一种操舵仪航迹偏差计算方法与流程
- 国知局
- 2024-11-19 09:46:30
本发明涉及船舶仪器设备,尤其涉及一种操舵仪航迹偏差计算方法。
背景技术:
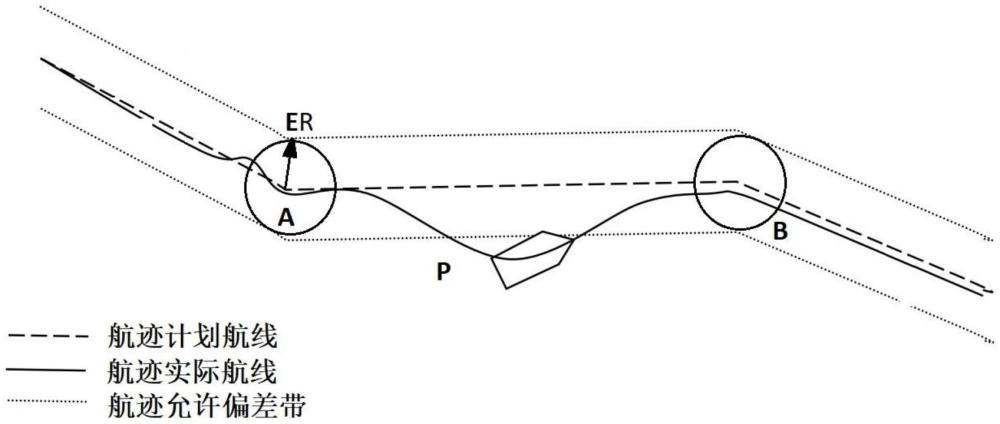
1、航迹控制系统是实现船舶航行过程中的航向保持和航迹跟踪,控制船舶沿着计划航线航行的自动操舵系统。
2、快速准确的计算出船舶的航迹偏差,一旦发现船舶越出偏差带,立即采用航迹控制方式,使船舶迅速返回计划航线,极大提高了船舶的航行安全。
技术实现思路
1、有鉴于此,本发明提供了一种操舵仪航迹偏差计算方法,用以解决上述背景技术中存在的问题。
2、一种操舵仪航迹偏差计算方法,具体包括以下步骤:
3、s1,获取船舶当前位置的经纬度信息;
4、获取计划航线上起点和终点的经纬度信息;
5、s2,根据计划航线上起点和终点的经纬度信息计算出计划航线航向角θ1,根据船舶当前位置的经纬度信息和计划航线起点的经纬度信息计算出恒向线航向角θ1-θ;
6、s3,根据计划航线航向角θ1和恒向线航向角θ1-θ计算得到航向角偏差θ,进而求得航迹偏差d,将航迹偏差d与航迹允许偏差值er进行比较以判断船舶是否偏离航迹,若偏离,则根据偏离距离调整航迹,若不偏离,则按原计划航线继续进行直线航行。
7、优选地,还包括步骤s4,当船舶即将驶离当前计划航线,并驶向转向点以转向进入下一计划航线时,实时计算船舶当前位置与转向点之间的实际距离,当该距离与动舵起转距离相等时,控制船舶立即开始转向,在转弯阶段实时计算船舶的航迹偏差d’,根据航迹偏差d’调整航迹以使船舶沿着以转弯圆心o、转弯半径r的转弯圆弧航行。
8、优选地,所述动舵起转距离的计算过程为:
9、根据船舶的当前航速计算得到动舵点b;
10、假设船舶在直航前进时从b点开始打舵δ0(右舵),那么由于惯性,船舶以原航速v仍沿原直线行进的滞距
11、
12、假设船舶驶过滞距后立即进入正常旋回,忽略船舶改向中的航速变化,则:
13、根据当前航速v和设定的回转速率r,计算出回转半径
14、计算相邻计划航线之间的航向角差φ=θ2-θ1;
15、计算理论起转点c与计划航线终点d之间的理论起转距离
16、
17、根据滞距和理论起转距离计算得到动舵起转距离
18、
19、其中,t为nomoto船舶运动模型中的时间常数;t1为从0到δ0的动舵时间,如果把舵角的运动按匀速率处理,取由左35°到右30°的时间为28s,则θ1为船舶当前所在计划航线的航向角,θ2为下一计划航线的航向角。
20、优选地,在转弯阶段实时计算船舶的航迹偏差d’的具体步骤为:
21、根据相邻计划航线之间的航向角差以及船舶当前所在计划航线的航向角θ1,可以计算得到转弯圆心o到航路点d的矢量方向与正北的夹角θ3,
22、
23、根据相邻计划航线之间的航向角差以及回转半径r计算出航路点d到转弯圆心o的距离ddo,
24、
25、根据航路点d的经纬度信息转化为墨卡托投影坐标系中的坐标(x2,y2),转弯圆心o到航路点d的矢量方向θ3和航路点d到转弯圆心o的距离ddo,计算出圆心o的坐标(x0,y0),
26、
27、利用船舶实际位置与转弯圆心的距离dso与转弯半径r计算转弯阶段的航迹偏差
28、
29、其中(xs,ys)为船舶当前位置的经纬度转化为墨卡托投影坐标系中的坐标。
30、优选地,步骤s1中船舶当前位置的经纬度信息通过gps卫星导航系统或综合导航系统获取得到;
31、计划航线上起点和终点的经纬度信息通过电子海图获取得到。
32、优选地,步骤s2中,所述直线航行时计划航线航向角θ1的计算过程为:
33、根据计划航线起点和终点的纬度,计算两点的纬度差分纬度渐长率mpa、mpb以及两点之间的纬度渐长率差dmp1;
34、根据计划航线起点和终点的经度,计算两点之间的经度差分dλ1;
35、根据计划航线起点和终点的的纬度渐长率差dmp1和经度差分dλ1计算计划航线航向角θ1,
36、
37、优选地,步骤s2中,所述恒向线航向角θ1-θ的计算过程为:
38、根据船舶当前位置的纬度和计划航线起点的纬度,计算两点之间的纬度差分纬度渐长率mpa、mpp以及两点之间的纬度渐长率差dmp2;
39、根据船舶当前位置的纬度和计划航线起点的经度,计算两点之间的经差分dλ2;
40、根据船舶当前位置和计划航线起点之间的纬度渐长率差dmp2和经差分dλ2计算恒向线航向角θ1-θ,
41、
42、优选地,步骤s3中,根据计划航线航向角θ1和恒向线航向角θ1-θ计算得到航迹偏差d的具体步骤为:
43、根据计划航线航向角θ1和θ1-θ计算夹角θ;
44、根据恒向线航向角θ1-θ和船舶当前位置与计划航线起点的纬度差分算出船舶当前位置与计划航线起点之间的航程s,
45、根据夹角θ和船舶当前位置与计划航线起点之间的航程s,计算出船舶在当前位置的航迹偏差d,d=s*sinθ。
46、优选地,步骤s3和步骤s4中根据航迹偏差调整航迹的具体步骤为:
47、航迹控制器根据计算出的航迹偏差d计算指令航向,并将指令航向传送给航向控制器;
48、
49、式中:e(t)为实时航迹偏差,h(t)为船舶实时航向,u(t)为输出的指令航向,kp—比例系数,ti—积分时间常数,td—为微分时间常数;
50、航向控制器将罗经采集到的实际航向与接收到的指令航向进行比较偏差,根据航向控制算法得到一个指令舵角,并将指令舵角传动给舵角控制器;
51、舵角控制器将舵角反馈装置采集的实际舵角值与接收到的指令舵角进行比较,驱动控制舵角转动,直至船舶实际舵角与指令舵角相等。
52、本发明的有益效果是:
53、本发明根据船舶的两种航行状态分别计算航迹偏差。当船舶直线航行时,根据计划航线的起点和终点的经纬度信息计算出计划航线的航向角θ1,根据船舶当前位置的经纬度信息和计划航线的起点的经纬度信息计算出恒向线航向角θ1-θ,根据计划航线的航向角θ1和恒向线航向角θ1-θ计算得到航向角偏差θ,进而求得航迹偏差d;当船舶转弯时,ad、df为两条相邻的计划航线,根据a点、d点和f点的经纬度计算得到相邻计划航线航向角差接着求得转弯圆心o点的坐标,再用圆心o的坐标和船舶实际位置即可求取两点间的距离dso,再根据转弯半径计算船舶转弯时的航迹偏差d,航迹偏差d可以判断船舶是否偏离计划航线,从而对船舶航迹进行快速控制,避免船舶驶离计划航线。
技术特征:1.一种操舵仪航迹偏差计算方法,其特征在于,具体包括以下步骤:
2.根据权利要求1所述的操舵仪航迹偏差计算方法,其特征在于,还包括步骤s4,当船舶即将驶离当前计划航线,并驶向转向点以转向进入下一计划航线时,实时计算船舶当前位置与转向点之间的实际距离,当该距离与动舵起转距离相等时,控制船舶立即开始转向,在转弯阶段实时计算船舶的航迹偏差d’,根据航迹偏差d’调整航迹以使船舶沿着以转弯圆心o、转弯半径r的转弯圆弧航行。
3.根据权利要求2所述的操舵仪航迹偏差计算方法,其特征在于,所述动舵起转距离的计算过程为:
4.根据权利要求3所述的操舵仪航迹偏差计算方法,其特征在于,在转弯阶段实时计算船舶的航迹偏差d’的具体步骤为:
5.根据权利要求1所述的操舵仪航迹偏差计算方法,其特征在于,步骤s1中船舶当前位置的经纬度信息通过gps卫星导航系统或综合导航系统获取得到;
6.根据权利要求1所述的操舵仪航迹偏差计算方法,其特征在于,步骤s2中,所述直线航行时计划航线航向角θ1的计算过程为:
7.根据权利要求1所述的操舵仪航迹偏差计算方法,其特征在于,步骤s2中,所述恒向线航向角θ1-θ的计算过程为:
8.根据权利要求7所述的操舵仪航迹偏差计算方法,其特征在于,步骤s3中,根据计划航线航向角p1和恒向线航向角p1-θ计算得到航迹偏差d的具体步骤为:
9.根据权利要求1所述的操舵仪航迹偏差计算方法,其特征在于,步骤s3和步骤s4中根据航迹偏差调整航迹的具体步骤为:
技术总结本发明公开了一种操舵仪航迹偏差计算方法,当船舶直线航行时,根据计划航线的起点和终点的经纬度信息计算出计划航线的航向角θ<subgt;1</subgt;,根据船舶当前位置的经纬度信息和计划航线的起点的经纬度信息计算出恒向线航向角θ<subgt;1</subgt;‑θ,根据计划航线的航向角θ<subgt;1</subgt;和恒向线航向角θ<subgt;1</subgt;‑θ计算得到航迹偏差d;当船舶转弯时,计算相邻计划航线航向角差φ,接着求得转弯圆心O点的坐标,再用圆心O的坐标和船舶实际位置即可求取两点间的距离Dso,再根据转弯半径计算船舶转弯时的航迹偏差d,航迹偏差d可以判断船舶是否偏离计划航线,从而对船舶航迹进行快速控制,避免船舶驶离计划航线。技术研发人员:何国祥,杨子健,沈旻雅,蔡忠仁,陈杰,杨敏华受保护的技术使用者:中船航海科技有限责任公司技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/330172.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表