一种兼容非标尺寸的晶圆寻边方法、系统及装置与流程
- 国知局
- 2024-07-31 18:23:14
本发明涉及晶圆,具体涉及一种兼容非标尺寸的晶圆寻边方法、系统及装置。
背景技术:
1、在晶圆搬运的过程中,寻边器是不可或缺的校准装置,由于晶圆在卡塞中存在位置偏差,以及平边或者豁口朝向的角度不一致,寻边器的主要作用是实现晶圆的中心校正,以及把平边或者豁口的朝向位置对准到指定的方向,为实现进一步的晶圆检测或加工提供必要条件。
2、在目前所有的搬运晶圆设备的应用中,所能实现搬运的晶圆尺寸都是标准尺寸,比如4寸片的标准直径100mm±0.5mm;6寸片的标准直径150mm±0.2mm;8寸片的标准直径200mm±0.2mm;如果出现尺寸超出这些规格的晶圆,比如直径是155mm或者153mm尺寸的晶圆将不能实现晶圆校正。
3、然而,有些特殊材质的晶圆价格昂贵,出于成本考虑,这种非标准尺寸的晶圆在部分半导体企业是普遍存在的,在这种情况下只能通过手动放片的方式进行人工处理,操作困难效率低下,甚至有损坏晶圆的风险。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种兼容非标尺寸的晶圆寻边方法、系统及装置,旨在解决现有技术中非标尺寸的晶圆需要手动放片后人工寻边,操作困难效率较低,并且容易损坏晶圆的问题。
2、本发明的第一方面在于提供一种兼容非标尺寸的晶圆寻边方法,所述晶圆寻边方法包括:
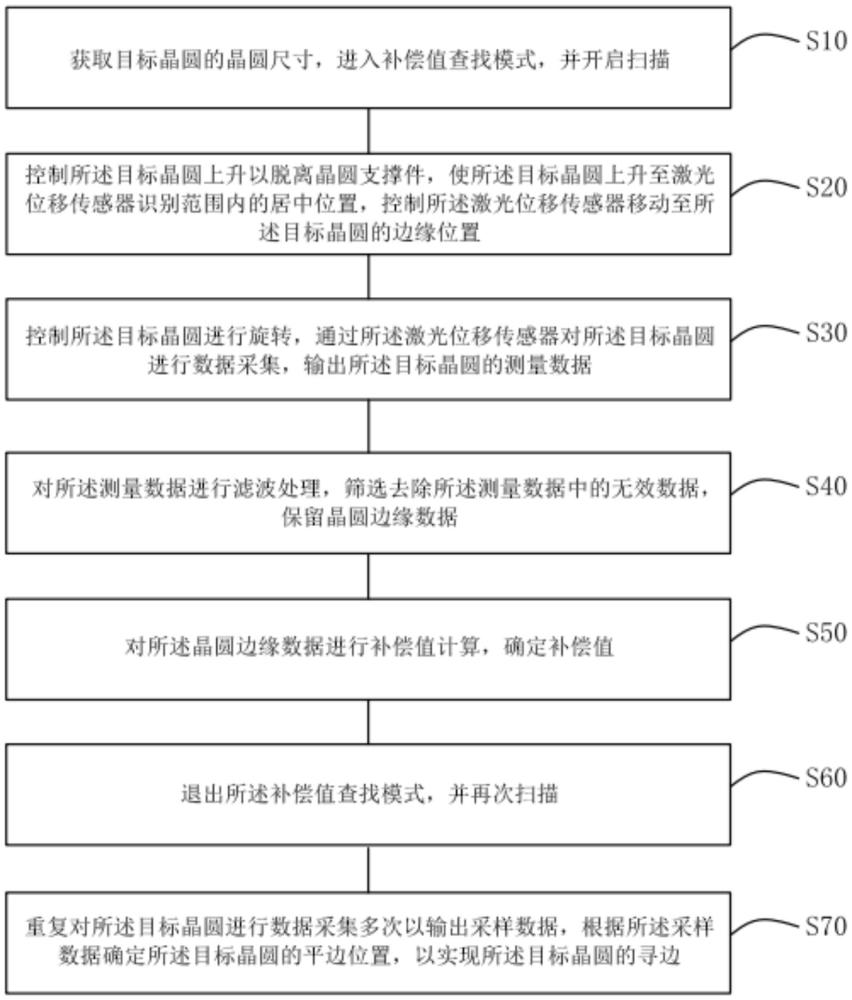
3、获取目标晶圆的晶圆尺寸,进入补偿值查找模式,并开启扫描;
4、控制所述目标晶圆上升以脱离晶圆支撑件,使所述目标晶圆上升至激光位移传感器识别范围内的居中位置,控制所述激光位移传感器移动至所述目标晶圆的边缘位置;
5、控制所述目标晶圆进行旋转,通过所述激光位移传感器对所述目标晶圆进行数据采集,输出所述目标晶圆的测量数据;
6、对所述测量数据进行滤波处理,筛选去除所述测量数据中的无效数据,保留晶圆边缘数据;
7、对所述晶圆边缘数据进行补偿值计算,确定补偿值;
8、退出所述补偿值查找模式,并再次扫描;
9、重复对所述目标晶圆进行数据采集多次以输出采样数据,根据所述采样数据确定所述目标晶圆的平边位置,以实现所述目标晶圆的寻边。
10、根据上述技术方案的一方面,对所述晶圆边缘数据进行补偿值计算,确定补偿值的步骤,具体包括:
11、根据所述晶圆边缘数据与所述晶圆尺寸中的晶圆直径,计算所述补偿值。
12、根据上述技术方案的一方面,补偿值计算的表达式为:
13、
14、式中,为补偿值,为晶圆直径,为晶圆边缘数据。
15、根据上述技术方案的一方面,重复对所述目标晶圆进行数据采集多次以输出采样数据,根据所述采样数据确定所述目标晶圆的平边位置,以实现所述目标晶圆的寻边的步骤,具体包括:
16、重复对所述目标晶圆进行数据采集多次以输出采样数据;
17、对所述采样数据进行最小二乘法拟合圆运算,根据所述采样数据与拟合圆数据的差值,确定所述目标晶圆中差值最大处为预估平边位置;
18、在所述预估平边位置的预设角度范围内利用拟合直线确定目标平边位置;
19、利用拟合圆计算晶圆平边两个运动轴向的偏移量,基于所述偏移量将所述目标晶圆移动至中心以完成晶圆寻边。
20、根据上述技术方案的一方面,对所述采样数据进行最小二乘法拟合圆运算,根据所述采样数据与拟合圆数据的差值,确定所述目标晶圆中差值最大处为预估平边位置的步骤,具体包括:
21、基于所述采样数据,转换得到所述目标晶圆中多个坐标点相对于晶圆中心的相对坐标;
22、根据多个所述坐标点相对于所述晶圆中心的相对坐标,对所有坐标点的相邻坐标点进行最短距离连线,输出坐标点连线;
23、对所述坐标点连线进行最小二乘法拟合,输出拟合圆;
24、根据所述采样数据与拟合圆数据的差值,识别所述目标晶圆中与所述拟合圆差值最大的位置,确定预估平边位置。
25、根据上述技术方案的一方面,在所述预估平边位置的预设角度范围内利用拟合直线确定目标平边位置的步骤,具体包括:
26、在所述预估平边的±10°角度范围内利用拟合直线确定目标平边位置。
27、根据上述技术方案的一方面,所述方法还包括:
28、若确定的目标平边位置未达到预设的寻边精度要求,则缩小角度范围重复进行扫描与拟合。
29、本发明的第二方面在于提供一种兼容非标尺寸的晶圆寻边系统,所述系统运用于上述技术方案当中所述的晶圆寻边方法,所述系统包括:
30、补偿查找模块,用于获取目标晶圆的晶圆尺寸,进入补偿值查找模式,并开启扫描;
31、晶圆升降模块,用于控制所述目标晶圆上升以脱离晶圆支撑件,使所述目标晶圆上升至激光位移传感器识别范围内的居中位置,控制所述激光位移传感器移动至所述目标晶圆的边缘位置;
32、晶圆旋转模块,用于控制所述目标晶圆进行旋转,通过所述激光位移传感器对所述目标晶圆进行数据采集,输出所述目标晶圆的测量数据;
33、数据滤波模块,用于对所述测量数据进行滤波处理,筛选去除所述测量数据中的无效数据,保留晶圆边缘数据;
34、补偿计算模块,用于对所述晶圆边缘数据进行补偿值计算,确定补偿值;
35、所述补偿查找模块还用于退出所述补偿值查找模式,并再次扫描;
36、晶圆寻边模块,用于重复对所述目标晶圆进行数据采集多次以输出采样数据,根据所述采样数据确定所述目标晶圆的平边位置,以实现所述目标晶圆的寻边。
37、本发明的第三方面在于提供一种兼容非标尺寸的晶圆寻边装置,所述晶圆寻边装置运用于上述技术方案当中所述的晶圆寻边系统,所述晶圆寻边装置包括:
38、移动校正机构,用于驱动目标晶圆进行升降与旋转;
39、激光位置传感器,用于对旋转的所述目标晶圆进行对射检测,以输出所述测量数据;
40、多个晶圆支撑件,用于对目标晶圆进行承载,所述移动校正机构设于多个所述晶圆支撑件的内侧;
41、以及控制机构,与所述移动校正机构、所述激光位置传感器分别通信连接,用于驱动所述移动校正机构的输出端进行升降或旋转,以及控制所述激光位置传感器对所述目标晶圆进行位置检测与识别。
42、根据上述技术方案的一方面,所述晶圆寻边装置还包括:
43、ocr字符识别机构,用于对确定晶圆平边的目标晶圆表面的镭刻标识进行字符识别。
44、与现有技术相比,采用本发明所示的兼容非标尺寸的晶圆寻边方法、系统及装置,有益效果在于:
45、在对目标晶圆进行寻边操作时,在进入补偿值查找模式后,将首先通过运动校正机构驱动目标晶圆上升至预设激光位移传感器识别范围的居中区域,驱动激光位移传感器移动至目标晶圆的边缘位置,然后控制目标晶圆进行旋转,在目标晶圆旋转的过程中,通过激光位移传感器实时的进行数据采集,输出测量数据并进行过滤,保留晶圆边缘数据,确定补偿值,重复采集多次后输出采样数据,对采样数据进行最小二乘法拟合,确定目标晶圆的平边位置,以实现对目标晶圆的寻边操作,则通过本发明所示方法对目标晶圆进行寻边,能够有效对非标尺寸的晶圆进行寻边,在寻边后可通过机械手自动放片,即可有效解决现有技术中非标尺寸晶圆只能通过人工寻边,使得操作困难效率较低,导致容易损坏晶圆的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240731/178961.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。