一种基于航迹区域分析的无人机精准定向驱离方法和装置
- 国知局
- 2024-08-01 00:13:50
本申请涉及导航欺骗,特别是涉及一种基于航迹区域分析的无人机精准定向驱离方法和装置。
背景技术:
1、当前,无人机(rotor unmanned aerial vehicle,ruav)在航拍摄影、晚会表演、快递服务、搜索救援等民用领域都得到了广泛的应用,极大程度地丰富和方便了人们的生活。正是由于无人机容易购买、操作简单灵活,可随时随地起飞降落,所以无人机深受民众的青睐,但随着其数量爆发式的增长,低空安全正面临着严峻的威胁。
2、位于城市区域的经贸活动圈,不符合资质且未经报备的无人机在这些区域上空进行不合理测绘及偷拍行为,给敏感区域的防间保密和人员密集区的人身安全保护带来严峻威胁。
3、目前市场上绝大多数无人机都是以卫星导航作为主要的导航定位手段,特别是低成本的消费级无人机,卫星导航是其唯一的导航方式,所以导航欺骗干扰是一种行之有效的无人机反制手段。在诸多无人机反制手段中,使用导航诱骗方法对无人机进行驱离是城市环境中的首选手段,相较于直接击落或迫降更具安全性。
4、考虑到城市环境中楼宇林立的现实情况,无人机的驱离问题必须考虑驱离过程中与建筑物的避让问题,否则极易引发二次伤害问题,因此无人机驱离路线的误差必须满足所处城市楼宇环境下的防撞约束。相关资料表明,针对无人机的定向驱离已有部分研究,但缺乏针对城市楼宇环境中存在防撞约束的无人机精准定向驱离问题的研究。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种基于航迹区域分析的无人机精准定向驱离方法和装置。
2、一种基于航迹区域分析的无人机精准定向驱离方法,所述方法包括:
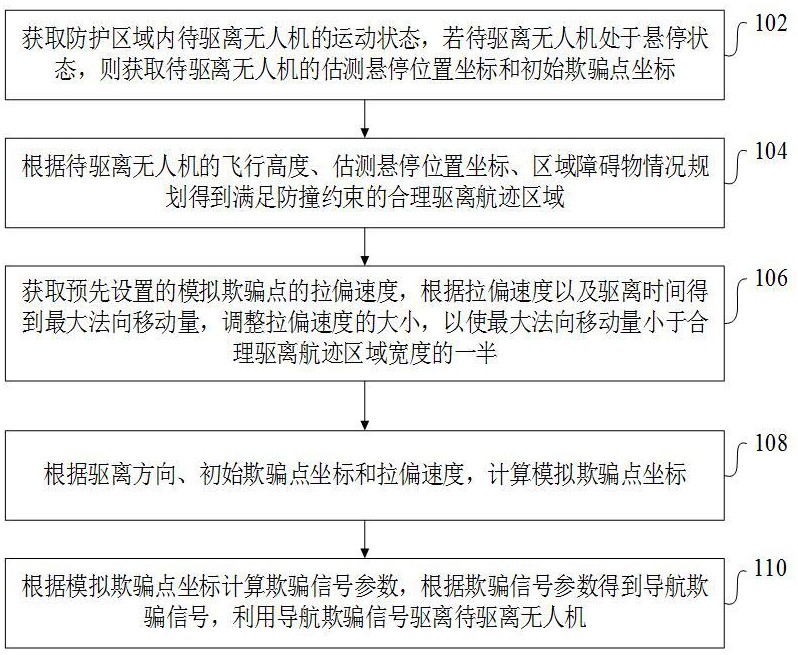
3、获取防护区域内待驱离无人机的运动状态,若待驱离无人机处于悬停状态,则获取待驱离无人机的估测悬停位置坐标和初始欺骗点坐标;
4、根据所述待驱离无人机的飞行高度、所述估测悬停位置坐标、区域障碍物情况规划得到满足防撞约束的合理驱离航迹区域;
5、获取预先设置的模拟欺骗点的拉偏速度,根据所述拉偏速度以及驱离时间得到最大法向移动量,调整所述拉偏速度的大小,以使所述最大法向移动量小于合理驱离航迹区域宽度的一半;
6、根据所述驱离方向、初始欺骗点坐标和所述拉偏速度,计算模拟欺骗点坐标;
7、根据所述模拟欺骗点坐标计算欺骗信号参数,根据所述欺骗信号参数得到导航欺骗信号,利用所述导航欺骗信号驱离所述待驱离无人机。
8、在其中一个实施例中,获取期望悬停位置坐标;根据所述期望悬停位置坐标和期望悬停点的估计误差得到初始欺骗点坐标。
9、在其中一个实施例中,根据所述估测悬停位置坐标、待驱离无人机实际悬停位置与期望悬停位置之间的控制误差以及测量估测悬停位置引入的测量误差,得到期望悬停位置坐标。
10、在其中一个实施例中,根据所述待驱离无人机的飞行高度、所述估测悬停位置坐标和区域障碍物情况规划得到若干驱离航迹区域;所述驱离航迹区域的高度为所述飞行高度、宽度为预设宽度的平面矩形,平面矩形的长边方向指向对应的驱离方向;最大化核心敏感目标到驱离航迹区域中轴线的投影距离,得到合理驱离航迹区域。
11、在其中一个实施例中,在待驱离无人机最大飞行速度内设定模拟欺骗点的拉偏速度;根据期望悬停点的估计误差的轴向分量、法向分量以及所述拉偏速度计算在驱离方向的法向速度;根据所述法向速度以及驱离时间得到最大法向移动量;调整所述拉偏速度的大小,以使所述最大法向移动量小于合理驱离航迹区域宽度的一半。
12、在其中一个实施例中,根据当前欺骗点坐标和期望悬停点坐标计算得到无人机瞬时速度;根据所述估计误差的轴向分量、法向分量以及拉偏速度计算得到所述无人机瞬时速度与驱离方向轴线的夹角;根据所述夹角和所述拉偏速度计算在驱离方向的法向速度。
13、在其中一个实施例中,根据所述法向速度和驱离时刻得到法向移动量,在驱离时间内对所述法向移动量进行积分,得到最大法向移动量。
14、在其中一个实施例中,利用外部探测设备估测待驱离无人机的实时位置和待驱离无人机稳定飞行时的飞行方向角;根据所述飞行方向角以及核心敏感目标到合理驱离航迹区域中轴线的投影距离得到效果评估公式为:
15、;
16、其中,为合理驱离航迹区域的驱离方向,为飞行方向角,;根据所述效果评估公式进行驱离效果评估。
17、在其中一个实施例中,若待驱离无人机处于移动飞行状态,则通过压制干扰设备向所述待驱离无人机发射遥控链路压制干扰信号;获取所述待驱离无人机受到干扰后的运动状态,若无人机返航,则驱离成功。
18、一种基于航迹区域分析的无人机精准定向驱离装置,所述装置包括:
19、参数获取模块,用于获取防护区域内待驱离无人机的运动状态,若待驱离无人机处于悬停状态,则获取待驱离无人机的估测悬停位置坐标和初始欺骗点坐标;
20、区域规划模块,用于根据所述待驱离无人机的飞行高度、所述估测悬停位置坐标、区域障碍物情况规划得到满足防撞约束的合理驱离航迹区域;
21、拉偏速度调整模块,用于获取预先设置的模拟欺骗点的拉偏速度,根据所述拉偏速度以及驱离时间得到最大法向移动量,调整所述拉偏速度的大小,以使所述最大法向移动量小于合理驱离航迹区域宽度的一半;
22、欺骗点计算模块,用于根据所述驱离方向、初始欺骗点坐标和所述拉偏速度,计算模拟欺骗点坐标;
23、无人机驱离模块,用于根据所述模拟欺骗点坐标计算欺骗信号参数,根据所述欺骗信号参数得到导航欺骗信号,利用所述导航欺骗信号驱离所述待驱离无人机。
24、上述基于航迹区域分析的无人机精准定向驱离方法和装置,通过获取防护区域内处于悬停状态的待驱离无人机的估测悬停位置坐标和初始欺骗点坐标,根据待驱离无人机的飞行高度、估测悬停位置坐标、区域障碍物情况规划得到满足防撞约束的合理驱离航迹区域,能够实现在该区域内无人机被安全驱离,获取预先设置的模拟欺骗点的拉偏速度,根据拉偏速度以及驱离时间得到最大法向移动量,调整拉偏速度的大小,以使最大法向移动量小于合理驱离航迹区域宽度的一半,能够减小无人机的法向移动对驱离航迹带来的影响,在保证驱离安全的情况下提高驱离精度,根据驱离方向、初始欺骗点坐标和拉偏速度,计算模拟欺骗点坐标,根据模拟欺骗点坐标计算欺骗信号参数,根据欺骗信号参数得到导航欺骗信号,利用导航欺骗信号驱离待驱离无人机。本发明实施例,能够实现在城市高楼环境下入侵无人机的安全驱离,提高定向驱离精度。
技术特征:1.一种基于航迹区域分析的无人机精准定向驱离方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,获取初始欺骗点坐标包括:
3.根据权利要求2所述的方法,其特征在于,获取待驱离无人机的期望悬停位置坐标包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述待驱离无人机的飞行高度、所述估测悬停位置坐标、区域障碍物情况规划得到满足防撞约束的合理驱离航迹区域包括:
5.根据权利要求1所述的方法,其特征在于,所述获取预先设置的模拟欺骗点的拉偏速度,根据所述拉偏速度以及驱离时间得到最大法向移动量,调整所述拉偏速度的大小,以使所述最大法向移动量小于合理驱离航迹区域宽度的一半的步骤,包括:
6.根据权利要求1-5任一项所述的方法,其特征在于,根据期望悬停点的估计误差的轴向分量、法向分量以及所述拉偏速度计算在驱离方向的法向速度的步骤,包括:
7.根据权利要求6所述的方法,其特征在于,根据所述法向速度以及驱离时间得到最大法向移动量的步骤,包括:
8.根据权利要求1所述的方法,其特征在于,所述方法还包括:
9.根据权利要求1所述的方法,其特征在于,所述方法还包括:
10.一种基于航迹区域分析的无人机精准定向驱离装置,其特征在于,所述装置包括:
技术总结本申请涉及一种基于航迹区域分析的无人机精准定向驱离方法和装置。所述方法包括:获取防护区域内处于悬停状态待驱离无人机的估测悬停位置坐标和初始欺骗点坐标;根据待驱离无人机的飞行高度、估测悬停位置坐标、区域障碍物情况规划得到满足防撞约束的合理驱离航迹区域;获取预先设置的模拟欺骗点的拉偏速度,根据拉偏速度以及驱离时间得到最大法向移动量,调整拉偏速度的大小,以使最大法向移动量小于合理驱离航迹区域宽度的一半;根据驱离方向、初始欺骗点坐标和拉偏速度计算模拟欺骗点坐标;根据模拟欺骗点坐标对应的导航欺骗信号驱离待驱离无人机。采用本方法能够实现在安全驱离防护区域内入侵无人机的情况下提高定向驱离精度。技术研发人员:周超,杨俊,刘宗敏,马超受保护的技术使用者:中国人民解放军国防科技大学技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240730/200119.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表