一种基于SMA柔性驱动穿刺装置的自适应动态面控制方法
- 国知局
- 2024-07-31 23:58:01
本发明涉及精密制造与智能驱动,具体涉及一种基于sma柔性驱动穿刺装置的自适应动态面控制方法。
背景技术:
1、在精密柔性驱动技术研究领域,形状记忆合金(sma)作为一种温控智能材料,采用sma作为驱动元件制作的驱动器,能够响应温度变化而产生显著应变,在应变重量比方面具有明显优势。由于质量轻、无噪声、高功重比等优良特性,近年来逐步应用于航空航天、生物医疗、仿生机器人以及信息电子等高端领域。sma因温度变化发生相变,通过马氏体相与奥氏体相的相互转换实现驱动功能。然而,这种变化以一种高度非线性的方式发生,导致在驱动器输出响应中表现出显著的迟滞特性,在相同的输入条件下,sma驱动器的输出位移或者应力可以为不同的值,具有多值映射性。sma的非线性、不对称、迟滞等特性导致了驱动器运动控制的延迟和不准确,严重影响驱动性能。
2、目前常用的控制策略主要有前馈控制、反馈控制以及复合控制。对于sma内部的迟滞非线性,可以设计前馈控制,根据所建立的迟滞模型得到迟滞逆模型,采用逆模型补偿sma驱动系统中的迟滞效应,使sma驱动系统输入输出之间呈线性关系。前馈控制策略原理简单,但在实际应用中容易受到外界干扰的影响,仅仅依靠前馈控制不能保证sma驱动系统的稳定性,导致跟踪性能下降。反馈控制不需要构建迟滞逆模型,在设计控制参数过程中不受物理参数的影响,但是难以实现满意的控制效果。因此,复合控制策略结合前馈控制与反馈控制的优势,在sma驱动系统轨迹跟踪控制中应用广泛。设计前馈控制补偿sma驱动系统的非线性,反馈控制抑制前馈补偿误差,实现闭环控制,以提高抗干扰能力。反馈控制设计常用pid控制、自适应控制、滑模控制、鲁棒控制以及动态面控制等,神经网络、模糊逻辑系统具有强大的逼近能力,在迟滞非线性控制设计中也能取得很好的效果。
3、实际控制过程中广泛存在外部扰动、未建模的动力学和不确定性,都可能导致驱动性能下降甚至不稳定。由于扰动观测器具有改善控制性能的良好特性,因此被广泛用于估计许多实际控制中的各种扰动和参数不确定性。
技术实现思路
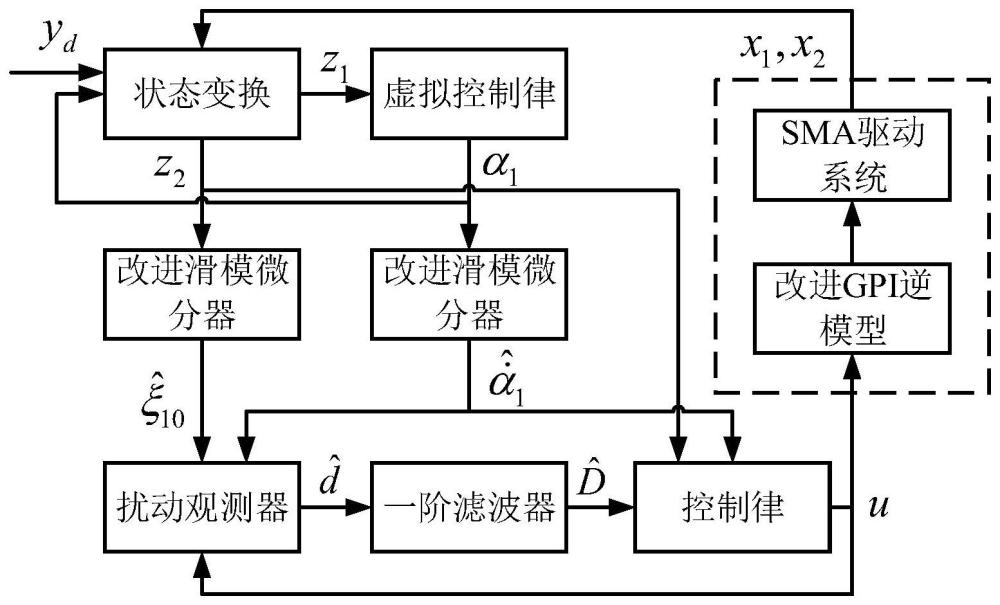
1、本发明的目的是针对存在于sma驱动系统输入输出之间的迟滞非线性,提出一种基于扰动观测器的自适应跟踪控制方法,将一阶滑模微分器与动态面控制技术相结合,提高输出的跟踪精度。基于改进的gpi模型构建迟滞逆模型,设计前馈控制器补偿迟滞效应;设计自适应动态面控制器实现输出反馈,保证闭环稳定性,提高控制的抗干扰性能。
2、本发明的目的可以通过采取如下技术方案达到:
3、一种基于sma柔性驱动穿刺装置的自适应动态面控制方法,所述自适应动态面控制方法包括以下步骤:
4、s1、建立sma驱动系统,设定被驱动部件为一个可自由滑动且安装有穿刺针和拉压力传感器的滑块,滑块左右两边分别通过偏置弹簧和sma丝连接至基座两端,实现偏置式驱动结构,当给sma丝两端施加电压使其温度变化,在sma丝牵引力和弹簧拉力共同作用下实现往复运动,滑块的位移作为sma驱动系统的输出位移,通过激光位移传感器测量得到,当sma丝大于弹簧拉力时,安装在滑块上的穿刺针跟随滑块运动并刺入硅胶材料中,通过拉压力传感器测量穿刺力的变化,穿刺事件表现为穿刺针受力稳定上升到3~5牛顿的峰值,然后迅速下降,保持稳定;
5、s2、建立sma柔性驱动穿刺装置的动力学方程,表达式如下:
6、
7、其中,x(t)是滑块的位移,和分别为x(t)的一阶求导和二阶求导,v为sma柔性驱动穿刺装置的输入电压信号,σ1、σ2、δ1、δ2分别是sma柔性驱动穿刺装置内部机电特性的第一参数、第二参数、第三参数和第四参数,p[v](t)表示sma内部的迟滞特征,fn(x)是穿刺针受到的阻力,表达式如下:
8、
9、其中,x和分别是x(t)和的简称,x0为硅胶材料组织刺破时穿刺针的位移,a1、a2分别是描述穿刺过程刚性力特征的第一参数和第二参数,b1、b2分别是描述穿刺过程摩擦力和切割力特征的第一参数和第二参数,
10、令x1=x,式(1)的状态空间表达式为:
11、
12、其中,x1为sma驱动系统输出位移,x2为sma驱动系统中滑块的运动速度,表示状态向量,d(t)表示外部干扰和未建模动力学;
13、s3、设计自适应动态面控制器,定义跟踪误差:
14、z1=x1-yd (4)
15、其中,yd为期望轨迹,
16、定义虚拟控制律为:
17、
18、其中,k1是虚拟控制律中调节跟踪误差的比例系数,为yd的一阶求导,
19、定义新的状态变量:z2=x2-α1,有:
20、
21、其中,d为d(t)的简称,为z2的一阶求导,f(x2)为关于状态向量的已知非线性函数,u为待设计的控制律,为虚拟控制律的一阶求导,
22、利用如下第一一阶滑模微分器,定义辅助变量ξ10估计式(6)中的
23、
24、其中,η10、η11和ξ10分别是第一一阶滑模微分器实现近似估计能力的第一、第二和第三状态,分别是η10、η11的一阶求导,τ10>0、τ11>0分别是第一一阶滑模微分器调节估计误差的第一参数和第二参数,引入双曲正切函数定义ξ10的估计值为:
25、
26、其中,ω10是第一一阶滑模微分器的状态估计函数(8)用于调节估计误差的第一参数,
27、利用如下第二一阶滑模微分器,定义辅助变量π20估计式(6)中的
28、
29、其中,θ10、θ11和π20分别是第二一阶滑模微分器实现近似估计能力的第一、第二和第三状态,分别是θ10、θ11的一阶求导,μ20>0、μ21>0分别是第二一阶滑模微分器调节估计误差第一参数和第二参数,引入双曲正切函数,的估计值定义为:
30、
31、其中,ω21是第二一阶滑模微分器的状态估计函数(10)用于调节估计误差的第一参数,
32、定义扰动观测器为:
33、
34、其中,为扰动估计值,引入一阶滤波器对扰动估计值做滤波处理:
35、
36、其中,τ为一阶滤波器常数,为一阶滤波器的输出,为的一阶求导,
37、定义动态面控制器的控制律为:
38、
39、其中,k2、λ分别是控制律用于调节跟踪误差的第一参数和第二参数;
40、s4、根据步骤s3中动态面控制器的虚拟控制律、扰动观测器和动态面控制器的控制律对sma柔性驱动穿刺装置进行控制,实现对期望轨迹的准确跟踪。
41、进一步地,步骤s2所述的在硅胶材料穿刺过程中,穿刺针与硅胶材料组织之间的相互作用力可以分为刚性力、切割力和摩擦力三个部分。在硅胶材料组织刺破前阶段,穿刺力表现为刚性力,可以采用二次函数进行拟合;当穿刺针刺破硅胶材料组织表面,刺入硅胶材料组织内部,穿刺针与硅胶材料组织之间产生切割力和摩擦力,可以采用线性方程进行拟合。
42、进一步地,步骤s2所述sma内部的迟滞特征具有饱和性、非对称性和频率相关性,基于gpi模型的迟滞算子,引入一个关于输入信号频率的动态阈值函数,以表征sma迟滞特性的频率相关性,所述sma内部的迟滞特征p[v](t)定义为:
43、
44、其中,h[v](t)为输入形状函数,p0为输入形状函数的权重系数,v(t)为改进gpi模型的输入,v为v(t)的简称,为v(t)的一阶求导,n为算子个数,pj,j=1,2,...,n为算子权重,为频率相关play算子,采用一个关于输入信号频率的动态阈值函数定义为:
45、
46、其中,c1和c2分别为动态阈值函数的频率无关项的系数和频率相关项的系数,表示输入信号的频率,
47、进一步地,针对sma内部复杂的迟滞特性,基于上述改进的gpi模型构建解析逆,实现对sma驱动系统迟滞特性的补偿,从而简化控制器设计,改进gpi模型的解析逆定义为:
48、
49、其中,w(t)为改进gpi逆模型的输入,为w(t)的一阶求导,w和分别为w(t)和的简称,p-1[w](t)为改进gpi逆模型的输出,γl、γr为第一、第二包络函数,选取为双曲正切函数,分别为γl、γr的反函数,是阈值函数为的play算子,qj,j=1,2,...,n为改进gpi逆模型的算子权重,定义为:
50、
51、其中,pi,i=0,1,...,j为改进gpi模型的算子权重。
52、进一步地,所述改进gpi逆模型中采用一个频率相关的阈值函数,该阈值函数通过改进gpi模型的算子权重与阈值函数递推得到,阈值函数的计算公式为:
53、
54、
55、其中,为改进gpi逆模型的第一个算子的阈值函数,为改进gpi模型的第一个算子的阈值函数。
56、上述频率相关的改进gpi模型,基于gpi模型的广义play算子,引入一个关于输入信号频率的动态阈值函数,解决gpi模型无法表征sma迟滞行为的频率相关特性的问题,采用双曲正切函数作为包络函数,可以有效表征sma驱动器迟滞行为的饱和性和非对称性。
57、本发明相对于现有技术具有如下的优点及效果:
58、(1)本发明提出的基于sma柔性驱动穿刺装置的自适应动态面控制方法,通过在设计步骤中引入一阶滤波器,从而可以避免微分运算,解决反步设计存在的虚拟控制函数重复微分导致的复杂性爆炸问题。
59、(2)在本发明提出的控制方法中,利用一阶滑模微分器设计辅助变量来估计状态误差和虚拟控制函数的微分项,为避免符号函数的不连续性,引入双曲正切函数使信号平滑,以保证反步的可行性。
60、(3)在本发明提出的控制方法中,设计扰动观测器用于估计外部扰动、未建模的动力学和参数不确定性。考虑到在控制设计过程中复合扰动的先验知识无法精确获取,在不使用模糊逻辑系统或神经网络逼近器的情况下,可以提高闭环控制的稳定性和鲁棒性。
61、(4)本发明采用复合控制策略。利用改进的gpi模型表征sma饱和、非对称、频率相关的迟滞特征,基于改进的gpi模型构建解析逆,设计前馈控制器,以补偿sma驱动系统的迟滞非线性特性。
62、(5)为了抑制前馈补偿误差,本发明设计自适应动态面控制器作为反馈实现闭环控制,以提高控制的抗干扰性能。将一阶滑模微分器与动态面控制技术相结合,提高输出的跟踪精度,实现跟踪误差收敛。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199422.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表