基于豆芫菁群机制的多无人机航迹规划方法及系统
- 国知局
- 2024-07-31 23:58:03
本发明涉及无人机路径规划,具体而言,涉及一种基于豆芫菁群机制的多无人机航迹规划方法及系统。
背景技术:
1、无人机集群路径规划技术是无人机实现自主避障且自主决策完成既定任务的关键技术之一。由于城市建设的多样性与气候变化的复杂性,在无人机执行城市资源调度和城市防护任务时,面临多方位的通讯压力和多层次的威胁,影响无人机集群的任务实现,为了满足飞行任务的执行条件,需要设计出综合最小威胁代价和最短路径条件下的从起点到终点的若干条航迹,并综合评估一条最优飞行航迹。另一方面,针对城市中复杂多变的环境因素和人为电磁影响因素,要求无人机集群在执行任务时必须实时做出相应决策改变,以降低飞行代价,从而有效地规避威胁,提高作业的效率和准确度,为推进智慧城市建设、加强城市防卫、加速物资调度流通具有重要意义和价值。
2、通过对现有技术文献的检索发现,苟进展等在《控制与决策》(2023,38(05):1464-1472)上发表的“基于群智能-一致性理论的无人机编队全过程飞行航迹规划方法”提出改进的多步优化粒子群算法,并引入模型预测控制滚动优化航路点使得规划方法更适用于编队飞行,但该算法搜索速度慢,计算量大,难以保证算法在求解最优航迹时的实时性。郑锴等在《电光与控制》(2022,29(10):7-11+101)上发表的“基于改进a*算法的无人机任务分配和航迹规划优化方法”将改进的a*算法运用到航迹规划中实现航迹寻优,应用三次b样条曲线法进行航迹平滑实现了局部航迹动态规划,但计算复杂,威胁代价大,难以保证在最小的威胁代价下寻找到最优路径。潘楠等在《信息与控制》(2022,51(04):411-422)上发表的“面向城市巡防的多无人机协同航迹规划”提出基于levy飞行策略的混合差分乌鸦搜索算法(ldcsa),将剪枝处理和logis-tic混沌映射机制加入快速遍历随机树(rapidly-exploringrandom trees,rrt)算法中,并通过改进的rrt算法进行航迹初始化,提高了算法的全局收敛性,缩短了收敛时间,但算法复杂度高,消耗算力资源大,在处理针对高复杂度影响因素的城市的路径规划问题时可能会性能下降。顾海艳等在《计算机工程与应用》(2021,57(23):270-279)上发表的“基于模型预测控制的无人机时空协同航迹规划”建立了由mpc(model predictive control,)控制器、空间协同模块和时间协同模块组成的多无人机分布式时空协同航迹规划框架结构,解决了分布式时空协同问题的动作一致性问题,但模型预测和建立依赖于采样时刻的状态和参考信息,且干扰和测量噪声对模型的建立和预测的影响较大,不利于解决实际复杂环境下的无人机航迹规划问题。
3、已有的文献检索结果表明,现有的无人机航迹规划存在着环境建模复杂度低,算法复杂度高,算法搜索速度慢,威胁代价大,抗干扰和抗噪声能力差等问题;且对于城市防护和调度的无人机航迹规划问题缺乏高效的解决方案,对无人机执行任务时受到的不同等级的威胁判定不明确。因此设计了豆芫菁机制来求解最优的无人机群航行路径,对智慧城市的建设和城市调度与防护具有现实意义。
技术实现思路
1、本发明要解决的技术问题是:
2、为了解决在面对城市防护和调度任务时,现有无人机航迹规划方法复杂、搜索速度慢、威胁代价大、抗干扰和抗噪声能力差,且受不同威胁时判定不明确的问题。
3、本发明为解决上述技术问题所采用的技术方案:
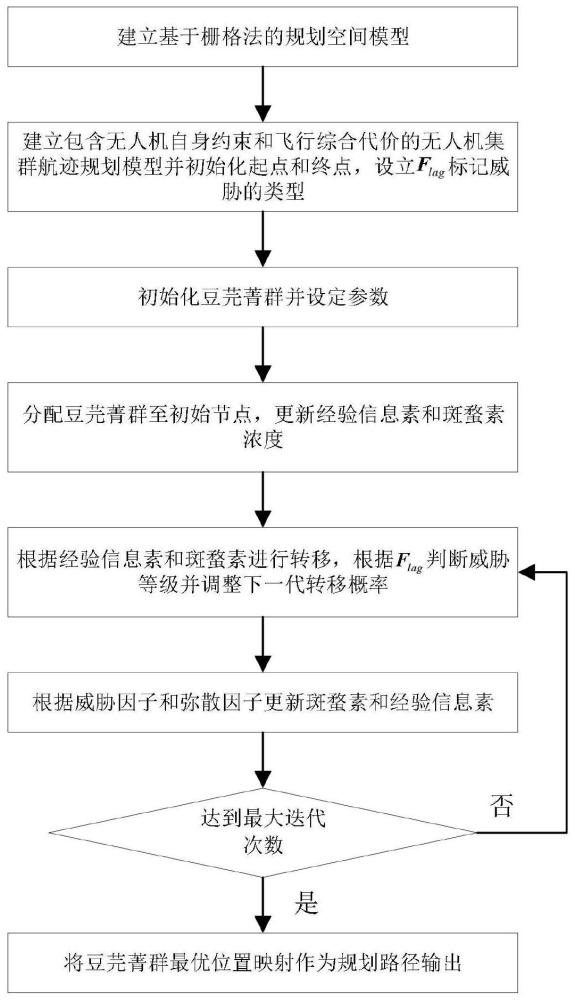
4、本发明提供了一种基于豆芫菁群机制的多无人机航迹规划方法,对威胁进行标记并分级,利用经验信息素和斑蝥素浓度来选择路径,包括以下步骤:
5、s100、建立基于栅格法的二维规划空间模型;
6、s200、建立包含无人机自身约束和飞行综合代价的无人机集群航迹规划模型,并初始化飞行起点和终点,设立flag向量标记威胁的类型;
7、s300、初始化豆芫菁群并设定相应参数,所述参数包括经验信息素浓度、经验信息素矩阵、经验信息素增加强度、经验信息素重要程度、启发因子重要程度、经验信息素挥发系数、斑蝥素浓度、斑蝥素权重、斑蝥素矩阵、威胁强度因子和斑蝥素弥散因子;初始化后,获得当前节点至下一节点的经验信息素浓度差、斑蝥素浓度差、当前节点的代价及启发因子;
8、s400、将豆芫菁群分配到初始节点,标记斑蝥素威胁感知因子和标记向量后,获得豆芫菁群的路径集合;
9、s500、豆芫菁群根据状态转移策略选择下一节点并进行转移,根据flag向量判断威胁等级并调整下一代转移概率,重复本步骤直至访问节点为航迹中点,获得航迹集合;
10、s600、根据威胁强度因子和弥散因子更新全局经验信息素和斑蝥素,判断是否达到设定的最大迭代次数,若是,则迭代终止,得到无人机数量的从起点到终点的无人机航迹映射在坐标系中作为规划路径输出;若不是,则重复s500-s600至达到最大迭代次数后终止。
11、进一步地,在s100中,设规划空间起始坐标为终止坐标为设网格大小为l×w,其中l为网格的长,w为网格的宽,则可得规划空间的栅格行数为规划空间的栅格列数为可得总节点数量n=row×col,设第i个节点的坐标为
12、进一步地,在s200中,具体包括,
13、s210、设第g条无人机航迹的起始坐标为终点坐标为所受到三种潜在威胁的数目定义为其中,为高层建筑物威胁的数目,为恶劣天气威胁的数目,为电磁干扰威胁的数目;
14、设高层建筑物威胁范围为正方形,恶劣天气威胁和电磁干扰威胁范围均为半径不同的圆形,第u个高层建筑物威胁中心点坐标为其中,1≤u≤(dhb/2);第v个恶劣天气威胁中心点坐标为其中,1≤v≤dsw;第q个电磁干扰威胁中心点坐标为其中,1≤q≤dem;高层建筑物威胁的边长为dhb,恶劣天气威胁的半径为dsw,电磁干扰威胁的半径为dem;
15、则第i个节点受到的总代价可表示为,
16、
17、其中,是第i个节点受到的威胁代价的总和,其中i=0,1,2,…,n;是第i个节点受到第u个高层建筑物威胁的威胁代价,其中为第i个节点距离第u个高层建筑物威胁中心的距离;是第i个节点受到第v个恶劣天气威胁的威胁代价,其中为第i个节点距离第v个恶劣天气威胁中心的距离;是第i个节点受到第q个电磁干扰威胁的威胁代价,其中为第i个节点距离第q个电磁干扰威胁中心的距离;δhb、δsw和δem分别为三种威胁的威胁代价和的权重,且δhb∈[0,1],δsw∈[0,1],δem∈[0,1],δhb+δsw+δem=1;
18、s220、对无人机集群的航迹起点和终点进行初始化,设第g条无人机航迹的起始坐标为终点坐标为设无人机总数目为g,则1≤g≤g;
19、s230、设威胁为其中,代表高层建筑物威胁,代表恶劣天气威胁,代表电磁干扰威胁;
20、设flag向量标记是否受到ter的威胁,得到flag=[flag(1),flag(2),flag(3)],其中,flag(1)代表是否检测到高层建筑物威胁,flag(2)代表是否检测到恶劣天气威胁,flag(3)代表是否检测到电磁干扰威胁;
21、定义威胁感知因子为θ=[θhb,θsw,θem],记,
22、
23、其中,pd为威胁感知距离,和分别对应三种威胁的感知距离;
24、当时,flag(1)=1,否则flag(1)=0;当时,flag(2)=1,否则flag(2)=0;当时,flag(3)=1,否则flag(3)=0。
25、进一步地,在s300中,具体包括,
26、初始化第t代当前节点vt到下一节点et的经验信息素浓度其中,1≤vt≤n,1≤et≤n,t为迭代次数,得到经验信息素的n×n矩阵
27、初始化经验信息素增加强度qτ;经验信息素重要程度ατ;启发因子重要程度β;经验信息素挥发系数ρτ;
28、初始化第t代当前节点vt到下一节点et的斑蝥素浓度斑蝥素权重为λ;得到斑蝥素的n×n矩阵设威胁强度因子为φ=[φ(1),φ(2),φ(3)];斑蝥素弥散因子为ζ=[ζ(1),ζ(2),ζ(3)];其中,斑蝥素的威胁因数设斑蝥素因数为
29、初始时设t=0,初始第t代从当前节点到下一节点经验信息素浓度差得到,
30、
31、初始第t代从当前节点到下一节点斑蝥素浓度差得到,
32、
33、计算第i个节点受到的代价其中,
34、
35、第i个节点的启发因子
36、进一步地,在s400中,具体包括,
37、s410、读取起点坐标第t代第g条无人机航迹起点编号为终点编号为第t代豆芫菁当前节点编号记为其相邻结点的集合为
38、s420、将第t代k只豆芫菁置于起点,即使在起点加入第t代k只豆芫菁斑蝥素威胁感知因子θ=[θhb,θsw,θem]和标记向量flag=[flag(1),flag(2),flag(3)],当感知到威胁时进行威胁类型标记,并将起点的编号加入第t代k只豆芫菁的路径集合中。
39、进一步地,在s500中,具体包括,
40、s510、寻找毗邻节点,将每个节点中的八个相邻节点中排除不能直接到达的对角节点,其余四个节点构成可访问集合设为可访问集合中第j个节点的威胁感知距离,若则删除的第j个节点得到更新后的第t代k只豆芫菁的可访问集合
41、s520、判断s510获得的可访问集合是否为空,若为空,则执行s550;若不为空,则继续执行s530;
42、s530、设第t代k只豆芫菁可访问节点集个数为对于第t代第k只豆芫菁可访问的第n个节点有其状态转移概率为,
43、
44、其中,为第t代第k只豆芫菁可访问的第n个节点的经验信息素浓度,为第t代第k只豆芫菁可访问的第n个节点的启发因子,为第t代第k只豆芫菁可访问的第n个节点途径路径g的斑蝥素浓度;
45、根据轮盘赌法选择出第t代k只豆芫菁待访问的第n个节点集将待访问节点编号记为
46、s540、判断s530获得的第t代k只豆芫菁待访问节点的是否为第t代第g条航迹的终点其中g=1,2,3,…,g,若则加入终点编号至中,继续执行s550;否则令然后将编号加入中,返回s510继续执行;
47、s550、若k=k,执行下一步;否则返回s410,重复s400-s500。
48、进一步地,在s600中,具体包括,
49、s610、选出第t代中豆芫菁所经过的最短路径计算第t代最短路径长度lt得到最短路径的综合代价为
50、其中,为最短路径上的威胁代价之和,为最短路径上的资源消耗代价,具体表现为油耗,设每千米的单位油耗为h0,则
51、s620、根据历史知识更新经验信息素和斑蝥素,第t+1代经验信息素的增量为,
52、
53、对经验信息素进行全局更新后为,
54、
55、第t+1代斑蝥素的增量为,
56、
57、对斑蝥素进行全局更新后为,
58、
59、基于豆芫菁群机制的多无人机航迹规划系统,该系统具有与上述步骤对应的程序模块,运行时执行上述的基于豆芫菁群机制的多无人机航迹规划方法中的步骤。
60、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序配置为由处理器调用时实现基于豆芫菁群机制的多无人机航迹规划方法的步骤。
61、相较于现有技术,本发明的有益效果是:
62、本发明一种仿生与豆芫菁觅食时遇到外部威胁分泌斑蝥素进行威胁标记行为的无人机集群航迹规划模型,通过威胁分级制度对每一种潜在威胁进行分类识别,从而有效规避威胁,有利于跳出局部最优解,针对性解决了城市建设中利用无人机集群进行物资调度或灾情营救的航迹规划问题。
63、设置的威胁代价包括高层建筑物威胁代价,电磁干扰代价,恶劣天气威胁代价以及无人机自身的资源代价,有效提升了无人机集群进行航迹规划的抗噪声性能,平衡了最小综合代价和最短路径条件下的从起点到终点的最优路径,保证了在多威胁情况下无人机集群航行的安全性和有效性。
64、同时,通过历史经验信息的引导和威胁信息的约束,保证了求解的最优航迹的先进性,使得所设计的方法能够快速收敛于最优解。此外,本发明不但可实现单无人机航迹规划,也可解决多无人机从起点到多个终点的多路航迹规划问题,具有更强的普适性。
65、附图说明
66、图1为本发明实施例中基于豆芫菁群机制的多无人机航迹规划方法的流程图;
67、图2为本发明实施例中本方法与经典蚁群算法进行航迹规划的航迹对比图;
68、图3为本发明实施例中利用本方法进行多无人机从不同起点到相同终点的多无人机航迹规划图。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199426.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表