难题。
技术实现思路
1、本发明为了解决上述问题,进而提供一种免调试架构下的高精度电机参数辨识方法。
2、本发明所采取的技术方案是:
3、免调试架构下的高精度电机参数辨识方法,包括:
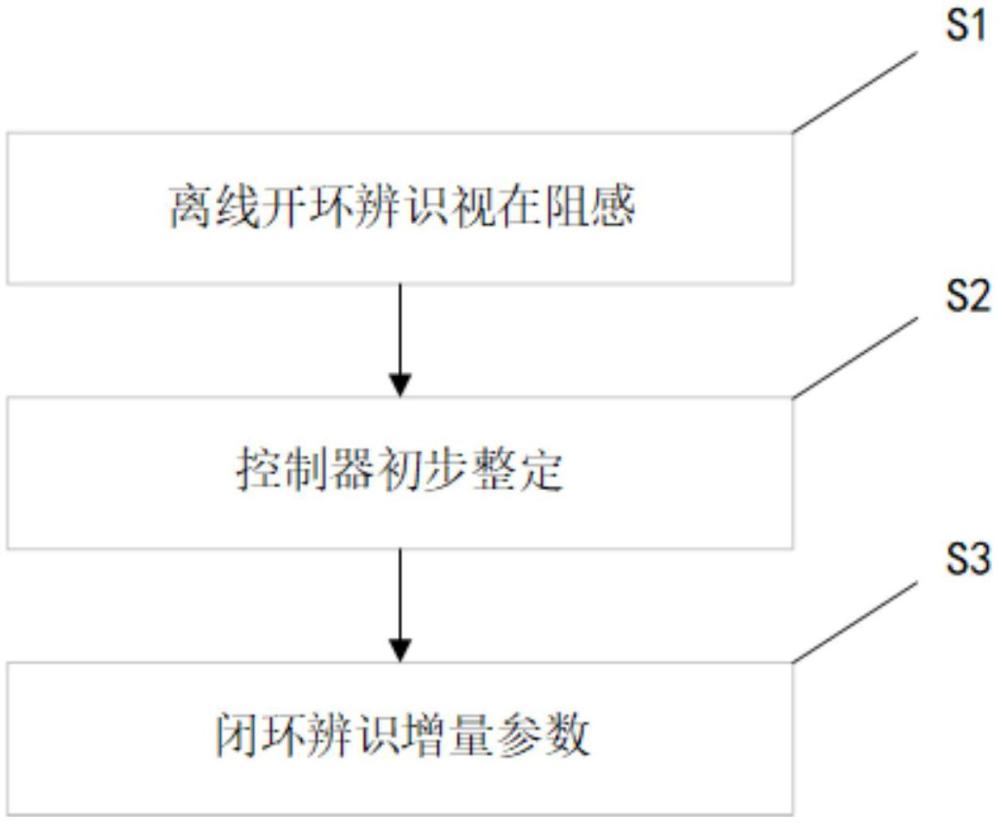
4、s1.离线开环辨识视在阻感;
5、s2.控制器初步整定;
6、s3.闭环辨识增量参数。
7、本发明与现有技术相比具有以下有益效果:
8、1、针对上述问题1),分析了不同工况下电机参数变化规律,结合其对系统特性的影响分析,考虑到对陌生电机的辨识以及后续的整定及控制,系统的安全稳定是设计的前提。从系统稳定出发,确立了系统的不稳定工况,并根据该工况设计了安全快速辨识流程,即:离线开环辨识视在阻感+控制器初步整定+闭环辨识增量电感。
9、2、针对上述问题2),在开环辨识中,分析了传统辨识计算的误差,并提出了变幅频注入开环辨识策略,可以有效减小延时、采样误差、逆变器非线性的影响。与此同时,为实现快速安全有效的注入,设计了一种自动搜索注入信号幅度和频率的算法。为提高后续辨识精度和控制性能,提供了一种高带宽电流控制器设计方法。在闭环辨识中,为提高电阻辨识的精度,通过在阶梯波注入时解算逆变器模型参数,无需额外注入即同时实现了电阻辨识和电压误差补偿,降低了辨识的时间和流程复杂度。分别分析了占空比对数字延时的影响和高频注入过程中的集肤效应,并在频率模型中分别对其补偿矫正,提高了辨识的精度。
10、3、本发明提供了一种在免调试框架下的高精度参数辨识技术,该策略考虑并很好地满足了实际工程应用中对安全性、快速性、普适性的要求。
技术特征:1.一种免调试架构下的高精度电机参数辨识方法,其特征在于:包括:
2.根据权利要求1所述的免调试架构下的高精度电机参数辨识方法,其特征在于,所述辨识方法的控制对象包括具有驱动电机和逆变器的机电一体化系统;建立所述控制对象的传递函数,包括:
3.根据权利要求1所述的免调试架构下的高精度电机参数辨识方法,其特征在于:所述s1中的离线开环辨识视在阻感,包括以下步骤:
4.根据权利要求1所述的免调试架构下的高精度电机参数辨识方法,其特征在于,包括:所述s2中使用模型法实现控制器的初步整定,包括以下步骤:
5.根据权利要求1所述的免调试架构下的高精度电机参数辨识方法,其特征在于:包括:所述s3中闭环辨识增量参数,包括以下步骤:
6.根据权利要求5所述的免调试架构下的高精度电机参数辨识方法,其特征在于:所述s31中按照如下公式建立逆变器非线性补偿环节:
7.根据权利要求5所述的免调试架构下的高精度电机参数辨识方法,其特征在于:所述s32中按照如下公式分别辨识和补偿zoh的影响:
8.根据权利要求5所述的免调试架构下的高精度电机参数辨识方法,其特征在于:所述s33中按照如下公式对由于集肤效应造成的电感辨识偏差进行补偿:
技术总结免调试架构下的高精度电机参数辨识方法,属于电机系统控制技术领域。本发明设计了安全快速辨识流程。即:离线开环辨识视在阻感+控制器初步整定+闭环辨识增量电感。本发明在开环辨识中,提出了变幅频注入开环辨识策略,可以有效减小延时、采样误差、逆变器非线性的影响。设计了一种自动搜索注入信号幅度和频率的算法。并为了后续闭环控制和辨识,设计了一种高带宽电流控制器。在闭环辨识中,通过在阶梯波注入时解算逆变器模型参数,无需额外注入即同时实现了电阻辨识和电压误差补偿,降低了辨识的时间和流程复杂度。分别分析了占空比对数字延时的影响和高频注入过程中的集肤效应,并在频率模型中分别对其补偿矫正,提高了辨识的精度。技术研发人员:徐殿国,赵俊宇,吴雨婷,张庆,王卫受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240731/176915.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表