用于被引导的机器人式机器或车辆的位置检测和导航设备的改进的制作方法
- 国知局
- 2024-07-31 23:57:51
本申请所涉及的发明是对机器人形式的设备的改进,其允许对设备相对于周围环境和/或相对于所述环境内其它物体所在位置的位置进行检测。特别地,本发明涉及具有自主导航系统的机器人式机器(robotic machine),诸如利用光探测和测距(lidar(lightdetection and ranging))导航系统以允许在潜在爆炸性的环境中引导机器人式机器,目的是防止或最小化设备与环境的边界和/或位于环境内的物体碰撞的风险。因此,本发明特别致力于允许在远离潜在爆炸性环境的情况下实现对设备的运动的引导,从而降低爆炸的风险和/或爆炸导致导航系统损坏的风险。
背景技术:
1、已知提供用于在爆炸性环境中使用的远程控制机器人式机器,并且申请人的专利和申请公开了此类设备的一种形式和特征。同样,用于诸如道路车辆等的可运动设备的引导装置的使用是众所周知的,并且典型地包括在一个或多个限定的方向上将信号从该设备发送到周围环境中的一个或多个发送器和设置在该设备中的检测所发送信号的返回路径的一个或者多个接收器。基于接收到的返回信号的形式,然后可以确定设备和/或所述环境内的其它物体的位置,并通过使用算法和控制系统来处理数据,允许智能地引导设备在环境内的运动,从而例如避开检测到的物体。
2、引导系统典型地包括保护外壳,从发射装置发射的信号和返回信号通过该保护外壳传递到位于外壳内的接收装置。已经发现,当保护外壳包括供信号通过的相对平坦的面板或窗时,设备的检测以及随后的定位和引导的准确性相对高。然而,当面板或窗的表面弯曲时,视差的影响导致发送的信号和接收的信号的路径的失真和改变,这反过来降低了设备的检测位置的准确性,从而降低了设备在环境内的引导。当引导设备结合到被提供用于在爆炸环境中使用的机器人式机器中时,这些不准确性会加剧,因为发送的信号和接收的信号需要通过的窗相对厚且是弯曲的。为了提供防爆炸的保护而设置了保护窗的增加的厚度,但这意味着发送的信号和接收的信号的不准确性程度增加,因此提供给机器人式机器的引导的准确性会降低到引导设备的使用可能不安全的程度。
技术实现思路
1、因此,本发明的目的是提供一种引导设备,其具有允许增强机器人式机器在环境内运动和/或对环境内其它物体的检测的形式。
2、另一个目的是提供引导设备的增强,以允许引导设备在与用于在爆炸环境中使用的机器人式机器一起使用时能够起作用,同时确保提供给引导设备的保护是充分的,而且允许机器人式机器的准确运动。
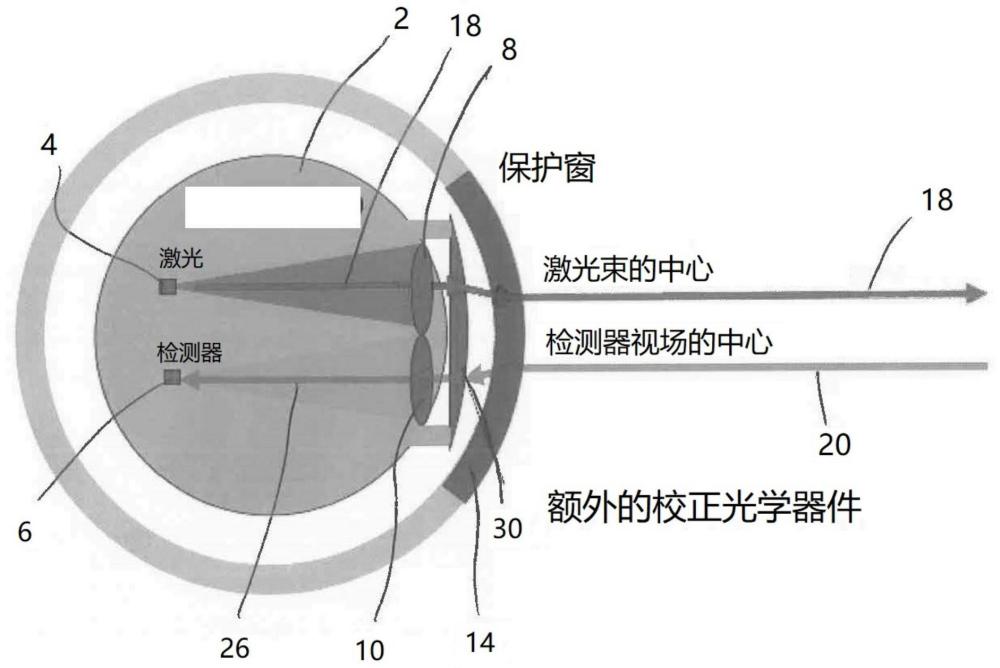
3、在本发明的第一方面中,提供了一种机器人式机器设备,其用于在环境内运动,所述机器人式机器包括运动导航系统,所述运动导航系统包括:至少一个信号发送装置,其从所述设备内部并通过窗向所述环境发射信号;至少一个接收装置,其位于所述设备内部以接收来自所述环境中的物体和/或所述环境的表面的已经穿过所述窗或另一窗的返回信号;以及信号处理装置,其用于允许所述接收的信号被处理并用于确定所述机器人式机器相对于所述物体和/或所述环境的表面的位置,并因此允许对所述设备的运动的引导,其中,至少一个校正透镜定位在所述至少一个发送装置与所述窗的中间和/或定位在所述窗与所述接收装置的中间。
4、典型地,提供校正透镜以校正或至少减少由于发送的信号和/或接收的信号通过所述窗而引起的该发送的信号和/或接收的信号的任何失真。这进而意味着信号处理的准确性得到了改善,进而机器人式机器的位置检测的准确性和由此产生的机器人式机器的引导远程控制也得到了改善。
5、典型地,所述发送的信号是激光束。
6、典型地,所述窗具有内表面和外表面,并且所述内表面和所述外表面中的一者或两者是弯曲的。
7、在一个实施方式中,所述窗是具有纵轴线的柱面形,所述纵轴线与头的中心轴线共面,在一个实施方式中,发送器、接收器和校正透镜位于所述头中并且能够绕所述头旋转。
8、在一个实施方式中,所述运动导航系统是自主导航系统,并且在一个实施方式中是lidar引导设备和系统。在一个实施方式中,所述头是lidar设备的一部分。
9、典型地,所述窗被设置成以使得所述头位于所述窗的后面的方式位于所述设备内。
10、在一个实施方式中,所述窗由第一层和第二层形成。在一个实施方式中,所述第一层用作红外带通滤波器窗,而所述第二层被设置为保护层,以便使损坏窗的风险最小化。
11、典型地,所述第一层形成窗的内表面,所述第二层形成窗的外表面。
12、在一个实施方式中,所述第一层和所述第二层通过气隙分开。
13、在一个实施方式中,所述校正透镜是柱面透镜。优选地,透镜是平-凸柱面校正透镜。
14、在一个实施方式中,为信号发送提供第一校正透镜,为信号接收提供第二校正透镜。可替换地,一个校正透镜被定位成兼用于信号发送和接收装置。
15、在一个实施方式中,提供另外的光学透镜,使得在信号发送装置和所述校正透镜之间设置另外的透镜,并且在所述光学校正透镜和信号接收装置之间设置另外的透镜。典型地,所述至少一个校正透镜被定位在任何所述另外的透镜和所述窗的中间。
16、在一个实施方式中,所述头设置有配重,所述配重典型地在所述头的与所述校正透镜所在侧相反的一侧。配重的重量典型地被选择用于抵消校正透镜的重量,从而在使用时确保头的均匀旋转。
17、典型地,机器人式机器包括自主导航设备,该自主导航设备连接到驱动装置的控制部,该驱动装置连接到多个轮子或辊子以使机器人式机器能够行进经过环境的表面,并且控制装置允许参考来自自主导航设备的数据对机器人式机器进行引导,如本文所述。
18、在本发明的另一个方面中,提供了一种运动导航系统,其用于允许远程控制机器人式机器在环境内的运动,所述系统包括:至少一个信号发送装置,其从所述机器人式机器的内部并通过窗向所述环境发射信号;至少一个接收装置,其用于在所述机器人式机器内部接收返回信号,所述返回信号来自所述环境中的物体和/或所述环境的表面并已经穿过所述窗或另一窗;以及信号处理装置,其用于允许所述接收的信号被处理并用于确定所述机器人式机器相对于所述物体和/或所述环境的表面的位置,其中,至少一个校正透镜定位在所述至少一个发送装置与所述窗的中间和/或在所述窗与所述接收装置之间。
19、在本发明的另一个方面中,提供了一种用于远程控制机器人式机器在环境中的运动的方法,所述方法包括:从位于所述机器内的信号发送装置并通过窗向所述环境发射信号的步骤,位于所述机器内的至少一个接收装置用于接收返回信号,所述返回信号来自所述环境中的物体和/或所述环境的表面并已经穿过所述窗或另一窗;以及处理所述接收到的信号以确定所述机器人式机器相对于所述物体和/或所述环境的表面的位置的步骤;以及,将至少一个校正透镜定位在所述至少一个发送装置和所述窗之间和/或在所述窗和所述接收装置之间的步骤。
技术特征:1.一种机器人式机器设备,其用于在环境内运动,所述机器人式机器包括运动导航系统,所述运动导航系统包括:至少一个信号发送装置,其从所述设备内部并通过窗向所述环境发射信号;至少一个接收装置,其位于所述设备内部以接收来自所述环境中的物体和/或所述环境的表面的已经穿过所述窗或另一窗的返回信号;以及信号处理装置,其用于允许所述接收的信号被处理并用于确定所述机器人式机器相对于所述物体和/或所述环境的表面的位置,并因此允许对所述设备的运动的引导,
2.根据权利要求1所述的设备,其中,除了在所述发送装置和窗之间以及在所述接收装置和窗之间设置的另外的光学透镜之外,还设置所述至少一个校正透镜。
3.根据权利要求2所述的设备,其中,所述至少一个校正透镜位于所述另一光学透镜和所述窗和/或其它窗的中间。
4.根据权利要求1至3所述的设备,其中,所述至少一个校正透镜被设置用于校正或至少减少由于发送的信号和/或接收的信号通过所述至少一个窗引起的发送的信号和/或接收的信号的失真。
5.根据前述权利要求中任一项所述的设备,其中,所述至少一个校正透镜是柱面透镜。
6.根据权利要求5所述的设备,其中,所述至少一个校正透镜是平-凸柱面校正透镜。
7.根据前述权利要求中任一项所述的设备,其中,所述校正透镜被设置并位于所述发送装置和所述光学透镜之间,并且在所述光学透镜和所述接收装置之间设置并定位有校正透镜。
8.根据权利要求1至6中任一项所述的设备,其中,所述校正透镜被定位成使得该透镜被定位在所述信号发送装置和所述窗以及所述信号接收装置和所述窗的中间。
9.根据前述权利要求中任一项所述的设备,其中,所述发送的信号是激光束。
10.根据前述权利要求中任一项所述的设备,其中,所述窗具有内表面和外表面,并且所述内表面和所述外表面中的至少一者是弯曲的。
11.根据前述权利要求中任一项所述的设备,其中,所述至少一个窗由至少第一层和第二层形成。
12.根据权利要求11所述的设备,其中,第一层被设置为红外带通滤波器,并且第二层被设置为保护层。
13.根据权利要求11至12中任一项所述的设备,其中,所述第一层形成所述窗的内表面,并且所述第二层形成所述窗的外表面。
14.根据权利要求11至13中任一项所述的设备,其中,所述第一层和所述第二层通过气隙分开。
15.根据前述权利要求中任一项所述的设备,其中,头位于所述设备的内部。
16.根据权利要求15所述的设备,其中,所述发送装置、接收装置和光学透镜的任一者或任意组合位于所述头上。
17.根据权利要求15至16中任一项所述的装置,其中,所述至少一个窗是纵向轴线与所述头的中心轴线共面的柱面形的。
18.根据权利要求17所述的装置,其中,至少所述发送装置和接收装置能够绕所述中心轴线旋转。
19.根据权利要求18所述的装置,其中,所述头和光学透镜也绕所述中心轴线旋转。
20.根据权利要求15至19中任一项所述的设备,其中,所述头是用于所述运动导航系统的保护外壳,或者被设置为所述保护外壳的一部分。
21.根据权利要求15至20中任一项所述的设备,其中,所述头设置有配重,所述配重位于所述头的与所述至少一个光学透镜所在侧相反的一侧。
22.根据权利要求21所述的设备,其中,所述配重的重量被选择为抵消所述至少一个光学透镜的重量,并且在使用时允许所述头基本均匀地旋转。
23.根据前述权利要求中任一项所述的设备,其中,所述运动导航系统连接到控制驱动装置,所述控制驱动装置连接到多个轮或辊,以使得所述设备能够在所述环境的表面上被引导行进,并且允许远离所述设备的位置执行对运动的控制和引导。
24.据前述权利要求中任一项所述的装置,其中,所述运动导航系统是自主运动导航系统。
25.根据权利要求24所述的设备,其中,所述自主运动导航系统是光探测和测距(lidar)导航系统。
26.一种运动导航系统,其用于允许远程控制机器人式机器在环境内的运动,所述系统包括:至少一个信号发送装置,其从所述机器人式机器的内部并通过窗向所述环境发射信号;至少一个接收装置,其用于在所述机器人式机器内部接收返回信号,所述返回信号来自所述环境中的物体和/或所述环境的表面并已经穿过所述窗或另一窗;以及信号处理装置,其用于允许所述接收的信号被处理并用于确定所述机器人式机器相对于所述物体和/或所述环境的表面的位置,
27.一种用于远程控制机器人式机器在环境中的运动的方法,所述方法包括:从位于所述机器内的信号发送装置并通过窗向所述环境发射信号的步骤,位于所述机器内的至少一个接收装置用于接收返回信号,所述返回信号来自所述环境中的物体和/或所述环境的表面并已经穿过所述窗或另一窗;以及处理所述接收到的信号以确定所述机器人式机器相对于所述物体和/或所述环境的表面的位置的步骤;以及,将至少一个校正透镜定位在所述至少一个发送装置和所述窗之间和/或在所述窗和所述接收装置之间的步骤。
技术总结本发明涉及提供机器人式机器设备、用于所述机器人式机器的运动导航系统、和在环境内、并且最典型地在受限且潜在危险的环境内为所述机器人式机器提供引导的方法。提供运动导航以在环境内操作,并从位于所述环境之外的人员远程提供引导。该设备包括通过所述机器的窗发射至少一个信号的装置和通过所述窗或另一窗接收来自所述环境中的物体或所述环境的表面的反射返回信号的装置,以便提供数据来确定机器人式机器的位置并引导机器在环境中的运动。至少一个光学透镜设置在信号发送装置与窗和/或信号接收装置与所述窗或另一窗的中间,以允许减少或避免由通过所述至少一个窗的信号引起的任何失真,从而允许对设备的更准确的引导。技术研发人员:罗纳德·舍尔,蒂姆·克罗斯,彼得·维舒尔受保护的技术使用者:伊艾克斯机器人科技有限公司技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240730/199412.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表