一种基于航迹符合性的无人机动态碰撞风险监控模型
- 国知局
- 2024-07-31 20:35:23
本发明涉及无人机动态碰撞风险监控模型,具体为一种基于航迹符合性的无人机动态碰撞风险监控模型。
背景技术:
1、随着近年来无人机逐渐融入国家空域系统,国内外无人机企业飞速发展,以及无人机进入的领域也越来越广,使无人机成为低空空域运行的主体。由于低空空域运行的无人机种类越来越多,无人机的机体性能不同,其位置保持能力差距较大,给监管部门划设航线,风险评估以及容量评估等造成不便。为了保证无人机在低空空域内安全有效的运行,对无人机在运行过程中的位置保持能力的研究至关重要。因此,通过提出航迹符合性的概念,对无人机在运行空域中与航线的三维偏差距离进行研究,进而对无人机的动态风险评估进行研究,确保无人机安全高效的运行。
2、在城市自由空域内,无人机动态风险评估对间隔标准确定以及容量评估等问题的关键,为解决这一问题,本发明通过对无人机历史数据进行分析,通过统计学方法确定无人机在运行空域内的航迹符合性,以此为基础建立动态碰撞风险监控模型,考虑无人机避撞系统的机动延迟时间,最终给出冲突解脱时机的建议时间。
3、因此我们对此做出改进,提出一种基于航迹符合性的无人机动态碰撞风险监控模型。
技术实现思路
1、为了解决上述技术问题,本发明提供了如下的技术方案:
2、本发明一种基于航迹符合性的无人机动态碰撞风险监控模型,包括以下步骤:
3、s1:提出航迹符合性的概念;
4、s2:对历史航迹数据进行正态回归和齐次检验,确定无人机三维航迹符合性;
5、s3:以无人机尺寸和三维航迹符合性为参数,构建无人机碰撞盒;
6、s4:构建无人机在任意相遇场景下的碰撞概率模型。
7、无人机的位置保持能力是无人机空中碰撞风险的决定要素,但无人机位置保持能力受无人机导航误差、控制偏差、作动和通信延迟等诸多因素影响,为了简化无人机安全监管,因此提出航迹符合性对无人机位置保持能力进行综合研究。航迹符合性是在无管制接入的前提下满足特定置信水平的无人驾驶航空器实际飞行轨迹与飞行计划的三维空间偏差。
8、为评估无人机航迹符合性,本发明拟对无人机航迹偏差数据进行正态回归和齐次检验。在无人机预定航线上建立了50个数据采集点,首先对采集到的航迹偏差数据进行正态检验,然后对通过正态检验的数据进行假设检验。在假设1中,自变量为飞行时间,因变量为三维位置偏差平均值;在假设2中,自变量为飞行时间,因变量为三维位置偏差方差。
9、本发明定义μi为第i次飞行实验样本数据(航迹偏差)的均值,бi2为第i次飞行实验样本数据(航迹偏差)的方差,因此,不同时间飞行实验对三维位置偏差平均值和方差影响的假设检验可以表示为:
10、(1)假设1:样本平均值假设
11、h0:μ1=μ2=…=μi;
12、h1:not all sample variances are the same.
13、(2)假设2:样本方差假设
14、
15、h1:not all sample variances are the same
16、通过上述检验,评估无人机在运行空域内的航迹符合性。
17、作为本发明的一种优选技术方案,以起飞机场基准点为坐标原点,正北方向为y轴,正东方向为x轴,z轴垂直于x、y所构成的平面,方向遵循右手定则,机体坐标系以飞机质点为0点,无人机机头朝向为x轴,y轴垂直于无人机对称面指向左侧,z轴垂直于x、y所构成的平面,方向遵循右手定则,综上所述,旋转矩阵p:
18、
19、式中,α为无人机的水平航迹角,β为无人机的垂直航迹角。
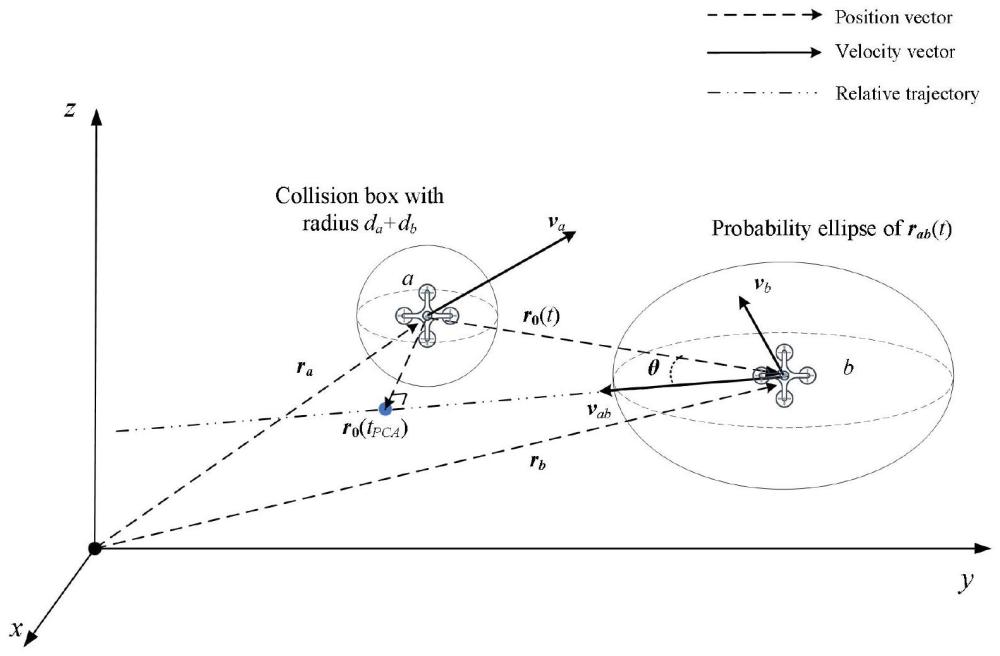
20、作为本发明的一种优选技术方案,对于两架飞机发生相遇的过程,假设无人机a,b在地面坐标系中t时刻的标称位置向量为ra(t),rb(t),则两机在初始时刻t0的相对标称位置向量为:
21、r0(t0)=rb(t0)-ra(t0) (2)
22、假设两架无人机a、b在机体坐标系下的位置误差向量为δra(t),δrb(t),则相对位置向量为:
23、rab(t)=rb(t)-ra(t)+pbδrb(t)-paδra(t)=r0(t)+pbδrb-paδra (3)
24、上式中rab(t)为两架无人机标准位置的相对距离向量,pa、pb为无人机a、b由机体坐标系转换到地面坐标系的旋转矩阵;
25、对于无人机的航迹符合性,无人机a、b三维偏差在机体坐标系下服从均值为η,标准差为λ的三维正态分布,即:
26、uav a:δra(t)~n3(ηa,λa) (4)
27、uav b:δrb(t)~n3(ηb,λb) (5)
28、式中,λ为三维协方差矩阵。
29、作为本发明的一种优选技术方案,由于无人机a,b的位置误差均服从三维正态分布,由正态分布性质可知,则无人机的相对位置rab(t)服从均值r0(t)+pbηb-paηb,标准差为paλapat+pbλbpbt的三维正态分布,即:
30、
31、则两架无人机在t时刻发生碰撞的概率为两架无人机的相对位置小于无人机碰撞盒半径的概率,即rab(t)<da+db:
32、
33、da和db分别为无人机a和b的碰撞盒半径。
34、作为本发明的一种优选技术方案,为确定自由飞行过程中两架无人机最小探测区域,需找到两架无人机相对运动到最近距离点,因此假设无人机a,b的在地面坐标系下的速度向量为va,vb,则可知相对速度向量vab为:
35、vab=vb-ua (8)
36、其特征在于,相对速度向量与相对标称位置向量r0(t)夹角θ为:
37、
38、作为本发明的一种优选技术方案,若cosθ>θ,即两架飞机相遇在最近点pca,若cosθ<0,则两架飞机之间并没有互相接近;
39、从几何关系可知,随时间变化的相对标称位置为:
40、
41、对公式11进行求导,并且令导数为0:
42、
43、可从上式中获得两架无人机到达最近点(point of the closest approach,pca)的时间tpca和相对最近标称距离:
44、
45、||r0(tpca)||=||r0(t0)||sinθ (13)
46、即可得到pca点的坐标,带入上述公式(7)中即可得到pca点处的碰撞概率pm。
47、如果pm(θ)>tlos,即两架在该角度不满足运行空域标准。因此在整个相遇过程中,不满足安全目标水平的时刻t可由下式得出:
48、
49、考虑到无人机检测到碰撞风险进行避撞措施需要机动延迟,因此无人机的自动避撞时间为:
50、twell-clear=t-tdelay (15)
51、本发明的有益效果是:本发明中,由于现在国家低空空域并没有系统的规则体系,因此现在无人机运行都是按照任务需求自由飞行。无人机大多数是在自由空域内飞行,一般都是点对点的飞行,无人机受到的约束较少,故其方向和速度都是不可确定的。由于无人机的位置不确定性,所以本发明随机生成参考无人机的位置点,然后以参考无人机为圆心,在半径为100m的球面上随机生成移动无人机的位置点,可计算出任何位置、任何条件下无人机的碰撞风险,提高了无人机飞行的安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187007.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表