用于跨越障碍物的自动行驶设备控制方法和行驶设备与流程
- 国知局
- 2024-07-31 23:57:04
本发明涉及自动越障,尤其涉及一种用于跨越障碍物的自动行驶设备控制方法和行驶设备。
背景技术:
1、随着科技的发展,自动行驶设备逐步进入人类生活的方方面面,其应用场景越来越广并且面临越来越多需要越障的复杂情况,例如,当酒店使用服务机器人或工厂使用自动引导车进行跃层服务,由于电梯传感器故障、超载或维护不足等问题,常出现电梯轿厢停靠不准的情况,使得电梯轿厢内外形成较明显的高度差,而某些地方为了保护电梯,会在电梯底部放置一块面板以防止电梯被压坏,这使得电梯即使在正常停靠情况下仍与外部存在高度差,使得自动行驶设备进入困难或无法进入,影响其正常工作;同时,当自动行驶设备在商场内穿梭时,商场内的电线保护罩以及地面灯座等同样存在高度会影响设备前进。
技术实现思路
1、本发明针对现有技术中的不足,提供了一种用于跨越障碍物的自动行驶设备控制方法,所述自动行驶设备包括底盘、布置于底盘上的前后多组车轮、以及分别安装在所述底盘前后部的两组升降杆,各组升降杆被配置为能够向地面方向伸展来顶起同方向的车轮离开地面,所述自动行驶设备控制方法包括如下步骤:
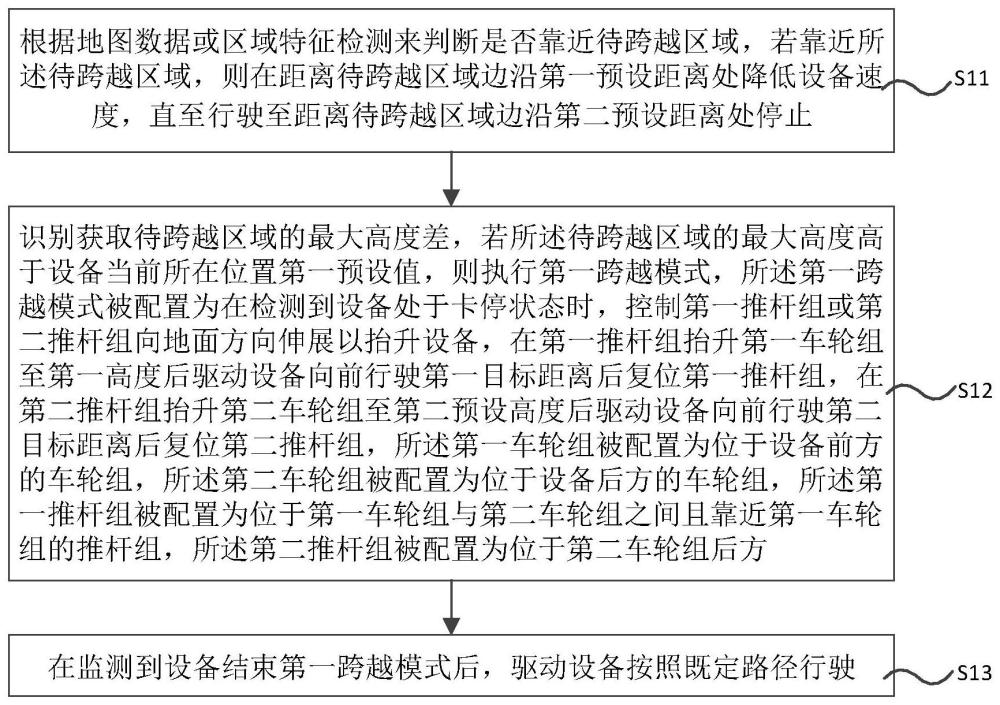
2、根据地图数据或区域特征检测来判断是否靠近待跨越区域,若靠近所述待跨越区域,则在距离待跨越区域边沿第一预设距离处降低设备速度,直至行驶至距离待跨越区域边沿第二预设距离处停止;
3、识别获取待跨越区域的最大高度差,若所述待跨越区域的最大高度高于设备当前所在位置第一预设值,则执行第一跨越模式,所述第一跨越模式被配置为在检测到设备处于卡停状态时,控制第一推杆组或第二推杆组向地面方向伸展以抬升设备,在第一推杆组抬升第一车轮组至第一高度后驱动设备向前行驶第一目标距离后复位第一推杆组,在第二推杆组抬升第二车轮组至第二预设高度后驱动设备向前行驶第二目标距离后复位第二推杆组,所述第一车轮组被配置为位于设备前方的车轮组,所述第二车轮组被配置为位于设备后方的车轮组,所述第一推杆组被配置为位于第一车轮组与第二车轮组之间且靠近第一车轮组的推杆组,所述第二推杆组被配置为位于第二车轮组后方;
4、在监测到设备结束第一跨越模式后,驱动设备按照既定路径行驶。
5、优选的,所述第一跨越模式具体被配置为包括:控制设备以低速向待跨越区域行驶,并在检测到设备处于卡停状态时,向地面方向伸展第一推杆组以抬升设备第一车轮组至第一高度;驱动设备向待跨越区域行驶第一目标距离后复位第一推杆组;驱动设备以低速继续向待跨越区域行驶,直至设备再次处于卡停状态,向地面方向伸展第二推杆组以抬升设备第二车轮组至第二高度;驱动设备行驶第二目标距离后复位第二推杆组。
6、优选的,当自动行驶设备使用电梯进行跃层服务时,所述待跨越区域为电梯轿厢与电梯间结合区域,所述自动行驶设备控制方法还包括:根据地图数据或区域特征检测来判断是否靠近电梯门,若靠近电梯门,则在距离电梯门第一预设距离处降低设备速度,直至行驶至距离电梯门第二预设距离处停止,向电梯控制模块发送第一请求,并在接收到请求回应后等待电梯门开启,所述第一请求被配置为控制电梯轿厢移动至当前楼层并开启电梯门;在电梯门开启后识别获取电梯轿厢内底面与电梯门外地面的高度差,若所述电梯轿厢内底面高于电梯门外地面第一预设值则执行第一跨越模式;在监测到设备结束第一跨越模式后,驱动设备驶入电梯轿厢直至设备整体进入电梯轿厢后停止运行,并向电梯控制模块发送第二请求,所述第二请求被配置为向电梯控制器发送的驱动电梯轿厢移动至所需楼层的请求。
7、优选的,在电梯门开启后识别获取电梯轿厢内底面与电梯门外地面的高度差,若所述电梯轿厢内底面高于电梯门外地面第一预设值则执行第一跨越模式具体包括:若电梯轿厢内底面高于电梯门外地面第二预设值,则发送校准指令至电梯间使电梯间进行自动校准,所述校准指令被配置为向电梯控制器发送的驱动电梯轿厢向下运行至最底端后返回当前楼层的请求。识别校准后电梯门的最大高度差,若所述电梯门的最大高度高于电梯门外地面第二预设值则发送释放指令,否则判断所述电梯门的最大高度是否高于电梯门外地面的第一预设值,如果高于预设值则进入第一跨越模式,如果不高于则驱使设备远离电梯间。
8、优选的,还包括:识别电梯轿厢尺寸,若电梯轿厢尺寸达到设备可转身要求则驱使设备旋转预设角度;在接收到电梯控制模块发送的到达指令且电梯轿厢门开启后,识别获取电梯轿厢内底面与当前停靠楼层的电梯厅地面的高度差,如果所述电梯轿厢内底面低于当前停靠楼层的电梯厅地面第一预设值,则进入第一跨越模式;在监测到设备结束第一跨越模式后,驱使设备驶出电梯轿厢。
9、优选的,还包括第二跨越模式,所述自动行驶设备控制方法具体包括:根据地图数据或区域特征检测来判断是否靠近待跨越区域,若靠近所述待跨越区域,则旋转设备至预设角度,并在距离待跨越区域边沿第三预设距离处降低设备速度,直至行驶至距离待跨越区域边沿第四预设距离处停止;识别获取待跨越区域的最大高度差,若所述待跨越区域的最大高度低于设备当前所在位置第一预设值,则执行第二跨越模式,所述第二跨越模式被配置为在第二推杆组向下伸展至第三高度后驱动设备向前行驶第三目标距离并复位第二推杆组,在第一推杆组抬升设备至第四高度后驱动设备向前行驶第四目标距离并复位第一推杆组;在监测到设备结束第二跨越模式后,驱使设备远离待跨越区域。
10、本发明还公开了一种行驶设备,包括车辆控制器、底盘、布置于底盘上的前后多组车轮、以及分别安装在所述底盘前后部的两组升降杆,各组升降杆被配置为能够向地面方向伸展来顶起同方向的车轮离开地面,所述车辆控制器包括区域检测模块、跨越控制模块和区域远离模块,其中区域靠近模块,用于根据地图数据或区域特征检测来判断是否靠近待跨越区域,若靠近所述待跨越区域,则在距离待跨越区域边沿第一预设距离处降低设备速度,直至行驶至距离待跨越区域边沿第二预设距离处停止;区域跨越模块,用于识别获取待跨越区域的最大高度差,若所述待跨越区域的最大高度高于设备当前所在位置第一预设值,则执行第一跨越模式,所述第一跨越模式被配置为在检测到设备处于卡停状态时,控制第一推杆组或第二推杆组向地面方向伸展以抬升设备,在第一推杆组抬升第一车轮组至第一高度后驱动设备向前行驶第一目标距离后复位第一推杆组,在第二推杆组抬升第二车轮组至第二预设高度后驱动设备向前行驶第二目标距离后复位第二推杆组,所述第一车轮组被配置为位于设备前方的车轮组,所述第二车轮组被配置为位于设备后方的车轮组,所述第一推杆组被配置为位于第一车轮组与第二车轮组之间且靠近第一车轮组的推杆组,所述第二推杆组被配置为位于第二车轮组后方;区域远离模块,用于在监测到设备完成第一跨越模式后,驱动设备按照既定路径行驶。
11、优选的,所述第一跨越模式具体被配置为包括:控制设备以低速向待跨越区域行驶,并在检测到设备处于卡停状态时,向地面方向伸展第一推杆组以抬升设备第一车轮组至第一高度;驱动设备向待跨越区域行驶第一目标距离后复位第一推杆组;驱动设备以低速继续向待跨越区域行驶,直至设备再次处于卡停状态,向地面方向伸展第二推杆组以抬升设备第二车轮组至第二高度;驱动设备行驶第二目标距离后复位第二推杆组。
12、优选的,当自动行驶设备使用电梯进行跃层服务时,所述待跨越区域为电梯轿厢与电梯间结合区域,所述自动行驶设备控制方法还包括检测模块、跨越模块以及驶入模块,其中检测模块,用于根据地图数据或区域特征检测来判断是否靠近电梯门,若靠近电梯门,则在距离电梯门第一预设距离处降低设备速度,直至行驶至距离电梯门第二预设距离处停止,向电梯控制模块发送第一请求,并在接收到请求回应后等待电梯门开启,所述第一请求被配置为控制电梯轿厢移动至当前楼层并开启电梯门;跨越模块,用于在电梯门开启后识别获取电梯轿厢内底面与电梯门外地面的高度差,若所述电梯轿厢内底面高于电梯门外地面第一预设值则执行第一跨越模式;驶入模块,用于在监测到设备结束第一跨越模式后,驱动设备驶入电梯轿厢直至设备整体进入电梯轿厢后停止运行,并向电梯控制模块发送第二请求,所述第二请求被配置为向电梯控制器发送的驱动电梯轿厢移动至所需楼层请求。
13、本发明还公开了一种车辆控制装置,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一所述用于跨越障碍物的自动行驶设备控制方法的步骤。
14、本发明还公开了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一所述用于跨越障碍物的自动行驶设备控制方法的步骤。
15、本发明公开的用于跨越障碍物的自动行驶设备控制方法和行驶设备,其自动行驶设备内包含底盘、布置于底盘上的前后多组车轮以及安装于在所述底盘前后部的两组升降杆,其中,该两组升降杆均可向地面方向伸展以顶起同方向车轮离开地面,当设备识别到待跨越区域后,逐渐降低速率直至在待跨越区域前停止,并通过识别待跨越区域的最大高度差判断是否需对其进行跨越,若需要则执行第一跨越模式,分别伸展两组升降杆以抬升设备车轮至一定高度,从而使设备顺利通过障碍物,其中,该第一跨越模式被配置为在检测到设备处于卡停状态时,控制第一推杆组或第二推杆组向地面方向伸展以抬升设备,通过该种方式,避免障碍物阻挡设备前进路程、妨碍其正常工作,提高设备工作效率。
16、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199349.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。