-
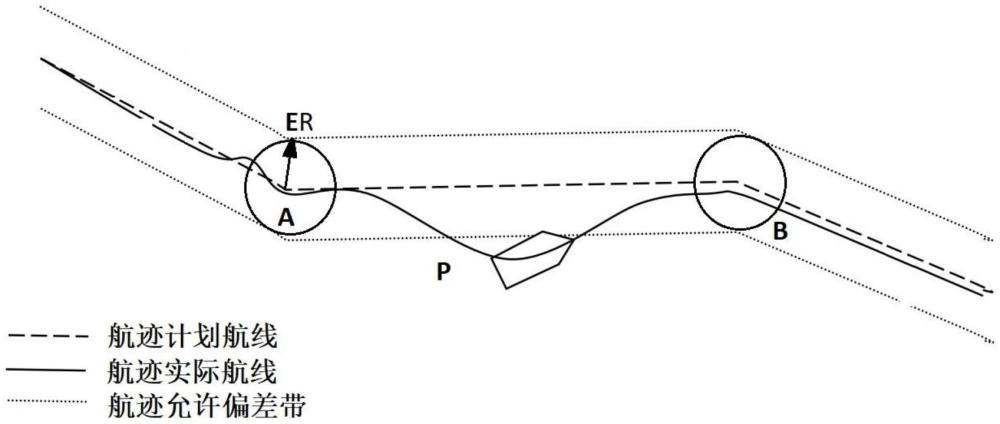
一种操舵仪航迹偏差计算方法与流程
本发明涉及船舶仪器设备,尤其涉及一种操舵仪航迹偏差计算方法。背景技术:1、航迹控制系统是实现船舶航行过程中的航向保持和航迹跟踪,控制船舶沿着计划航线航行的自动操舵系统。2、快速准确的计算出船舶的航迹偏......
-

一种基于航迹关联点迹的真实概率的航迹修正方法与流程
本发明涉及雷达数据处理,具体涉及一种基于航迹关联点迹的真实概率的航迹修正方法。背景技术:1、精确测量目标的距离和角度是毫米波雷达探测的基础,滤波跟踪估计算法则是目标跟踪的核心内容。由于毫米波雷达量测系......
-
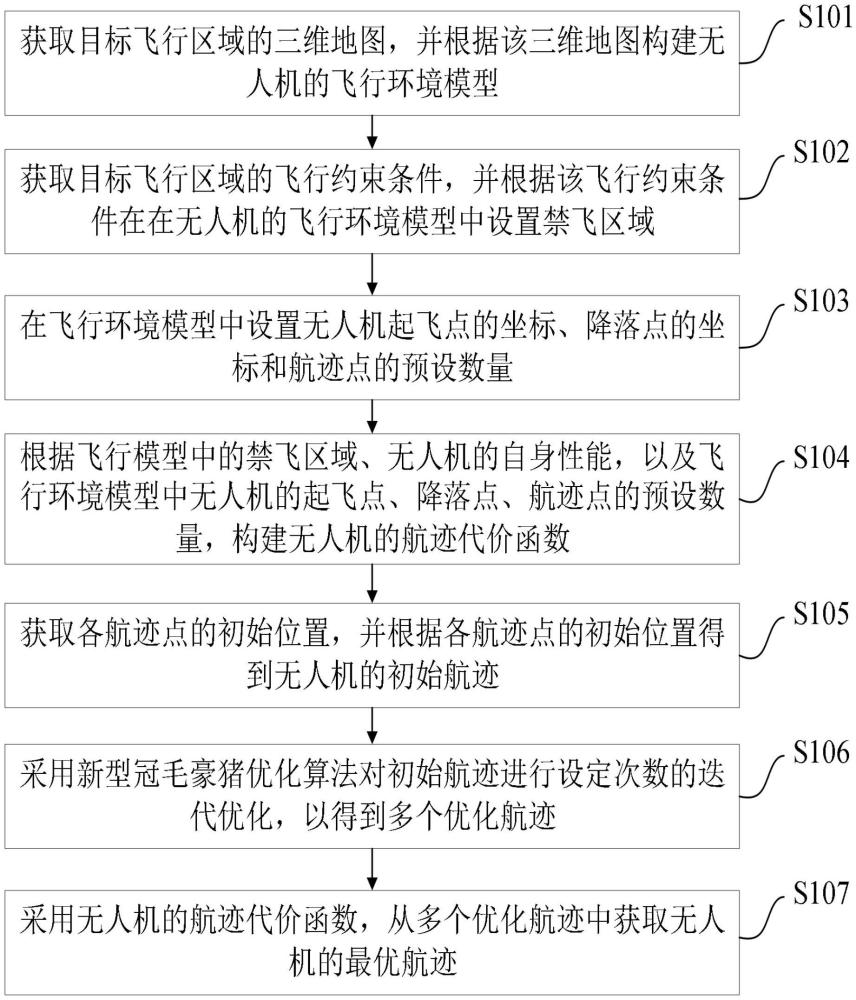
基于新型冠毛豪猪优化算法的无人机航迹规划方法
本发明涉及无人机控制,特别是涉及一种基于新型冠毛豪猪优化算法的无人机航迹规划方法。背景技术:1、无人机具有机动性强、可控性强和灵活性强的优点,被广泛应用于地质勘探、环境监测和电力巡检等工作场景中。在控......
-

一种基于多广度Transformer的航迹预测方法与流程
本发明涉及深度学习和航迹预测领域,特别是涉及基于多广度transformer的航迹预测方法。背景技术:1、航空运输作为现代社会的重要组成部分,对全球经济和人民生活产生着深远的影响。随着航空产业的不断发......
-
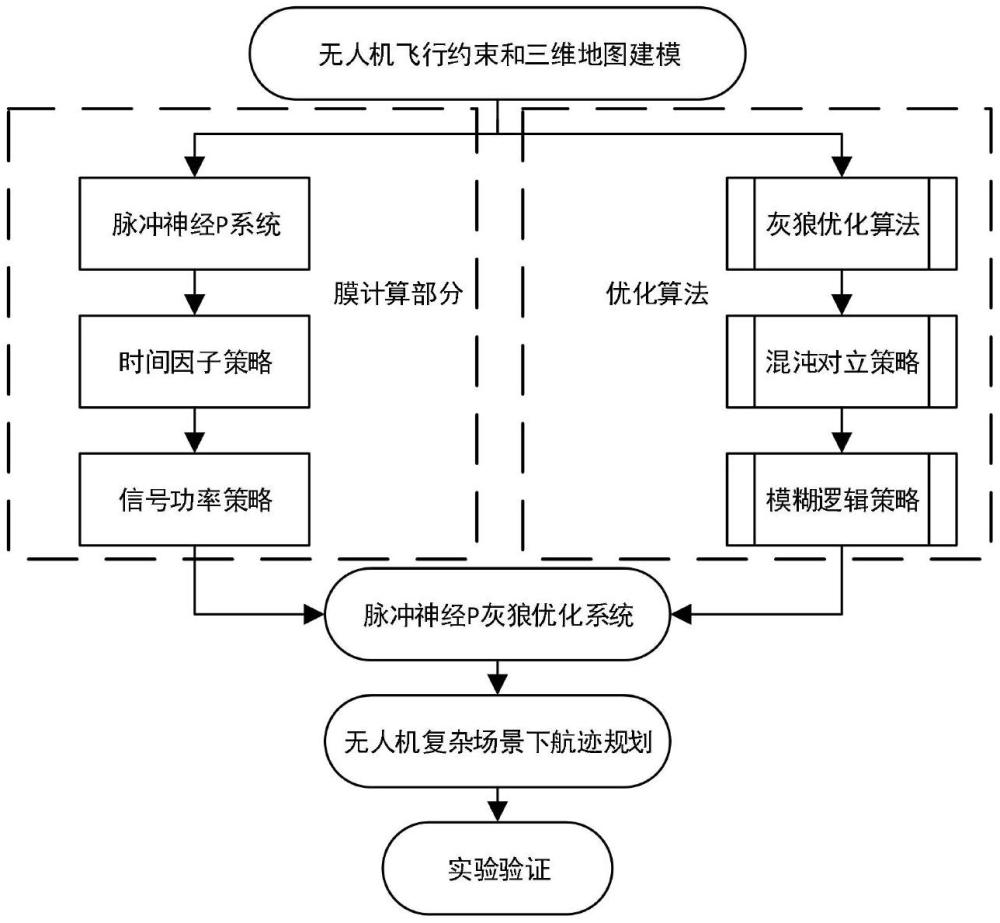
一种基于脉冲神经P系统的无人机三维航迹规划方法
本发明以自然计算、控制理论等多学科领域理论与技术融合为基础,依据各项研究内容之间的密切联系,开展基于脉冲神经p系统的多策略灰狼优化算法的无人机三维航迹规划。背景技术:1、随着5g通信,ai算法技术不断......
-

基于LightGBM的航迹自动起始判决方法与流程
本发明涉及雷达跟踪领域。背景技术:1、雷达探测距离远,发现目标多,对于航迹自动起始的要求也逐步提高。现有的航迹自动起始判决方法主要有m/n逻辑方法、hough变换方法等。m/n逻辑方法计算量较小,但在......
-
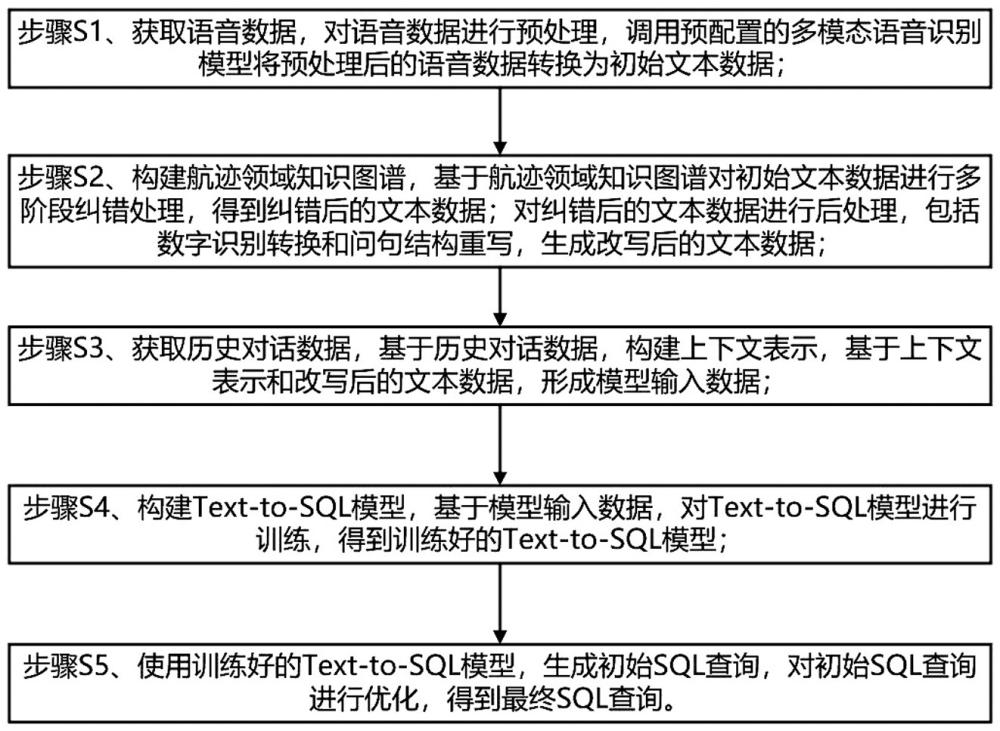
航迹领域知识库的大模型微调方法和场景适配系统与流程
本发明属于数据管理领域,公开了一种航迹领域知识库的大模型微调方法和场景适配系统。背景技术:1、text-to-sql是一种自然语言处理技术,旨在将自然语言查询转换为数据库查询语言,通常是sql(str......
-

基于相干点漂移的雷达与ESM航迹关联方法
本发明属于雷达信号处理领域,具体是一种基于相干点漂移的雷达与esm航迹关联方法,用于提高抗差关联的正确率和鲁棒性。背景技术:1、在对空中多目标监测的复杂场景下,常采用多个传感器协同工作来扩大观测范围,......
-
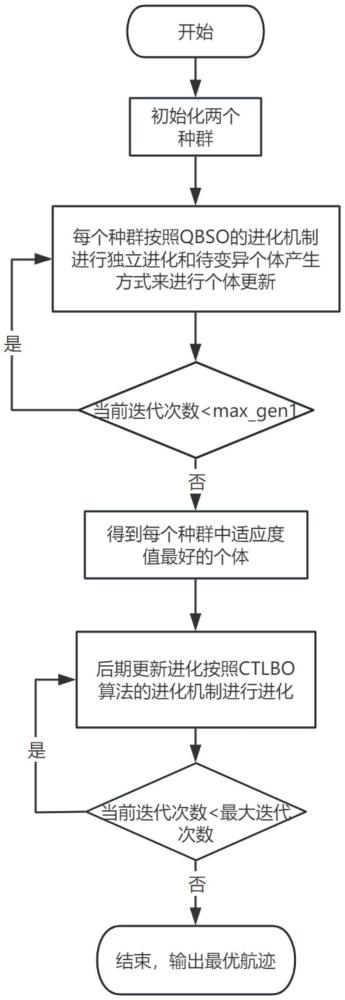
一种基于混合QBSO-CTLBO算法的无人机航迹规划方法
本发明涉及无人机航迹规划,尤其涉及一种基于混合qbso-ct lbo算法的无人机航迹规划方法。背景技术:1、目前,无人飞行器(unmanned aerial vehicle,uav)被越来越广泛地运用......
-
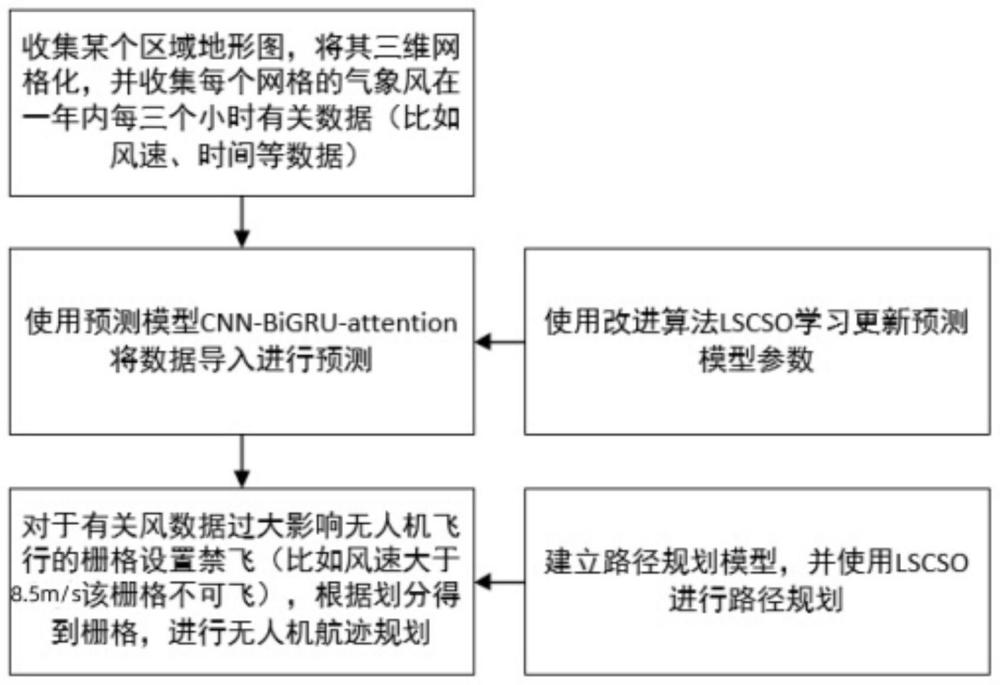
一种基于城市风的无人机航迹预测方法
本发明涉及无人机航迹规划,具体为一种基于城市风的无人机航迹预测方法。背景技术:1、小型无人机的重要安全问题之一是在恶劣天气条件下的安全操作,特别是在强风和湍流环境下;由于体积小,巡航速度慢,续航能力有......
-
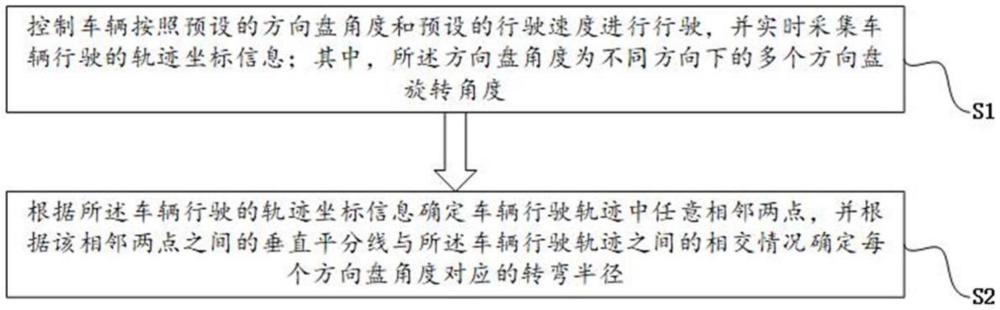
一种自动泊车航迹推算参数标定方法、系统、车辆及介质与流程
本发明涉及自动泊车航迹推算参数标定,特别是涉及一种自动泊车航迹推算参数标定方法、系统、车辆及介质。背景技术:1、目前装备自动泊车系统的车辆越来越多,但是自动泊车系统的性能参差不齐,因此在自动泊车开发阶......
-
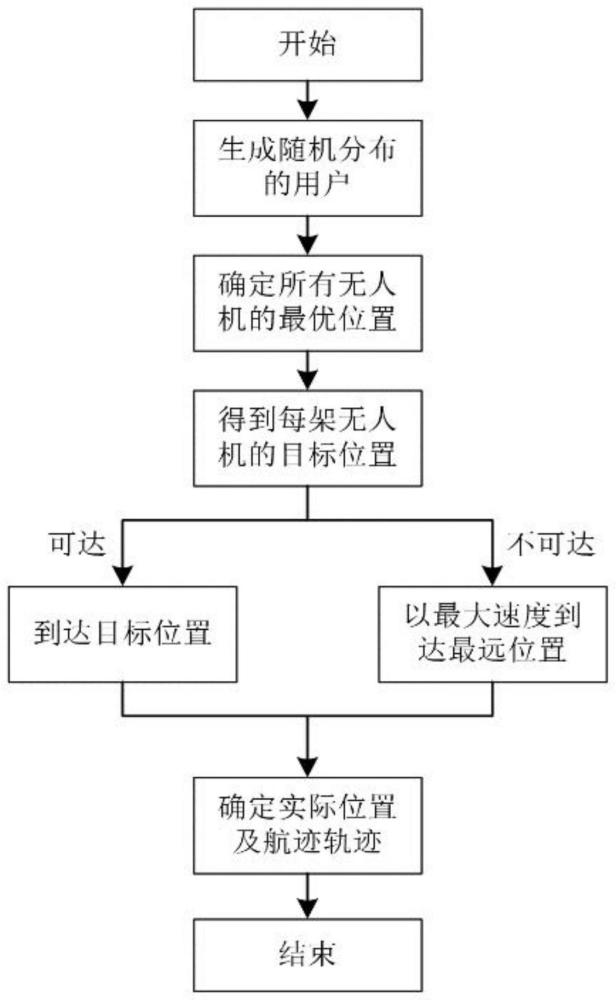
一种基于用户非分簇的无人机通信覆盖航迹规划算法的制作方法
本发明涉及无人机轨迹规划,具体为一种基于用户非分簇的无人机通信覆盖航迹规划算法。背景技术:1、在有限数量的无人机搭载通信基站对用户进行通信覆盖的研究中,当覆盖区域面积较大且用户较分散时,无法实现无人机......
-
一种基于多项式混沌法的船舶会遇航迹优化方法及系统
本发明涉及船舶会遇控制,具体涉及一种基于多项式混沌法的船舶会遇航迹优化方法及系统。背景技术:1、在船舶的路径规划及避碰方面,由于海洋环境的不确定性、船舶自身操作特性以及避碰规则的限制等因素,在路径的决......
-
融合先验策略的改进TD3算法的无人机航迹规划方法
本发明涉及无人机路径规划领域,尤其涉及一种融合先验策略的改进td3算法的无人机航迹规划方法。背景技术:1、近年来,随着科技的不断发展,无人机(unmanned aerial vehicle,uav)由......
-
基于BAB-枚举组合法的无人机多目标攻击航迹规划求解方法
本发明属于无人机,具体涉及一种基于bab-枚举组合法的无人机多目标攻击航迹规划求解方法。背景技术:1、现代战争朝着智能无人化的方向发展,无人机作为无人作战的主要力量,拥有部署灵活、作战面宽、零伤亡的优......
-

一种多目标场景下基于分层优化的多无人机协同航迹规划方法
本发明属于无人机控制领域,特别涉及基于深度强化学习的多无人机协同航迹规划方法设计。背景技术:1、随着无人机技术的快速发展,无人机集群的协同操作将应用于城市交通管理、灾难救援、智能物流等领域,为人们的生......
-
一种基于航迹区域分析的无人机精准定向驱离方法和装置
本申请涉及导航欺骗,特别是涉及一种基于航迹区域分析的无人机精准定向驱离方法和装置。背景技术:1、当前,无人机(rotor unmanned aerial vehicle,ruav)在航拍摄影、晚会表演......
-
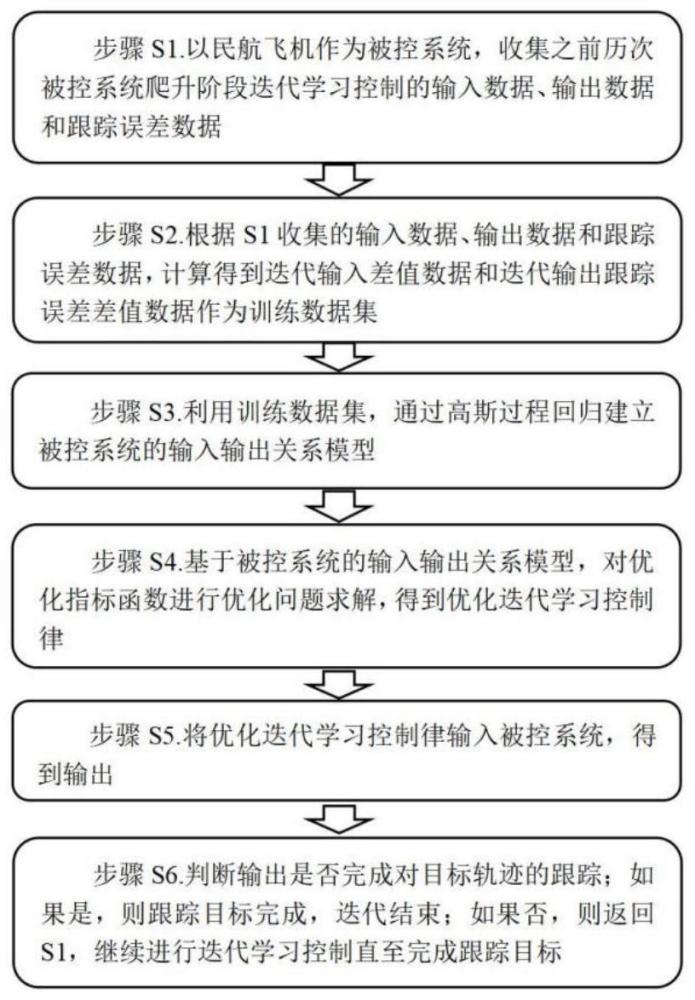
基于高斯过程回归的航空器航迹跟踪迭代学习控制方法
本发明涉及民航航空器控制,具体涉及一种基于高斯过程回归的航空器航迹跟踪迭代学习控制方法。背景技术:1、在民航航空器的飞行过程中,航班起飞具有反复跟踪相同给定轨迹的需求,目标轨迹固定不变,且系统每次运行......
-
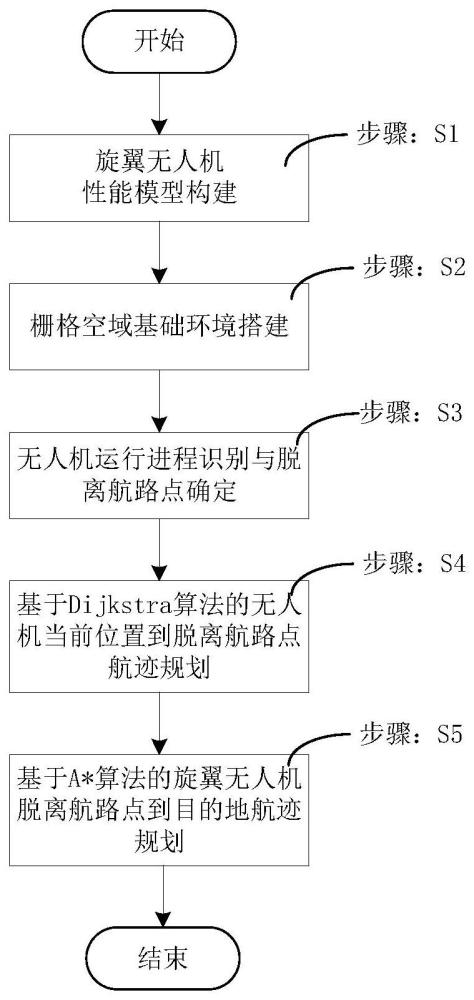
固化和自由混合空域下基于无人机动态意图的航迹规划方法
本发明涉及一种固化和自由混合空域环境下基于旋翼无人机动态意图的航迹规划方法,属于空中交通管理、空域规划与管理、无人机航迹规划等。背景技术:1、针对无人机航空运输系统中存在的单一无人机执行多任务,无人机......
-
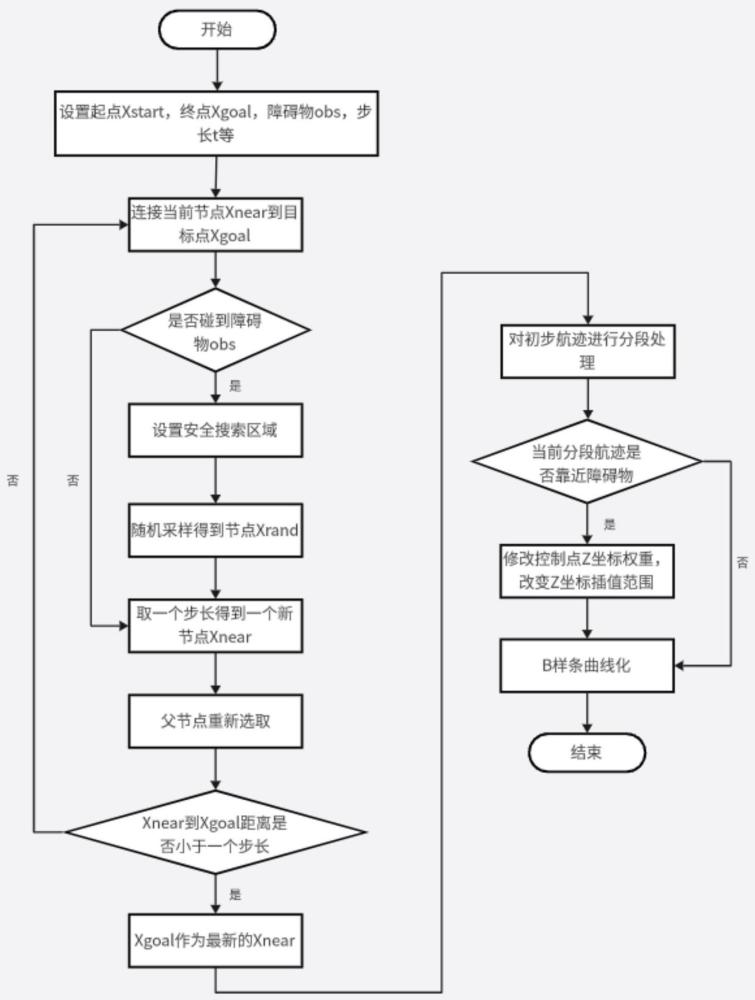
基于目标导向的改进RRT无人机航迹规划方法及设备
本发明涉及航迹规划技术,尤其涉及一种基于目标导向的改进rrt无人机航迹规划方法及设备。背景技术:1、随着自动驾驶技术的快速发展,无人机在未知环境下的自主探索技术不断扩展到越来越多的应用领域。无人机进行......
-
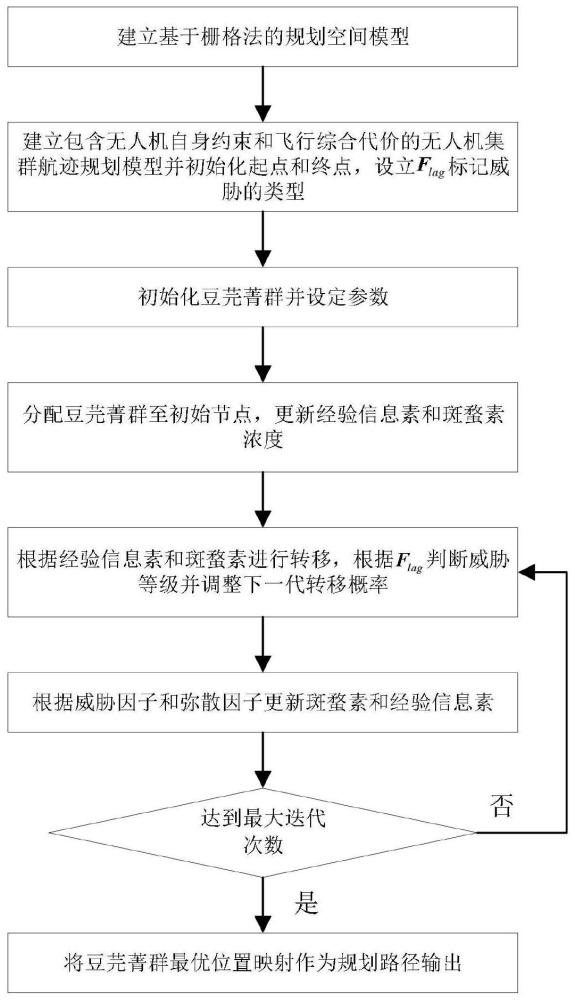
基于豆芫菁群机制的多无人机航迹规划方法及系统
本发明涉及无人机路径规划,具体而言,涉及一种基于豆芫菁群机制的多无人机航迹规划方法及系统。背景技术:1、无人机集群路径规划技术是无人机实现自主避障且自主决策完成既定任务的关键技术之一。由于城市建设的多......
-
带时延的无人机编队协同跟踪目标航迹规划方法与流程
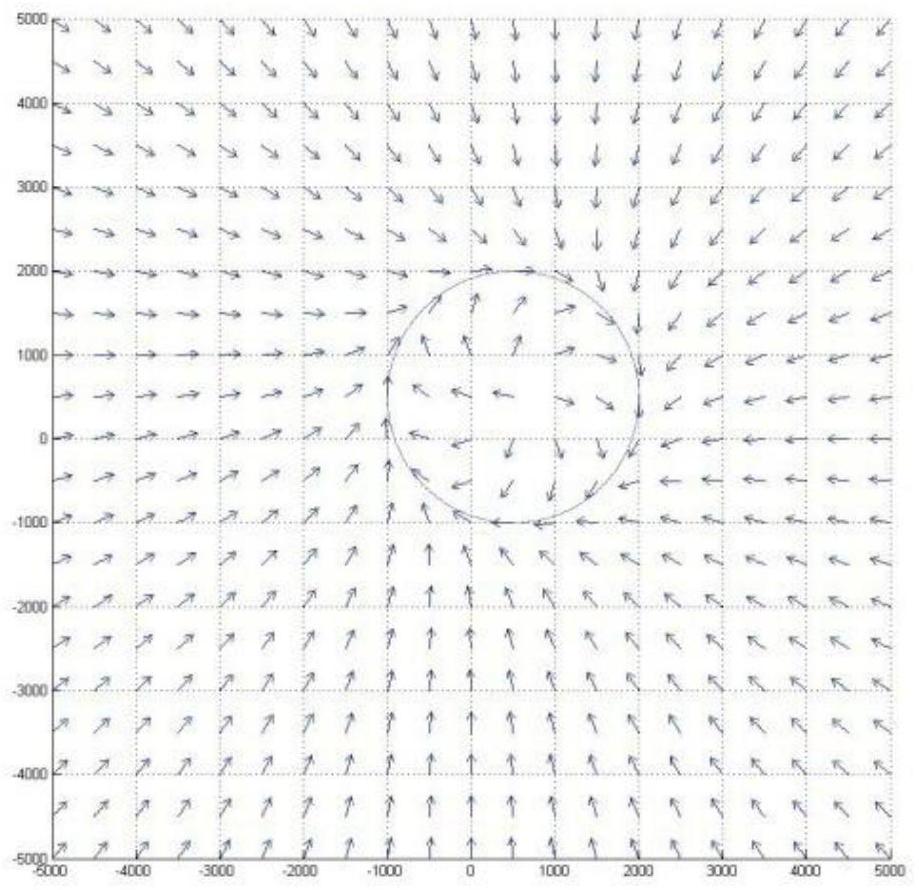
本发明属于无人机编队航迹规划领域,特别涉及一种基于lyapunov导航向量场的带时延的无人机编队协同跟踪目标航迹规划方法。背景技术:1、航迹规划的目的是控制无人机的位置,一般情况下,对无人机编队协同跟......
-
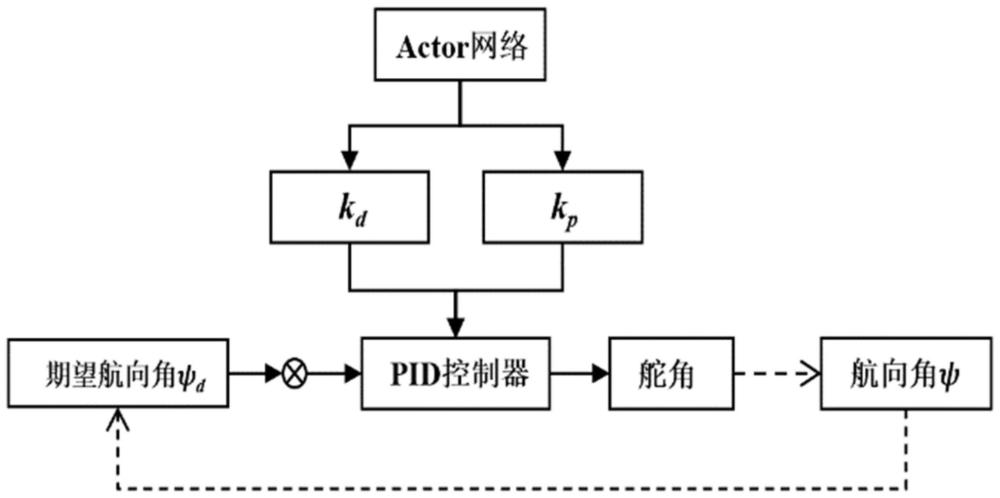
水面无人艇航迹跟踪控制参数匹配方法
本发明属于无人艇航迹跟踪控制领域,具体涉及一种基于软更新算法的无人艇航迹跟踪控制参数匹配方法。背景技术:1、在无人艇航迹跟踪领域pid控制相比于其他的控制应用范围广,调参较容易,但pid控制参数整定较......
-
一种无人机无动力应急返场航迹规划与控制方法及系统与流程
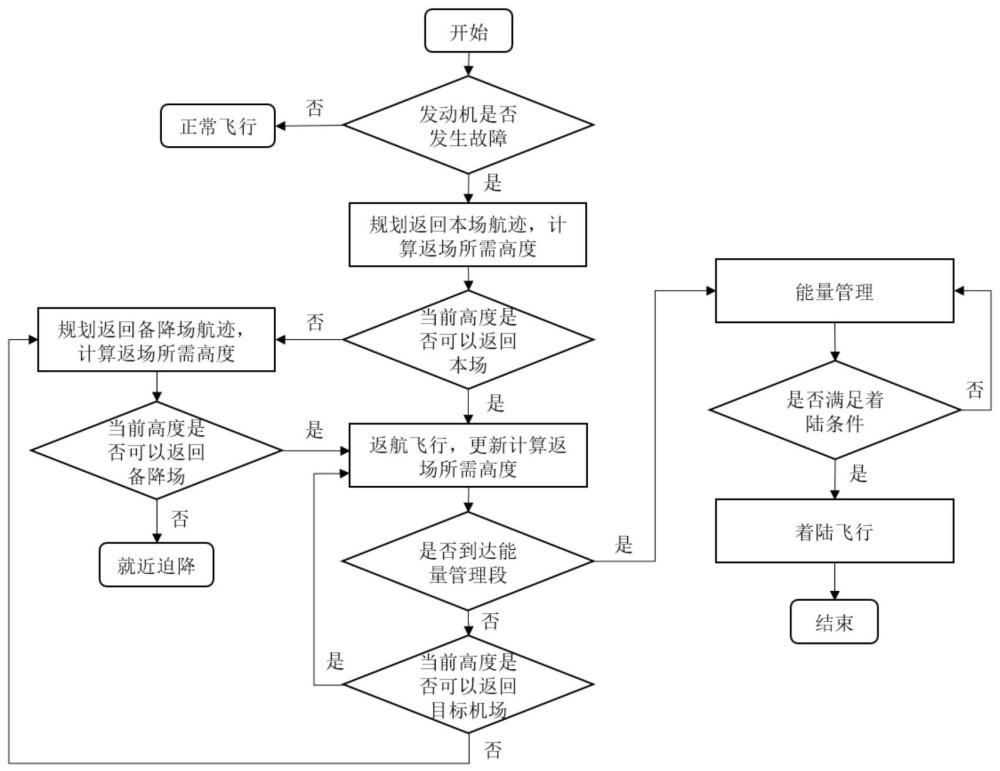
【】本发明涉及无人机控制,尤其涉及一种无人机无动力应急返场航迹规划与控制方法及系统。背景技术0、背景技术:1、目前,无人机已被广泛应用到各行各领域,但是由发动机故障导致的无人机事故时有发生。当无人机出......
-
无人机航迹规划方法、装置、电子设备及存储介质与流程
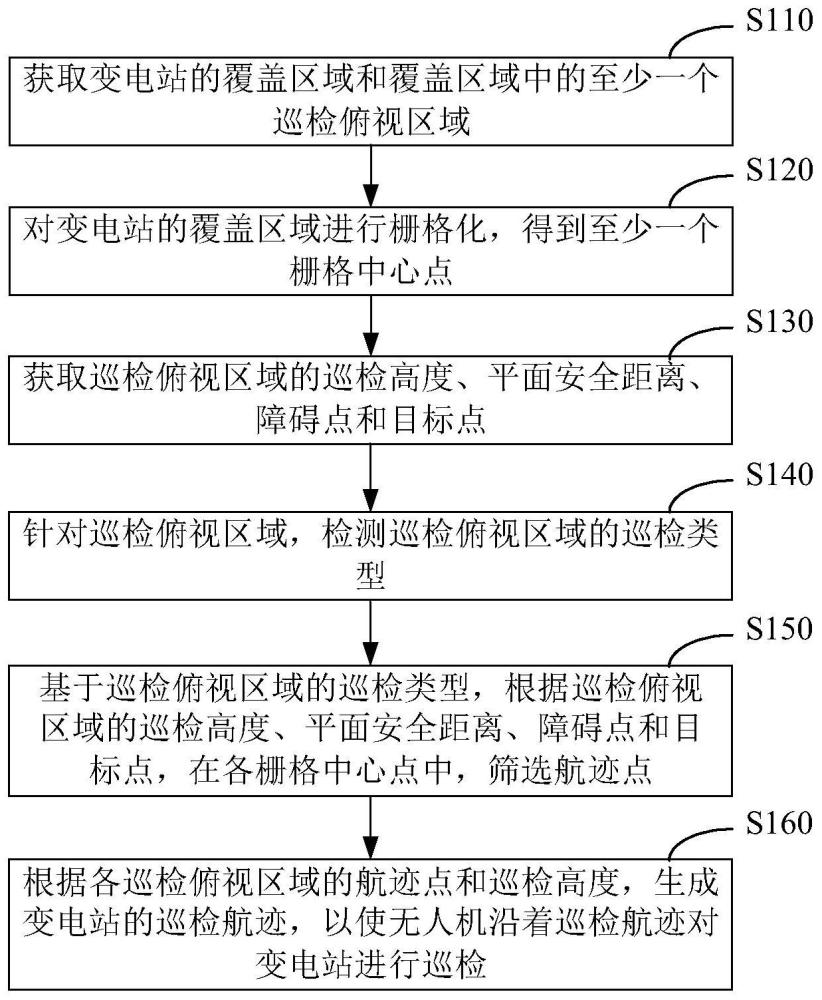
本发明涉及配电网,尤其涉及一种无人机航迹规划方法、装置、电子设备及存储介质。背景技术:1、智能电网的出现改变了传统变电站运维模式,无人机技术在变电行业中的应用日益广泛。相比传统的人工巡检方式,无人机配......
技术新讯 > 航迹 > 列表
 2024-11-19
2024-11-19精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01