一种基于传递函数稳定性辨识的智能网联混合车队碰撞预测方法
- 国知局
- 2024-07-31 20:33:11
本发明属于智能交通,尤其涉及一种基于传递函数稳定性辨识的智能网联混合车队碰撞预测方法。
背景技术:
1、随着汽车智能化技术的发展,未来城市道路的交通流构成主体将逐渐从hv(humanvehicles,人驾车辆)向cav(connected and automated vehicles,网联自动驾驶车辆)过渡。在过渡过程中,道路交通流将主要以hv和cav构成的混合交通流形式存在。网联自动驾驶车辆与传统人驾车辆混行带来了新的安全问题:如何准确预测混行交通流场景中的追尾碰撞风险。随着物联网和汽车智能化技术的发展,路侧rsu设备可以获取并处理观测范围内的智能网联混合车队运行数据,因此通过利用混合车队动态信息实现混合车队碰撞风险预测是提升道路交通安全的重要任务。
2、现阶段针对交通流碰撞风险预测的研究,多从事故发生前的路段集计数据提取宏观交通流参数,采用交通流参数的描述性统计来建立不同交通流状态与碰撞风险的关系,但研究无法了解事故地点附近的确切交通变化;或是采用相邻两车的微观轨迹数据,构建安全替代指标进行碰撞风险预测,但研究无法反应交通流动态演化对碰撞风险的影响。因此,当前研究的结果并不能实现交通流中碰撞风险的提前预测。如何综合考虑交通流动态演化对碰撞风险的影响以及碰撞发生位置确切交通变化对于智能网联混合车队碰撞风险精准预测至关重要。
技术实现思路
1、本发明所要解决的技术问题是:提出一种基于传递函数稳定性辨识的智能网联混合车队碰撞预测方法,通过将道路交通流划分为车队的形式,基于智能网联混合车队的传递函数辨识车队状态,实现该车队碰撞风险预测,为道路交通安全管控提供理论依据。
2、本发明为解决上述技术问题采用以下技术方案:
3、一种基于传递函数稳定性辨识的智能网联混合车队碰撞预测方法,包括如下步骤:
4、s1、在智能网联混合车队中,构建传统人驾车辆跟驰模型和网联自动驾驶车辆跟驰模型,对跟驰行为进行分类并确定参数范围。
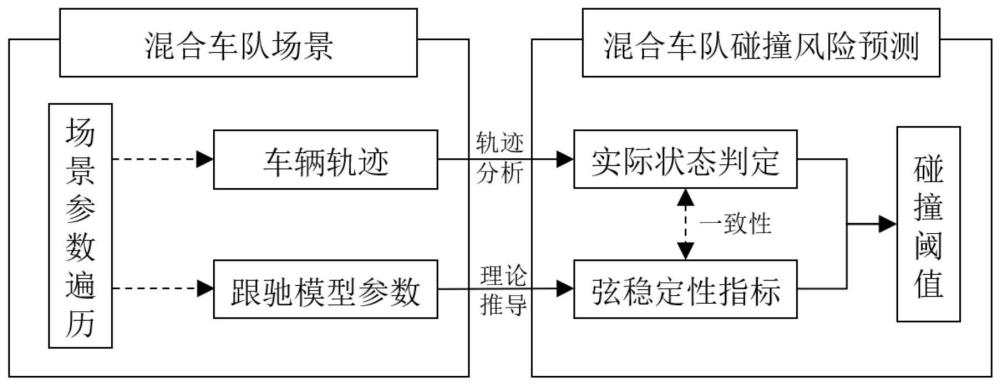
5、s2、设置智能网联混合车队场景参数,并将传统人驾车辆跟驰模型和网联自动驾驶车辆跟驰模型加载到微观交通系统中。
6、s3、遍历智能网联混合车队的关键参数,获取每组参数下的车队轨迹数据,同时计算出智能网联混合车队的传递函数及其对应的无穷范数。
7、s4、根据智能网联混合车队的无穷范数,划分该车队的理论状态,建立车队理论状态和实际状态的对应关系,构建智能网联混合车队碰撞预测模型。
8、s5、将获得的智能网联混合车队实际状态输入到智能网联混合车队碰撞预测模型中,预测其运行状态。
9、进一步的,步骤s1中,构建模型包括以下内容:
10、采用idm(intelligent driver model,智能驾驶员模型)构建传统人驾车辆跟驰模型,具体表达式为:
11、
12、
13、其中,ak(t+τhv)表示第k辆车在t+τhv时刻的加速度;τhv表示驾驶员反应延时;amax表示最大加速度;vk(t)表示第k辆车在t时刻的速度;vf表示自由流速度;sk(t)表示第k辆车在t时刻的车间间距;表示第k辆车在t时刻的期望车间距;s0表示静止安全距离;t表示安全时间间隔;b表示舒适减速度绝对值;vk-1(t)表示第k-1辆车在t时刻的速度,车辆k-1位于车辆k的前方。
14、采用cacc(cooperative adaptive cruise control,协作自适应巡航控制)模型构建网联自动驾驶车辆跟驰模型,具体表达式为:
15、
16、其中,ak(t+τcav)表示第k辆车在t+τcav时刻的加速度,gd和gv表示反馈增益,tc表示期望车头时距,τcav表示通信延时和执行延时的总和,η表示数据采样间隔。
17、跟驰行为分为四类:cav跟驰hv、cav跟驰cav、hv跟驰hv、hv跟驰cav;四类跟驰行为的参数范围分别为:
18、进一步的,步骤s2中,确定场景参数包括以下内容:
19、设置智能网联混合车队场景参数,包括路段长度lroad,总运行时间ttotal,状态更新时间步长δt;车辆基本参数包括速度区间[0,vmax]、加速度区间车辆长度lcar;智能网联混合车队规模为nplatoon;头车的扰动持续时间为tdisturbance;头车的扰动强度为ddisturbance;智能网联混合车队中hv的比例为phv,cav的比例为pcav。并在路侧布设检测装置,用于实时获取车辆轨迹信息。
20、进一步的,步骤s3中,遍历智能网联混合车队的关键参数包括以下内容:
21、智能网联混合车队规模头车的扰动持续时间头车的扰动强度cav的比例pcav∈[0,1]以及四种跟驰行为的参数。
22、对于每一组智能网联混合车队关键参数组合,通过分析该车队中每辆车的轨迹数据,得到该车队的实际状态statesim,分别为:稳定状态、失稳状态、碰撞状态。
23、进一步的,确定智能网联混合车队的实际状态statesim包括以下内容:
24、(1)计算智能网联混合车队中每辆车速度的最大波动幅度若最大波动幅度沿着该车队逐渐减小,则表示该车队处于稳定状态,则statesim=0:
25、ε1>ε2>…>εk>…>εn;
26、其中,k∈{1,2,,n}表示智能网联混合车队编号;n表示智能网联混合车队尾车的编号;vt表示智能网联混合车队运行时间内的速度;veq表示智能网联混合车队的平衡速度。
27、(2)当车辆间间距小于0,则表示该车队处于碰撞状态,则statesim=2。
28、(3)其余情况属于失稳状态则statesim=1。
29、进一步的,步骤s3中,计算传递函数及其对应的无穷范数包括以下内容:
30、根据跟驰行为的参数,智能网联混合车队中第k辆车与其前方相邻车辆的传递函数表示为:
31、
32、其中,gk(λ)表示第k辆车的传递函数;λ表示拉普拉斯变换运算符;fv表示跟驰行为对速度的偏导数;fδv表示跟驰行为对速度差的偏导数;fs表示跟驰行为对车间间距的偏导数;τ∈{τcav,τhv}表示cav或hv的延时。
33、根据不同类型的跟驰行为,传递函数中的fv、fδv和fs有两种计算方式:
34、(1)描述传统人驾车跟驰行为的idm对速度、速度差、车间间距的偏导数的表达式如下:
35、
36、其中,表示人驾车辆的平衡速度;表示人驾车辆的平衡车间距。
37、当表示hv跟驰hv;当表示hv跟驰cav。
38、(2)描述网联自动驾驶车辆跟驰行为的cacc模型对速度、速度差、车间间距的偏导数的表达式如下:
39、
40、当表示cav跟驰hv;当表示cav跟驰cav。
41、智能网联混合车队的头尾传递函数为该车队中除头车外的所有车辆传递函数的乘积,其表达式为:
42、
43、其中,t(λ)表示头尾传递函数。
44、计算智能网联混合车队的头尾传递函数对应的无穷范数,具体公式为:
45、
46、其中,j表示虚数单位,ω表示角频率,t(λ)∞表示头尾传递函数对应的无穷范数。
47、进一步的,步骤s4中,构建智能网联混合车队碰撞预测模型包括以下子步骤:
48、s401、根据智能网联混合车队的无穷范数,将该车队的理论状态statetheory划分为三种类型:
49、(1)如果t(λ)∞≤1,则statetheory=0,表示理论稳定状态;
50、(2)如果1<t(λ)∞<μ,则statetheory=1,表示理论失稳状态;
51、(3)如果t(λ)∞≥μ,则statetheory=2,表示理论碰撞状态;
52、其中,μ表示理论失稳状态与理论碰撞状态的阈值。
53、s402、将理论失稳状态与理论碰撞状态的阈值μ作为智能网联混合车队理论碰撞检测的阈值,设定预警阈值μwarning为理论碰撞检测阈值的2/3,用于碰撞风险的预警。
54、s403、最终的智能网联混合车队碰撞预测模型为:
55、
56、其中,1表示有碰撞风险,0表示没有碰撞风险。
57、进一步的,确定理论碰撞检测阈值包括以下内容:
58、步骤1、采用网格搜索法,以实际状态和理论状态一致性最大为目标确定每一组{nplatoon,tdisturbance,ddisturbance}条件下的理论失稳状态与理论碰撞的阈值
59、步骤2、采用最小二乘法拟合阈值与智能网联混合车队规模nplatoon、扰动持续时间tdisturbance、扰动强度ddisturbance,具体表达式为:
60、μ=f(nplatoon,tdisturbance,ddisturbance,c1,c2,…,cn);
61、其中,ci,i∈{1,2,…,n}表示待定参数。
62、进一步的,步骤s5中,将智能网联混合车队规模、头车的扰动持续时间以及扰动强度输入到智能网联混合车队碰撞预测模型中计算出阈值μ和μwarning,同时将智能网联混合车队的头尾传递函数的无穷范数||t(λ)||∞输入模型中,比较||t(λ)||∞和μwarning的大小,从而预测该车队的运行状态。
63、在实际交通中的应用流程如下:通过路侧检测设备获取实际道路中的智能网联混合车队的轨迹数据,采用遗传算法标定车队中每一辆车的跟驰模型,并计算混合车队头尾传递函数对应的无穷范数||t(λ)||∞;采用小波分析得到混合车队头车的扰动持续时间以及扰动强度,结合车队规模,确定当前碰撞阈值μ和碰撞风险阈值μwarning;若||t(λ)||∞≥μwarning,则确定该混合车队有碰撞风险。
64、进一步的,本发明还提出了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现前文所述的一种基于传递函数稳定性辨识的智能网联混合车队碰撞预测方法的步骤。
65、进一步的,本发明还提出了一种计算机可读的存储介质,所述计算机可读的存储介质存储有计算机程序,所述计算机程序被处理器运行时执行前文所述的一种基于传递函数稳定性辨识的智能网联混合车队碰撞预测方法。
66、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
67、本发明提出的基于传递函数稳定性辨识的智能网联混合车队碰撞预测方法,将交通流划分为若干车队,通过智能网联混合车队传递函数的无穷范数,确定该车队碰撞风险阈值,实现该车队碰撞风险的预测,克服了传统碰撞风险预测方法无法同时兼顾交通流动态演化对碰撞风险的影响以及碰撞发生位置确切交通变化的不足。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186843.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表