一种并网逆变器的三矢量鲁棒模型预测控制方法
- 国知局
- 2024-07-31 18:00:24
本发明涉及逆变器并网控制,尤其涉及一种并网逆变器的三矢量鲁棒模型预测控制方法。
背景技术:
1、随着风力发电、光伏发电等可再生能源发电普及率的逐步提高,并网逆变器作为可再生能源发电系统并网的必备设备,其控制性能变得至关重要。这些装置所采用的控制算法对整个电力系统的完整性和效率有着深远的影响。因此,三相两电平并网逆变器的控制方法研究一直被认为是逆变器领域的重点研究之一。模型预测控制由于其固有的优点,包括快速的动态响应、简化的参数调整和简单的实现,在变流器系统中获得了较多的应用。
2、传统的单矢量模型预测控制方法在变流器系统应用较广泛。在单矢量模型预测控制之下,逆变器的输出电压直接在七个基本电压矢量中选取,其输出方向与幅值不可调节,由于在一个控制周期之内仅有一个电压矢量作用,导致控制精度不佳。双矢量模型预测控制是单矢量模型预测控制的扩展。它通过引入两个有效矢量,在控制周期内最小化输出电压与理想电压之间的偏差,减小输出电流谐波。然而,双矢量模型的输出电压覆盖范围有限,导致残余误差。为此,有些研究人员提出了三矢量模型预测控制作为更先进的替代方法,利用两个有效矢量和一个零矢量,实现了更广泛的电压覆盖范围。然而,三矢量模型中邻近矢量的选择仍然导致次优的电压扩展,影响输出电流,并且无法解决参数差异导致的控制误差问题。高温湿度等环境因素会引起电路元件参数的波动,使电流预测方程失准,影响控制效果。除此之外,上述的模型预测控制方法在模型参数失准的情况下,控制精度降低。
技术实现思路
1、针对上述现存技术的不足,本发明所要解决的技术问题是:改进现存的多矢量模型预测控制方法,提高控制精度,降低电流谐波含量;提高控制方法在参数失准情况下的鲁棒性和控制精度。
2、为了解决上述技术问题,本发明采用如下的技术方案。
3、一种并网逆变器的三矢量鲁棒模型预测控制方法,其特征在于,包括如下步骤:
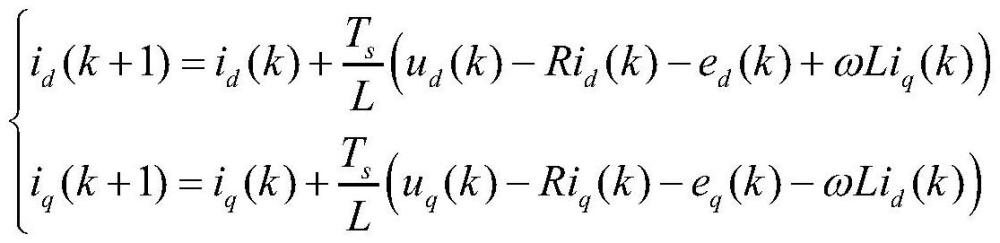
4、步骤s1、确定并网逆变器在两相旋转坐标系下的离散电流预测模型:
5、
6、式中,id(k+1)、iq(k+1)为旋转坐标系下d轴电流与q轴电流的下一时刻预测值;id(k)、iq(k)为当前时刻的d轴电流和q轴电流;
7、步骤s2、确定三矢量模型预测控制的离散电流预测模型:
8、
9、其中,t1、t2、t0分别为第一电压矢量、第二电压矢量与零矢量的作用时间;sd1、sd2、sd0为三个矢量作用下的d轴电流斜率;sq1、sq2、sq0为三个矢量作用下的q轴电流斜率。
10、步骤s3、确定鲁棒模型预测控制代价函数。根据代价函数进行计算,将得到的值最低的代价函数gco对应的电压矢量确定为实际工作的电压矢量;代价函数gco表示为:
11、gco=scogs+(1-sco)gtv
12、式中,sco为协调函数,gs为基于电流误差的函数,gtv为基于滑模理论的函数。
13、步骤s4、根据步骤1中的公式计算预测电流,将此值代入步骤3中的代价函数gtv,选取代价函数最小的电压矢量为第一电压矢量。
14、步骤s5、排出已经确定的第一电压矢量,其余电压矢量为备选,根据步骤2中的公式计算离散电流预测值,并代入步骤3中,将最低的代价函数gco值对应的电压矢量确定为第二电压矢量。
15、步骤s6、计算各矢量的实际作用时间,公式为:
16、
17、其中t1为第一矢量的作用时间,t2为第二电压矢量的作用时间,t0为零矢量的作用时间;其中d=sq0sd2+sq1sd0+sq2sd1-sq1sd2-sq2sd0-sq0sd1,ts为控制周期。
18、步骤s7、根据步骤6中的时间合成电压矢量,公式为:
19、
20、其中,ud1、uq1、ud2、uq2、ud0、uq0分别为第一个电压矢量、第二个电压矢量和零电压矢量在两相旋转坐标系下的分量;
21、步骤s8、将确定的第一个电压矢量、第二个电压矢量和零电压矢量分别按照对应的作用时间进行空间矢量脉宽调制。
22、进一步地,步骤s6中,判断t1、t2和t0是否在0~ts范围内:
23、若t1、t2和t0均在0~ts范围内,则直接将第一个电压矢量、第二个电压矢量和零电压矢量作用于当前控制周期;
24、若t1和t2在0~ts范围内,且t0未在0~ts范围内,则令t0=0后,将第一个电压矢量、第二个电压矢量和零电压矢量作用于当前控制周期;
25、若t1和t2中仅一个在0~ts范围内,且t0在0~ts范围内,则令未在0~ts范围内的t1或t2为0后,将第一个电压矢量、第二个电压矢量和零电压矢量作用于当前控制周期;
26、若t1和t2中仅一个在0~ts范围内,且t0未在0~ts范围内,则令未在0~ts范围内的t1或t2为0,且t0=0后,将第一个电压矢量、第二个电压矢量和零电压矢量作用于当前控制周期。
27、进一步地,步骤s3中,代价函数gco中的gs、gtv以及sco具体表示为:
28、gtv=(id(k+1)-idref)2+(iq(k+1)-iqref)2
29、gs=vd(ud-rid-ed+ωliq)+vq(uq-riq-eq-ωlid)
30、
31、其中,gs为基于滑模理论的代价函数方程,gtv为基于电流预测的代价函数方程,sco为协调方程,用于将gs与gtv进行协调输出。idref与iqref分别为dq轴的参考值,vd为d轴电流值与参考值的误差,vd=id(k+1)-idref,vq为q轴电流值与参考值的误差,vq=iq(k+1)-iqref,ω为电网角频率,h、k、σ为增益参数,e为检测的实际输出电流与理想电流误差值,ud和uq分别为逆变器在两相旋转坐标系下的输出电压分量。
32、为了实现三矢量预测控制与基于滑模理论的代价函数的协同作用,设计了协调函数。该协调函数可以综合三矢量预测控制和基于滑模理论的代价函数的优点。当并网电流误差较大时,鲁棒模型预测控制起着重要的作用;当电流误差较小时,三矢量预测控制起主要作用。
33、滑模控制具有固有的不变性和对系统参数变化的鲁棒性,使其成为增强各种控制问题鲁棒性的有效方法。在本节中,我们设计了基于滑模理论的成本函数,以赋予模型预测控制器在选择电压矢量时具有特定的鲁棒性。通常认为,当模型参数匹配良好时,系统倾向于选择具有最小成本函数的电压矢量。然而,当参数不匹配时,这种选择可能导致控制误差。应用基于滑模理论的模型预测控制,最优电压矢量发生变化。它不再仅由最小成本函数确定,而是由具有最高并网电流变化率的电压矢量确定,从而确保在参数不一致时为系统提供更合适的选择。这证明了在基于滑动模式的模型预测控制方法中不存在对系统参数变化的脆弱性,与传统模型预测控制方法相比提供了更优的鲁棒性。
34、综上所述,本发明具有如下优点:
35、1、提出了一种三矢量模型预测控制方法,旨在提高控制精度,减小电流波动,降低并网谐波含量。该方法通过在一个采样周期内同时使用两个有效矢量和一个零矢量,有效地提高了控制精度。
36、2、基于滑模理论构造了一种新型代价函数,可以减少对控制方法对于模型的依赖性。该方法利用滑模面构建了代价函数,确保了在模型参数不准确的情况下的鲁棒性。
37、3、提出了一种协调函数,将三矢量模型预测控制和基于滑膜理论的代价函数进行整合。在典型模型参数下,使用三矢量模型预测控制来控制并网逆变器,而在出现显著的并网电流误差时基于滑模理论的代价函数其作用,提高控制的鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20240731/177591.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表