一种组合动力飞行器模态转换段切换控制方法
- 国知局
- 2024-07-31 23:57:57
本发明属于组合动力飞行器切换控制领域,具体涉及一种组合动力飞行器模态转换段切换控制方法。
背景技术:
1、组合动力飞行器是一种具有多种动力源的飞行器,例如涡轮发动机和冲压发动机的组合。在飞行过程中,根据不同的飞行阶段和要求,需要进行动力模态的切换,以实现最佳的性能和效率。
2、然而,由于涡轮基组合循环发动机(tbcc,turbine-based combined cycle)的模态转换点通常处于涡轮发动机工作马赫数的上限和冲压发动机工作马赫数的下限,在模态转换过程中,容易出现推阻不平衡的情况,导致飞机持续减速,难以为冲压发动机的正常启动提供合适的流动条件。这种由于推阻不平衡导致飞机无法完成从低速到高速、从涡轮发动机到冲压发动机过渡的现象被称为“推力陷阱”问题。因此,针对组合发动机模态转换段开展切换控制技术研究具有重要的现实意义;
3、另外,针对组合动力飞行器正常飞行阶段飞行需求,基于超螺旋滑模技术设计控制律实现闭环轨迹跟踪。考虑在组合动力飞行器模态转换段针对“推力陷阱”问题设计输入约束控制律,若直接采用硬切换策略,即在组合动力飞行器模态转换段进行模态切换时,突然改变系统参数或模态权重,可能会导致飞行器的工况突变和不稳定性,对飞行安全和性能产生负面影响。
技术实现思路
1、本发明的目的是提供一种组合动力飞行器模态转换段切换控制方法,能够解决“推力陷阱”问题并提出控制器切换策略,以确保组合动力飞行器在模态转换段的飞行质量和鲁棒性能。
2、本发明采取的技术方案具体如下:
3、一种组合动力飞行器模态转换段切换控制方法,包括以下步骤:
4、步骤一:在正常飞行段,采用超螺旋滑模控制方案来实现鲁棒控制,推力作为控制量,与攻角、倾侧角一起作为位置环闭环控制系统的控制输入;并且基于二阶超螺旋滑模方法设计位置环控制器;
5、超螺旋滑模控制算法,包括如下步骤:a1模型线性化处理;a2误差系统建立;a3正常飞行段控制律设计;
6、步骤二:在模态转换段,基于超螺旋滑模方法设计输入约束控制器;
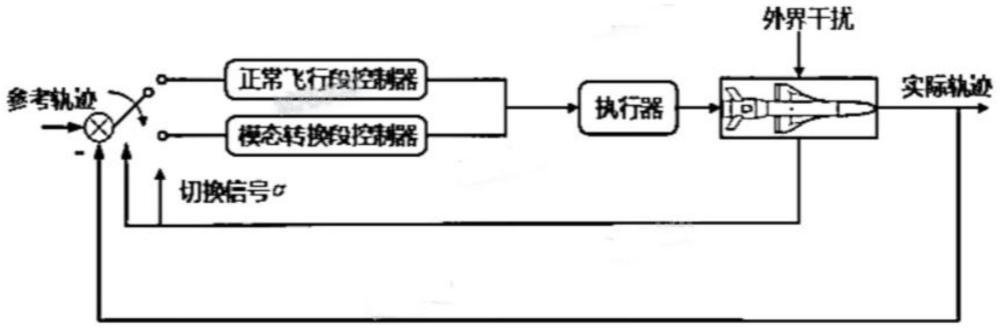
7、步骤三:在不同工作模态之间切换时,采用了幂次函数型软切换策略,软切换策略通过逐步调整控制参数和控制逻辑,来实现平滑过渡和动力切换;
8、步骤四:组合动力飞行器切换控制算法性能验证,首先给出仿真环境与参数,然后分别在无扰环境和噪声环境中验证正常飞行段控制算法的有限时间收敛性能,并验证模态转换段控制算法的有限时间收敛和输入约束性能。
9、进一步的,所说步骤一中,a1模型线性化处理
10、假设组合发动机飞行器为刚体模型,忽略地球自转带来的影响,则飞行器六自由度质心动力学模型可以描述为:
11、
12、式中,h,θ,φ,v,γ,χ分别为海拔高度、经度、纬度、速度、航迹角和航向角;l,d,t分别为升力、阻力和推力;α,σ为攻角和倾侧角;m为飞行器质量;g为重力加速度,g=μg/h2,其中μg为引力参数;
13、此外,升、阻力可以表示为
14、
15、式中,ma为马赫数s为飞行器气动参考面积,qd为动压,qd=0.5ρv2;ρ为大气密度,其中ρ0为海平面处的大气密度,re为地球半径,β为常值系数;
16、取飞行器状态量为x=[h,v,γ]t,控制量为u=[α,σ,t]t,从而得到方形控制系统;进一步,为得到仿射形式的飞行器系统输入输出方程,在输入通道引入积分器,将系统转换为增广仿射非线性系统:
17、
18、式中,x′=[h,v,γ,α,σ,t]t为新的状态量,为新的控制量,状态矩阵f(x′)和控制矩阵g分别为:
19、
20、
21、从式(5)中可以看出控制矩阵g是与状态量x′无关的一个常数矩阵,从而将u′从x′中完成了解耦;
22、然后对系统输出进行输入输出线性化:
23、
24、式中,f=f(x′)和g为式(3)中定义的光滑向量场,表示标量函数ξ相对于向量场f的李导数,和表示多重李导数;
25、进一步的,所说步骤一中,a2误差系统建立
26、对系统进行输入输出线性化,得到仿射形式的系统误差动态方程如下:
27、
28、式中,其中eh=h-href表示高度跟踪误差,ev=v-vref表示速度跟踪误差,eγ=γ-γref表示航迹角跟踪误差,表示对应的参考轨迹导数,a1,a2,a3,b1,b2,b3表示系数矩阵,具体定义如下:
29、
30、
31、考虑控制通道扰动,误差动态方程有如下形式:
32、
33、
34、
35、进一步的,所说步骤一中,a3正常飞行段控制律设计
36、针对组合动力飞行器轨迹跟踪系统(10),针对高度环子系统建立滑动变量如下:
37、
38、式中符号「·」=||·||sign(·),参数λhi,ρhi(i=1,2,3)为待设计的正常数;
39、接下来,针对组合动力飞行器位置环高度环子系统(10)(13),基于超螺旋滑模算法的有限时间控制器设计为如下形式,则系统(10)是有限时间稳定的,跟踪误差有限时间收敛到零;
40、
41、式中fh表示式(10)中的标称项,参数λhi(i=1,2,3)的设置满足多项式sn+λnsn-1+…+λ2s+λ1是hurwitz的,ρhi(i=1,2,3)的设置满足且ρn=ρ,ρn+1=1;而其他参数满足下述条件:
42、
43、进一步的,所述步骤二中输入约束控制器(17)设计,针对组合动力飞行器轨迹跟踪系统(10)针对高度环子系统建立滑动变量如下:
44、
45、式中òh1为任意正常数,参数λhi,ρhi(i=1,2,3)为待设计的正常数;
46、接下来,针对组合动力飞行器位置环高度环子系统(10)和(16),具备输入约束的控制器设计为如下形式,则系统(10)是有限时间稳定的,轨迹跟踪误差在控制输入满足约束条件的前提下有限时间收敛到零;
47、
48、
49、式中fh表示式(10)中的标称项,参数òh1为任意正常数,λhi(i=1,2,3)的设置满足多项式sn+λnsn-1+…+λ2s+λ1是hurwitz的,ρhi(i=1,2,3)的设置满足且ρn=ρ,ρn+1=1;而其他参数满足下述条件:
50、
51、
52、式中uhint的初始值满足
53、进一步的,所述步骤三中,不同工作区间切换时采用软切换策略实现平滑过渡和动力切换,组合动力飞行器轨迹跟踪模型(10)~(12)描述为如下非线性切换系统:
54、
55、
56、
57、式中函数σ(t):m={1,2,3}为切换信号,且σ(t)=j时表示第j个子系统是激活的;
58、假设组合动力飞行器模态切换的过渡时间为ttran:[tj0,tj1],j=1,2,其中tj0和tj1分别表示过渡过程起止时间,j代表不同工作模态间的切换信号。
59、进一步的,所述步骤三中,针对组合动力飞行器位置环高度环子系统(10),采用正常飞行段超螺旋滑模控制器(14)和模态转换段输入约束控制器(17),基于幂次函数的软切换控制器设计为如下形式,则系统(10)在过渡过程满足平均驻留时间τa>lnμ/c1的任意切换下是稳定的;
60、uh,tran=(1-μ)uh,j0+μuh,j1
61、
62、式中uh,j0和uh,j1分别表示切换前后的控制量,c1为时间常数;
63、综上所述,组合动力飞行器过渡过程软切换控制器统一为如下形式:
64、utran=(1-μ)u-+μu+
65、式中utran表示过渡过程控制律,u-=[uh-,uv-,uγ-]t和u+=[uh+,uv+,uγ+]t分别表示切换前后的控制量;
66、综合前两步内容及式(22),组合动力飞行器爬升过程的切换控制策略可以描述为:v2,σ(t)
67、
68、式中表示组合发动机爬升段的总体控制器,δ代表切换信号,δ=1时对应正常飞行段控制律,δ=0时对应模态转换段控制律;高度环控制器在正常飞行阶段采用如下(14)形式;
69、正常飞行阶段速度环和航迹角环控制器设计有如下形式:
70、
71、
72、
73、
74、式中fv,fγ表示式(11)~(12)中的标称项,参数λvi,ρvi,λγi,ργi(i=1,2)和增益设置参考高度环;
75、模态转换阶段速度环和航迹角环控制器设计有如下形式:
76、
77、
78、
79、
80、
81、
82、式中fv,fγ表示式(11)~(12)中的标称项,参数πvi,πγi(i=1,2)为任意正常数,参数λvi,ρvi,λγi,ργi(i=1,2)和增益设置参考高度环。
83、进一步的,所述步骤四中,基于matlab 2022a/simulink环境对算法性能进行仿真验证,采样时间为1ms;pc机配置为core i7-8700,主频3ghz,16gb内存。
84、本发明取得的技术效果为:
85、本发明提出的组合动力飞行器模态转换段切换控制方案,在正常飞行段采用超螺旋滑模控制技术,使控制器具备了更强的鲁棒性能。同时,在模态转换段采用输入约束控制技术,从根源上解决了可能出现的“推力陷阱”问题。此外,采用软切换技术,实现不同工作模态间的平滑过渡和推力交接,具有很高的实际应用价值。
86、对比传统的组合动力飞行器飞行控制方案,本发明的优势如下:
87、(1)解决“推力陷阱”问题:通过引入输入约束控制技术,本发明从根源上解决了可能出现的“推力陷阱”问题。通过限制飞行器的输入量在安全范围内,确保飞行器能够顺利完成模态切换过程,避免由于推力受限而引发的不稳定问题。
88、(2)平滑过渡和推力交接:幂次函数型软切换技术实现了不同工作模态之间的平滑过渡和推力交接。该技术通过渐进地调整控制参数和逻辑,确保飞行器保持稳定和可控,避免在切换过程中出现不稳定行为和性能下降的情况,相比于传统指数切换策略具备更好性能,且不依赖于惯性系数的选取。通过逐步调整,控制系统能够适应新的工作模态,使飞行器能够平稳过渡,顺利完成推力交接。
89、综上所述,本发明可以在组合动力飞行器领域带来相应的效益。“推力陷阱”一直以来都是组合动力飞行器和组合发动机领域研究的重点问题,本发明设计的组合动力飞行器模态转换段切换控制方案具有鲁棒性好、工程实用性强等特点,有很高的应用价值,为将来组合动力飞行器技术发展提供了一种创新的控制方案。此外,本发明还为组合动力飞行器技术的未来发展提供了更多可能性。通过进一步研究和改进,可以将该方案与模糊控制、强化学习等先进的控制算法和技术相结合,进一步提升飞行器的性能和自主决策能力,具有相当高的现实意义。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199418.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。