多约束下机器人同步学习和运动与力混合控制方法及系统
- 国知局
- 2024-07-31 23:57:03
本发明涉及机器人智能控制,具体涉及一种多约束下机器人同步学习和运动与力混合控制方法及系统。
背景技术:
1、近年来,机器人操纵器在工业、航空航天、军事和医疗应用中都得到了广泛的应用,尤其在复杂环境中,同时控制末端执行器位置和力以实现精确跟踪成为一项重要挑战。机器人在复杂环境中需要持续交互时,同时追求运动控制和力控制被证明是有利的。
2、导纳控制是一种广泛应用的方法,旨在使机器人能够以一种调节和响应的方式与环境进行互动。这种控制方法强调机器人与环境的力交互,导纳控制方法在协调机器人与环境互动方面起到关键作用,使机器人能够适应不确定性和动态变化的外部力,增强了机器人应对不确定性的能力。为了实现卓越的控制性能,机器人操纵臂的控制策略必须在精度、适应性和解决关键约束方面表现出色,包括避障、末端执行器方向保持和遵守物理限制。然而,许多现有的控制器过于强调位置精度,而忽略了姿态精度。在生产过程中,机器人操纵臂常常面临运动学上的不准确和偏差。数据驱动的方法已被证明在实时参数估计中有效,通过实现精确估计减轻了不准确和偏差的影响。在重复机器人任务中,关节漂移可能会影响性能。现有的关节无漂移方案在同时管理联合漂移和任务约束方面存在困难。
3、一些现有技术采用了时变二次规划框架,通过在不同时间点动态调整权重矩阵,以适应系统的动态变化。这种框架可以在运动和力量之间进行平衡,并在不同的工作阶段调整控制策略。为了更全面地处理多重约束,一些现有技术引入了加速度级别的约束,并在速度级别上做出决策变量。这有助于更好地平衡系统的动态性能和遵守各种实际约束条件。鉴于机器人在长时间和密集使用中可能遭遇运动学上的不准确和偏差,一些现有技术引入了数据驱动的方法。这种方法通过实时参数估计,利用已知信息,提高了机器人运动学参数的准确性。针对重复任务中可能发生的关节漂移问题,一些现有技术尝试通过不同的控制手段,如联合无漂移方案,来纠正这一现象,以维持机器人的精确性和稳定性。
4、现有技术普遍关注机器人操纵臂的位置精度,这在某些情况下可能忽略了对姿态精度的需求。在复杂环境中,特别是在需要持续交互的任务中,仅关注位置精度可能无法满足对姿态控制的更高要求。现有控制策略在多重约束的情况下表现不足,例如在避障、末端执行器方向保持和遵守物理限制等方面,缺乏一个统一的方法来综合处理这些约束,可能导致在复杂环境中执行任务时的性能下降。长时间和密集使用可能导致机器人操纵臂在运动学上出现不准确和偏差,现有技术方案未充分考虑这一问题,缺乏有效的方法来处理运动学的不准确性,可能影响机器人在实际生产过程中的性能。此外,现有的联合无漂移方案在同时管理联合漂移和任务约束方面存在困难,可能未能有效解决关节漂移问题,这可能导致在重复机器人任务中性能的下降和操纵臂的损坏。总体而言,现有技术致力于克服机器人运动与力混合控制中的各种挑战,从而实现机器人在不同环境和任务中更为灵活、高效、稳定的表现。然而,这些方案在处理多重约束、运动学不准确性和关节漂移等方面仍存在一些局限性。
技术实现思路
1、本发明的目的在于针对上述现有技术中的问题,提供一种多约束下机器人同步学习和运动与力混合控制方法及系统,以全面提升机器人在复杂环境中执行任务的性能和鲁棒性。
2、为了实现上述目的,本发明有如下的技术方案:
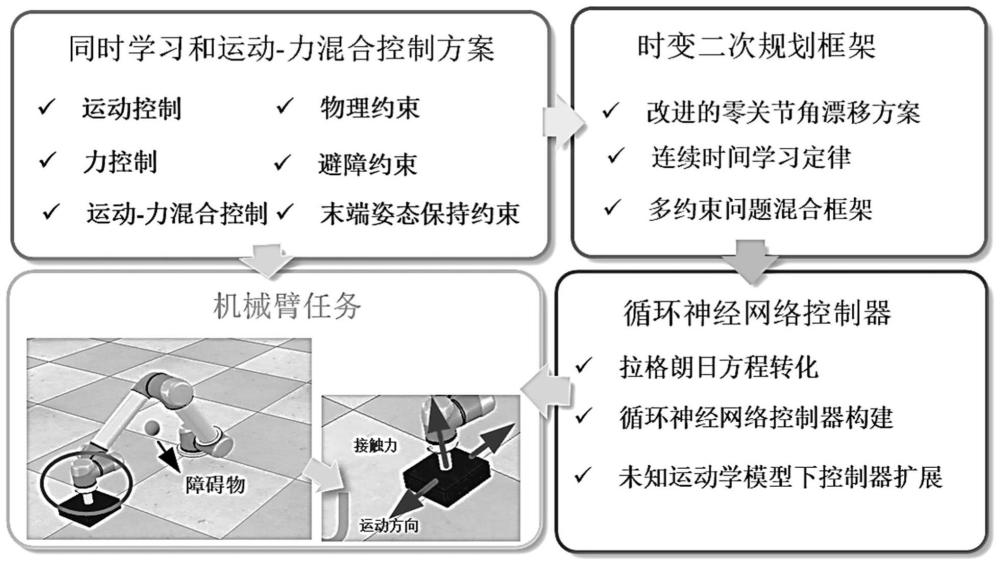
3、第一方面,提供一种多约束下机器人同步学习和运动与力混合控制方法,包括:
4、根据机器人的运动学方程,将不同层次的物理约束分别转化为速度级和加速度级的不等式约束;
5、结合转化为速度级和加速度级的不等式约束,建立机器人的运动与力混合控制模型;
6、基于所述机器人的运动与力混合控制模型进行机器人重复运动规划,采用一个性能指标处理关节漂移;
7、结合所有的约束及关节漂移处理条件建立统一的多目标时变二次规划模型;
8、对统一的多目标时变二次规划模型利用基于递归神经网络的控制器,自定义约束比例和权重以匹配任务需求,求解最优解,得到多约束下的机器人混合控制方案。
9、作为一种优选的方案,在所述根据机器人的运动学方程,将不同层次的物理约束分别转化为速度级和加速度级的不等式约束的步骤中,约束包括机械臂的物理约束、避障约束以及末端执行器姿态保持约束。
10、作为一种优选的方案,所述机械臂的物理约束的数学表达式为:
11、
12、
13、式中,表示关节角加速度,ηmax定义为和的最小绝对值;为t时刻的关节角速度,为最小关节角加速度,为最大关节角加速度。
14、作为一种优选的方案,定义向量障碍物点b定义为距离机械手最近的任意形状障碍物的几个简化点,临界点a定义为危险区域内连杆或连杆延伸部分上最近的点,符号sgn(·)定义为标量sgn函数,(xa,ya,za)和(xb,yb,zb)分别为点a和b的坐标;
15、所述避障约束为临界点与障碍物点之间不重叠,避障约束的数学表达式为:
16、
17、式中,表示障碍点的雅克比矩阵,表示临界点的雅可比矩阵;操作符◇表示为a◇b=[a1b1,a2b2,…,albl]t,a=[a1,a2,…,al]定义为列向量,b=[b1,b2,…,bl]t定义为矩阵;为关节角速度。
18、作为一种优选的方案,旋转矩阵r=[n,o,a]表示末端执行器相对于基坐标系的姿态,式中n=[n1,n2,n3]t,o=[o1,o2,o3]t,a=[a1,a2,a3]t表示构成矩阵r的列向量;
19、所述末端执行器姿态保持约束的数学表达式为:
20、
21、式中,是的雅可比矩阵;
22、基准坐标系下的机械臂末端执行器的接触力fb和跟踪误差χb分别为:
23、
24、式中,db=rd-ra表示笛卡尔坐标系下的跟踪误差,rd为期望末端轨迹,ra为实际末端轨迹;ε为刚度系数,ε>0;对角矩阵γ用于解耦接触力和沿不同轴的跟踪误差,每个矩阵元素独立地影响各自的轴;根据预定的接触面是平坦的还是不规则弯曲的,定制对角矩阵γ以匹配特定的表面结构和曲率。
25、作为一种优选的方案,在所述结合转化为速度级和加速度级的不等式约束,建立机器人的运动与力混合控制模型的步骤中,机器人的运动与力混合控制模型的数学表达式为:
26、
27、式中,表示方向矩阵,nd表示期望矩阵,nd=[fd,0]t,fd表示期望接触力,k>0;为期望末端速度,为期望矩阵的导数。
28、作为一种优选的方案,在所述基于所述机器人的运动与力混合控制模型进行机器人重复运动规划,采用一个性能指标处理关节漂移的步骤中,性能指标为其中d=λ(q-q0),λ>0,q0表示关节的初始状态;q为关节角度。
29、作为一种优选的方案,在所述结合所有的约束及关节漂移处理条件建立统一的多目标时变二次规划模型的步骤中,所述统一的多目标时变二次规划模型的数学表达式为:
30、
31、
32、
33、
34、
35、
36、式中,d为关节角度和期望角度的偏差,j为雅可比矩阵。
37、作为一种优选的方案,在所述对统一的多目标时变二次规划模型利用基于递归神经网络的控制器,自定义约束比例和权重以匹配任务需求,求解最优解,得到多约束下的机器人混合控制方案的步骤中,利用基于递归神经网络的控制器,自定义约束比例和权重以匹配任务需求,求解最优解的数学表达式如下:
38、
39、
40、
41、
42、式中,δ为用于调节收敛速率的设计参数,δ>0;为投影函数,py为投影函数,为关节角加速度,均为拉格朗日乘子,g为非负松弛项。
43、第二方面,提供一种多约束下机器人同步学习和运动与力混合控制系统,包括:
44、物理约束转化模块,用于根据机器人的运动学方程,将不同层次的物理约束分别转化为速度级和加速度级的不等式约束;
45、运动与力混合控制模型建立模块,用于结合转化为速度级和加速度级的不等式约束,建立机器人的运动与力混合控制模型;
46、关节漂移处理模块,用于基于所述机器人的运动与力混合控制模型进行机器人重复运动规划,采用一个性能指标处理关节漂移;
47、多目标时变二次规划模型建立模块,用于结合所有的约束及关节漂移处理条件建立统一的多目标时变二次规划模型;
48、机器人混合控制方案求解模块,用于对统一的多目标时变二次规划模型利用基于递归神经网络的控制器,自定义约束比例和权重以匹配任务需求,求解最优解,得到多约束下的机器人混合控制方案。
49、相较于现有技术,本发明至少具有如下的有益效果:
50、本发明多约束下机器人同步学习和运动与力混合控制方法实现了全面优化位置和姿态控制,结合所有的约束及关节漂移处理条件建立统一的多目标时变二次规划模型,对统一的多目标时变二次规划模型利用基于递归神经网络的控制器,自定义约束比例和权重以匹配任务需求,求解最优解,得到多约束下的机器人混合控制方案,能够全面优化位置和姿态控制,以确保机器人操纵臂在复杂环境中能够同时实现精确的位置和姿态跟踪。本发明方法的关键目标之一是综合处理多重约束,包括但不限于避障、末端执行器方向保持和遵守物理限制,通过引入同时学习和运动与力混合控制方案,实现对多种实际约束的高效满足。通过引入数据驱动的方法,特别是利用已知信息的技术,本发明可以有效处理机器人操纵臂运动学上的不准确和偏差,以提高在实际生产过程中的性能和可靠性。本发明通过将关节角漂移与末端执行器位置偏差解耦,有效纠正了关节漂移现象,提高了控制精度和鲁棒性,从而改善机器人在重复任务中的表现。本发明提高了机器人操纵臂在复杂环境中执行任务的性能、鲁棒性和可靠性,使其更适用于广泛的应用领域,包括但不限于工业、航空航天、军事和医疗。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199348.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表