一种基于改进型磁链观测器的永磁同步电机位置观测方法与流程
- 国知局
- 2024-07-31 17:55:41
本申请涉及电机控制,具体是一种基于改进型磁链观测器的永磁同步电机位置观测方法。
背景技术:
1、永磁同步电机凭借高效率、高扭矩密度、高功率密度等优势,被广泛应用于工业传动、电动汽车、家用电器等领域。在永磁同步电机的矢量控制系统中,实时获得高精度的转子位置信息是实现高性能控制的关键。因此,通常需要在电机上安装旋转变压器、编码器等转子位置传感器。然而,机械式位置传感器的安装会导致电机制作工艺难度和成本增加,并且传感器信号容易受到外界环节的干扰,降低了系统的可靠性。近年来,国内外众多学者、工程师针对永磁同步电机的无位置传感器控制开展了一系列研究,有效克服了机械式传感器的固有缺陷,逐渐应用于各类电机产品中。
2、永磁同步电机的无感控制方法主要有龙贝格观测器法、扩展卡尔曼滤波法、和滑模观测器法等,这些方法大多是通过观测电机的反电动势等基波信号来获取转子位置信息。但是,只有当电机达到一定转速后,反电动势才能够具有较大的幅值和良好的信噪比。而磁通的大小在电机速度为零时依然保持恒定,因此通过观测电机的磁链获取转子位置信息是一种更好的选择。传统的磁链观测器通常采用直接积分法对磁链进行积分,但直接计算电压、电流积分会带来较大的误差,通常还需要引入稳定的参考值进行积分误差的矫正。如果转子的位置估算存在初始相位误差,造成估算磁链整体平移,纯积分器的直流偏置和积分漂移会直接影响观测精度。因此,研究出一种能够消除磁链直流偏置和积分漂移的磁链观测方法十分必要。
技术实现思路
1、本申请的目的在于提供一种基于改进型磁链观测器的永磁同步电机位置观测方法,以解决上述背景技术中提出的技术问题。
2、为实现上述目的,本申请公开了以下技术方案:一种基于改进型磁链观测器的永磁同步电机位置观测方法,其特征在于,该方法包括以下步骤:
3、将永磁同步电机的磁链方程在α-β坐标系下表示为:
4、
5、其中,uα,uβ为定子电压,iα,iβ为定子电流,λα,λβ为电机的总磁链在α-β轴下的分量;rs为电机定子电阻;总磁链为:
6、
7、其中,电机总磁链包括永磁体磁链ψf和定子磁链,ld,lq为定子电感;
8、定义平均电感定义半差电感定义θe为电机的电角度;
9、则总磁链为:
10、
11、将总磁链分解为定子磁链和转子磁链在α-β坐标系下的分量,表达式为:
12、
13、定义有效磁链的表达式为:
14、
15、其中,id,iq为在d-q坐标系下的定子电流;
16、引入初始磁链的信息,有效磁链的表达式更新为:
17、
18、采用id=0的控制策略,则有效磁链更新为:
19、
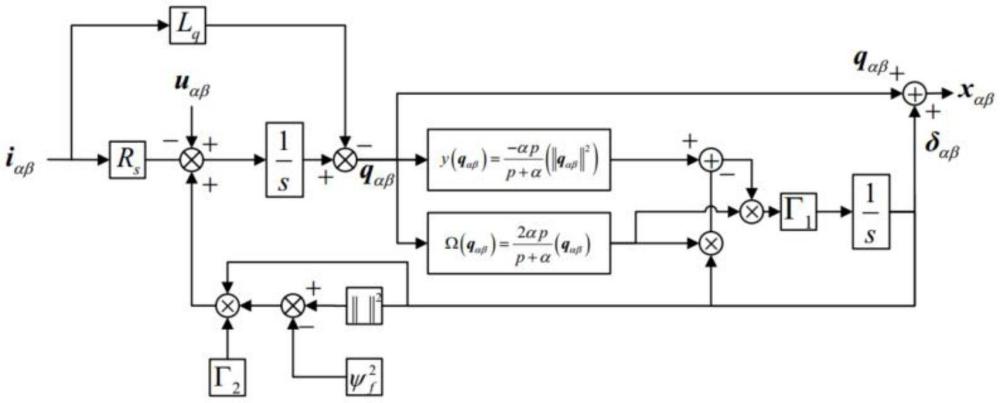
20、定义一个新的状态变量qαβ,其表达式为:
21、
22、其中,qαβ的积分初值为常数0,的积分初值取决于初始磁链的状态,qαβ和之间的关系为:
23、
24、其中,ηαβ为初始磁链的大小,ηαβ=λαβ(0)-lqiαβ(0);
25、的模和永磁体磁链常数ψf的大小相等,则:
26、||qαβ+ηαβ||2=||ψf||2
27、变换后得到变换后等式:
28、-||qαβ||2=||ηαβ||2+2qtαβηαβ-||ψf||2
29、对变换后等式中的等号两侧的多项式分别进行高通滤波,采用的滤波器为一阶高通滤波器,其结构为其中为微分算子。
30、滤波结果表示为:
31、y(qαβ)=ω(qαβ)ηαβ+ραβ(t)
32、其中,y(qαβ)和ω(qαβ)都是与变量qαβ相关的函数,表达式为:
33、
34、经过高通滤波后的ραβ(t)项呈指数衰减,且最终衰减至0,表示为:
35、
36、其中,c是一个大于0的常数,α决定衰减的速度;
37、定义初始磁链和估计磁链的误差其中为磁链估计误差;
38、当磁链观测的误差较小时,满足δαβ≈ηαβ,此时,将作为观测磁链误差的校正项;
39、以最小化误差为目标,建立梯度下降观测器,其中梯度算子为:
40、
41、得到改进型磁链观测器为:
42、
43、基于改进型磁链观测器提取转子位置信息。
44、有益效果:本申请的基于改进型磁链观测器的永磁同步电机位置观测方法,相较于传统的磁链观测器方法,对其纯积分环节进行了改进,解决了估算磁链通量无限制累积可能导致寄存器溢出的问题,并消除了纯积分器在系统中造成的不稳定影响。以及,相较于传统的磁链观测器方法,利用磁链的观测误差信息,以最小化磁链的观测误差为目标,采用梯度下降的计算方法,既解决了初始磁链带来的初始相位问题,又能够消除系统运行过程中产生的直流偏置。
技术特征:1.一种基于改进型磁链观测器的永磁同步电机位置观测方法,其特征在于,该方法包括以下步骤:
技术总结本申请公开了一种基于改进型磁链观测器的永磁同步电机位置观测方法,涉及电机控制技术领域,相较于传统的磁链观测器方法,对纯积分环节进行了改进,解决了估算磁链通量无限制累积可能导致寄存器溢出的问题,并消除了纯积分器在系统中造成的不稳定影响。同时,相较于传统的磁链观测器方法,利用磁链的观测误差信息,以最小化磁链的观测误差为目标,采用梯度下降的计算方法,既解决了初始磁链带来的初始相位问题,又能够消除系统运行过程中产生的直流偏置。技术研发人员:王孝洪,梁彧,连维钊,高孝君,徐楚彦受保护的技术使用者:佛山鸿威技术有限公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240731/177324.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表