驾驶系统及其操作方法与流程
- 国知局
- 2024-07-31 23:56:55
本公开涉及驾驶系统。
背景技术:
1、随着机器人技术的进步,基于自主驾驶的运送正在进行中。自主驾驶机器人用于各种目的。自主驾驶机器人可以处理在其路径线路内的各种对象(诸如基板、探针卡等)。通常,自主驾驶机器人仅限于装载和运送对象的任务,而在对象的有效处理及其操作方面,技术发展不充分。结果,存在处理对象的主机器人和辅助处理对象的子机器人的综合操作不容易的缺点。
技术实现思路
1、本公开的方面旨在综合地操作多个机器人,以确保在驾驶装置从起始点到目的地的驾驶期间准确且安全地获取和装载目标对象。
2、本公开的方面还旨在防止可能由对相对较重载荷的目标对象的手动处理而引起的诸如人身伤害和产品损坏的潜在事故。
3、本公开的方面还旨在防止由于对目标对象的重复的手动处理而导致的工作负荷的累积以及可操作性的降低。
4、本公开的方面还旨在与目标对象的获取和装载有关地执行主动管理和事后管理,以确保目标对象适当地定位在预定范围内。
5、本公开的方面还旨在通过主动管理和事后管理来防止可能由于目标对象偏离其预定位置而引起的功能测试和后续工艺中的异常。
6、然而,本公开的方面不限于本文中所阐述的内容。通过参考以下给出的本公开的详细描述,本公开的以上和其他方面对于本公开所属领域的普通技术人员将变得更加明显。
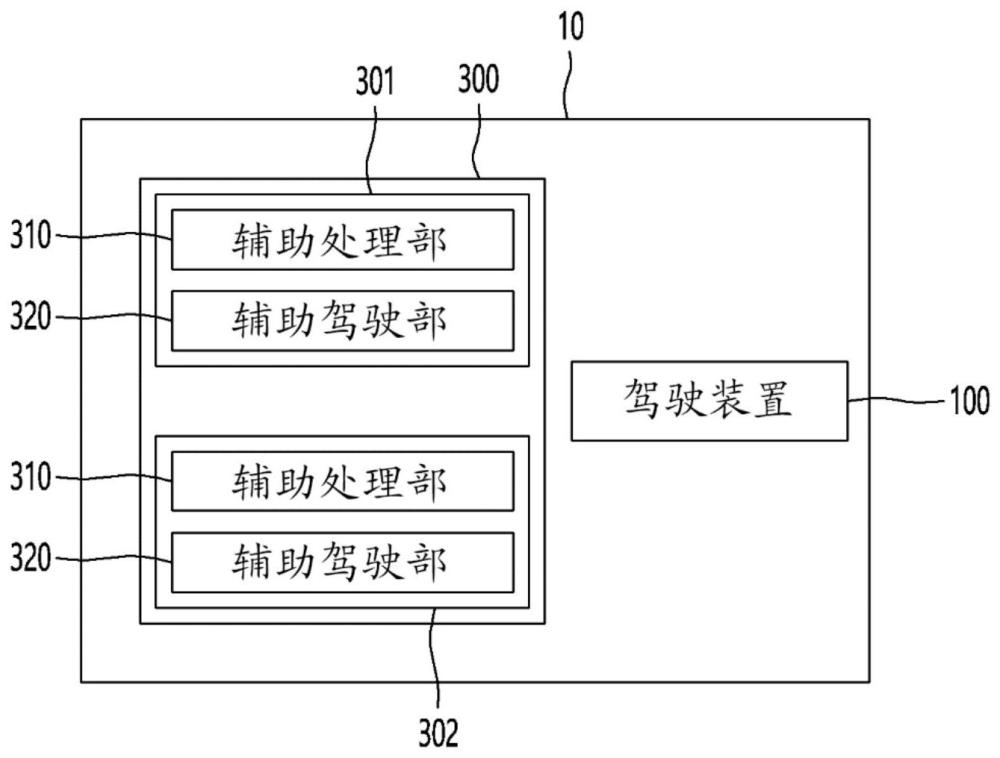
7、根据本公开的一方面,驾驶系统包括:驾驶装置,执行用于处理目标对象的处理操作;以及辅助驾驶装置,执行用于辅助驾驶装置的处理操作的辅助处理操作,其中,驾驶装置和辅助驾驶装置使用无线通信方法来互连,从而为了目标对象的运送和装载而操作。
8、根据本公开的另一方面,驾驶系统包括:驾驶装置,执行用于处理目标对象的处理操作;以及辅助驾驶装置,执行用于辅助驾驶装置的处理操作的辅助处理操作,其中,驾驶装置和辅助驾驶装置使用无线通信方法来互连,从而为了目标对象的运送和装载而操作,辅助驾驶装置包括与驾驶装置互锁的第一辅助驾驶装置和第二辅助驾驶装置,第一辅助驾驶装置和第二辅助驾驶装置依次与驾驶装置互锁,从而实现处理操作,驾驶装置执行收集目的地处的任何替换目标对象的第一收集操作以及将通过第一收集操作收集的替换目标对象装载在第一辅助驾驶装置中的第一装载操作,当目标对象定位在第二辅助驾驶装置中时,驾驶装置执行从第二辅助驾驶装置拾取和收集目标对象的第二收集操作以及将通过第二收集操作收集的目标对象装载在目的地处的第二装载操作,驾驶装置包括:驾驶部,使用自主驾驶方法沿着清洁室内的驾驶路径驾驶;以及处理部,设置在驾驶部中,并且通过在多个轴向方向上移动来执行针对目标对象的三维(3d)处理操作。
9、根据本公开的另一方面,驾驶系统的操作方法包括:通过使驾驶装置和辅助驾驶装置能够彼此互锁来处理目标对象,其中,驾驶装置执行用于处理目标对象的处理操作,辅助驾驶装置执行用于辅助驾驶装置的处理操作的辅助处理操作,以及驾驶装置和辅助驾驶装置使用无线通信方法来互连,从而为了目标对象的运送和装载而操作。
10、根据本公开的上述和其他实施方式,可以综合地操作多个机器人,以确保在驾驶装置从起始点到目的地的驾驶期间准确且安全地获取和装载目标对象。
11、此外,可以防止可能由对相对较重载荷的目标对象的手动处理而引起的诸如人身伤害和产品损坏的潜在事故。
12、此外,可以防止由于对目标对象的重复的手动处理而导致的工作负荷的累积以及可操作性的降低。
13、此外,可以与目标对象的获取和装载有关地执行主动管理和事后管理,以确保目标对象适当地定位在预定范围内。
14、此外,可以通过主动管理和事后管理来防止可能由于目标对象偏离其预定位置而引起的功能测试和后续工艺中的异常。
15、应当注意,本公开的效果不限于以上描述的内容,并且本公开的其他效果将从以下描述中变得明显。
技术特征:1.一种驾驶系统,包括:
2.根据权利要求1所述的驾驶系统,其中,
3.根据权利要求2所述的驾驶系统,其中,所述驾驶装置执行收集目的地处的任何替换目标对象的第一收集操作以及将通过所述第一收集操作收集的所述替换目标对象装载在所述第一辅助驾驶装置中的第一装载操作。
4.根据权利要求3所述的驾驶系统,其中,
5.根据权利要求4所述的驾驶系统,其中,
6.根据权利要求5所述的驾驶系统,其中,所述辅助驾驶装置执行第一中继操作,在所述第一中继操作中,在所述第一辅助驾驶装置为了所述第一装载操作而启程前往第一位置之后,所述第二辅助驾驶装置为了所述第二收集操作而代替所述第一辅助驾驶装置启程前往所述第一位置。
7.根据权利要求5所述的驾驶系统,其中,所述辅助驾驶装置执行第二中继操作,在所述第二中继操作中,所述第一辅助驾驶装置为了所述第一装载操作而启程前往第一位置,并且所述第二辅助驾驶装置为了所述第二收集操作而启程前往不同于所述第一位置的第二位置。
8.根据权利要求5所述的驾驶系统,其中,所述辅助驾驶装置包括:
9.根据权利要求1所述的驾驶系统,其中,所述驾驶装置包括:
10.根据权利要求9所述的驾驶系统,其中,所述处理部包括:
11.根据权利要求10所述的驾驶系统,其中,所述拾取单元包括:
12.根据权利要求11所述的驾驶系统,其中,
13.根据权利要求11所述的驾驶系统,其中,
14.根据权利要求13所述的驾驶系统,其中,
15.根据权利要求11所述的驾驶系统,其中,所述目标对象在与起始位置对应的第一位置、与所述第一安装单元对应的第二位置以及与目的地处的第二安装单元对应的第三位置之间移动。
16.根据权利要求15所述的驾驶系统,其中,所述拾取单元还包括:
17.根据权利要求16所述的驾驶系统,其中,
18.根据权利要求17所述的驾驶系统,其中,
19.一种驾驶系统,包括:
20.一种驾驶系统的操作方法,包括:
技术总结本公开提供了一种驾驶系统。驾驶系统包括:驾驶装置,执行用于处理目标对象的处理操作;以及辅助驾驶装置,执行用于辅助驾驶装置的处理操作的辅助处理操作,其中,驾驶装置和辅助驾驶装置使用无线通信方法来互连,从而为了目标对象的运送和装载而操作。技术研发人员:李承赞,李昊嵘,孙旺贤,权祐相,金瑄旿受保护的技术使用者:细美事有限公司技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240730/199337.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。