一种基于自适应模糊自抗扰算法的电机控制方法
- 国知局
- 2024-08-01 00:13:49
本发明涉及微型电机控制的,尤其涉及一种基于自适应模糊自抗扰算法的电机控制方法。
背景技术:
1、微型电机作为一种新型的微电机,在轿车电器、办公自动化设备、精密仪器仪表、计算机、工业控制系统、航空航天、智能机器人等领域有着广泛的应用前景。微型电机尤其在疾病治疗方面的应用发挥着重要作用。脑血肿是指第二常见的中风亚型,通常由高血压引起的血管突然破裂引起。疾病进展迅速,3个月内死亡率为20%-30%,是中老年人疾病谱系死亡和残疾的主要原因。总体预后较差(30日内病死率为40%,1年内病死率高达64%)。需要及时有效的手术治疗才能获得良好的结果。许多农村医院往往既没有经验丰富的神经外科医生,也没有内窥镜、机器人等先进设备。因此,迫切需要有针对性的新健康治疗策略,例如远程手术。
2、设计一种自动血肿去除装置是必要的,该装置可以安装在手术机器人的末端,结合内窥镜技术和机器人的优点。同时,设备必须确保将整个病变区域实时暴露给外科医生。该装置主要由带有嵌入式内窥镜的特殊透明管、配备柔性液体传感器的密封腔和微型电机组成。该装置可以方便地安装在多关节工业机械手的末端,可以很容易地扩展到远程手术系统。因此对微型电机转速的精确控制有助于提高远程手术的精确度。
技术实现思路
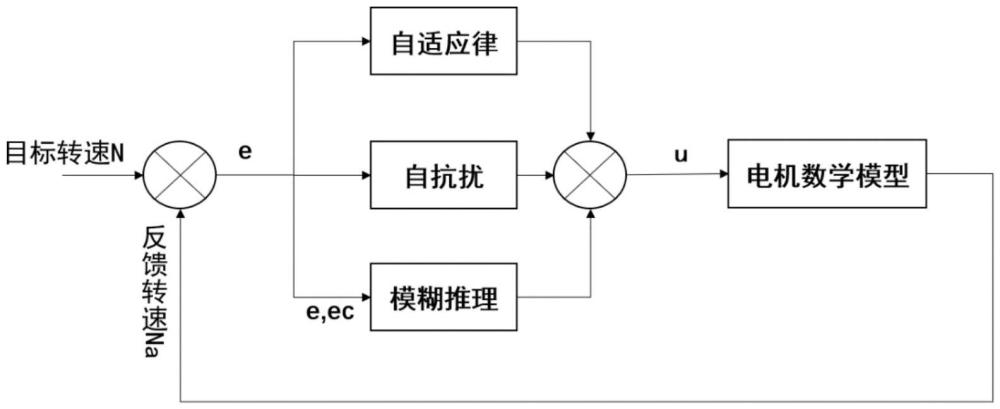
1、本发明针对上述的电机转速快速和精确控制,提供了一种基于自适应模糊自抗扰算法的电机控制方法,本发明在传统自抗扰控制中引入自适应率和模糊推断,使得微型电机的转速误差在有限时间收敛到零,从而提高整个系统的控制精度和稳定性。
2、技术方案:
3、一种基于自适应模糊自抗扰算法的电机控制方法,包括以下几个步骤:
4、步骤q1:搭建微型电机的数学模型;
5、步骤q2:确定控制量输入,定义微型电机系统的状态变量x1、x2、x3;
6、步骤q3:根据步骤q1搭建的电机模型和步骤q2的状态变量,设计自适应模糊自抗扰控制律;
7、步骤q4:得到微型电机控制器的输入u;
8、步骤q5:对微型电机进行控制;
9、步骤q6:对轮毂电机的转速n进行反馈检测,若符合收敛指令的要求,则结束控制;若不符合收敛指令的要求,则返回步骤q2重新控制。
10、优选的,所述步骤q1搭建的微型电机的数学模型,具体过程如下:
11、微型电机的基尔霍夫定律:
12、
13、电机电磁转矩方程:
14、te=cmia=klia
15、
16、其中l是绕组电感;r是绕组电阻,ia是定子相电流;u表示系统的给定电压,e表示电机在额定励磁下的反作用力;te表示电磁转矩,而tl和kl分别表示负载转矩和转矩系数,cm表示电动机额定励磁下的转矩电流比,j表示电机的旋转惯量,n表示电机转速;
17、考虑反电动势e=kqn,零初始条件下的传递函数表示如下:
18、
19、j表示电机的旋转惯量,s为拉普拉斯算子,kl为转矩系数,kq反电动势系数。
20、优选的,所述步骤q2确定控制量输入,定义微型电机系统的状态常量x1为实际转速、x2表示实际转速的微分,x3表示系统的广义扰动,具体过程如下:
21、
22、其中l是绕组电感;r是绕组电阻,u表示系统的给定电压,kl表示转矩系数,j表示电机的旋转惯量,kq反电动势系数;
23、表示对x1微分,h表示对扰动x3的微分,系统的广义扰动被定义为u为系统的输入,y为系统的输出,f为广义扰动,w为外部扰动,a1,a2表示系统参数,b为控制增益,a1,a2,b均为不确定参数,而b0为一常数且b0≈b,同时包含内部不确定性和外部扰动;设置x1=y,并将其扩展到系统的状态变量;
24、线性扩展状态观测器leso的建立和编写如下:
25、
26、通过选择适当的观测器增益b1,b2,b3,b0≈b,b为控制增益,y为系统输出,u为系统输入,z1,z2,z3表示状态观测器的状态变量,实现对系统中各种变量的实时跟踪z1→y,
27、优选的,所述步骤q3中,根据步骤q1搭建的电机模型和步骤q2的状态变量,设计自适应模糊自抗扰控制器;具体过程如下:
28、自适应模糊控制器设计为:uc=u0+ua;
29、uc为自适应模糊自抗扰控制律,u0为自抗扰控制器,自适应控制律ua。
30、具体的,所述根据步骤q1搭建的电机模型和步骤q2的状态变量,设计自适应模糊自抗扰控制律;自抗扰设计具体过程如下:
31、考虑如下描述的二阶系统:
32、
33、u为系统的输入,y为系统的输出,w为外部扰动,a1,a2表示系统参数,b为控制增益,a1,a2,b均为不确定参数,而b0为一常数且b0≈b;
34、设计控制的输入u:
35、
36、而忽略与此相关的估计误差,系统可以简化为双积分级数结构,描述如下:
37、
38、u0为自抗扰控制器;
39、pd控制器设计如下:
40、u0=kp(v-z1)-kdz2
41、其中v表示给定信号,kp.kd表示控制器增益,s为拉普拉斯算子,闭环传递函数改写如下:
42、
43、leso特征方程如下:
44、λ(s)=s3+b1s2+b2s+b3
45、通过选择理想的特征方程λ(s)=(s+w0)3,我们可以得到以下关系:
46、b1=3w0,b2=3w02,b3=w03
47、其中w0表示观测器带宽;如果选择参数为kp=wc2,kd=2wc,则此时的控制器带宽为wc。
48、具体的,上述根据步骤q1搭建的电机模型和步骤q2的状态变量,设计自适应模糊自抗扰控制律;自适应律和模糊推理设计具体过程如下:
49、由于kq是一个不确定常数,因此可以通过反步法获得其估计和自适应控制律ua;将误差函数定义为e=x1-x1d,将误差函数的导数定义为δ=x2-x2d,其中x1d为期望转速,x1为实际转速;为实际转速的微分,x2d表示期望转速的微分,x2表示实际转速的微分,表示期望转速的二阶微分自适应定律设计如下:
50、
51、
52、其中l是绕组电感;r是绕组电阻,te表示电磁转矩,kl表示转矩系数,j表示电机的旋转惯量,k2为不确定正常数;
53、利用if-then模糊推理系统中所有控制参数kp,kd,输入为误差e,误差的微分ec输出为kp,kd,采用高斯函数进行模糊推理,输入输出的参数范围为e∈(-0.2,0.2),ec∈(-0.2,0.2),kp,kd∈(-0.6,0.6)。
54、本发明的有益效果
55、本发明设计一种基于自适应模糊自抗扰算法的电机控制方法,有效的解决了传统控制中的跟踪误差大,响应速度慢,抗干扰性差等不足。在传统自抗扰控制中引入自适应率和模糊推断,使得微型电机的转速误差在有限时间收敛到零,从而提高整个系统的控制精度和稳定性。实现了运用于微型电机的高精度,高效率控制。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200118.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表