带时延的无人机编队协同跟踪目标航迹规划方法与流程
- 国知局
- 2024-07-31 23:57:15
本发明属于无人机编队航迹规划领域,特别涉及一种基于lyapunov导航向量场的带时延的无人机编队协同跟踪目标航迹规划方法。
背景技术:
1、航迹规划的目的是控制无人机的位置,一般情况下,对无人机编队协同跟踪目标航迹规划都是通过生成航迹点,再要求无人机编队的实际中心或虚拟中心点通过航迹点的方法。而跟踪动态目标的方法大多将无人机编队拆散均匀分布在目标点附近盘旋轨道上的方式进行盘旋,不能在跟踪的同时保持原有编队队形隐蔽性不足。且无人机编队协同目标跟踪的航迹算法大多未考虑时延对编队的影响。
技术实现思路
1、本发明的目的在于提供了一种无人机编队协同跟踪目标航迹规划的方法,使得无人机编队在跟踪动态的地面目标时不需要不断生成航迹点,根据目标点实时位置与安全跟踪距离就可以对动态目标进行盘旋跟踪。
2、为实现本发明目的,本发明提供了带时延的无人机编队协同跟踪目标航迹规划方法,采取技术方案如下:
3、采用虚拟结构法作为无人机队形控制策略,虚拟中心点做为编队的虚拟长机,控制无人机编队整体的运动,基于建立的无人机横纵向的运动学模型,采用时变时延下的无人机编队控制算法,使用lyapunov导航向量场使无人机群保持编队的同时,将虚拟长机引导收敛于以目标为中心点、对峙半径为r0的极限环上。
4、进一步的,利用横侧向自动驾驶仪和纵向自动驾驶仪将无人机运动解耦之后得到横纵向的运动学模型:
5、
6、
7、
8、
9、
10、
11、式中,为系统的控制输入,分别是自动驾驶仪速度指令、航向角指令和俯仰角指令。τv、τz是与无人机及其飞行状态相关的速度时间常数、航向角时间常数、高度时间常数以及爬升速度的时间常数。vi表示横侧向的飞行速度,ωi表示航向角速度,ψi表示航向角,表示爬升速度,表示爬升加速度,无人机在飞行速度、加速度、航向角、航向角速度、爬升速度和爬升加速度方面都有限制,限制条件如下所示,
12、
13、
14、
15、
16、
17、其中,是横侧向最小和最大的飞行速度,是最小和最大飞行加速度,nmax是最大负载。
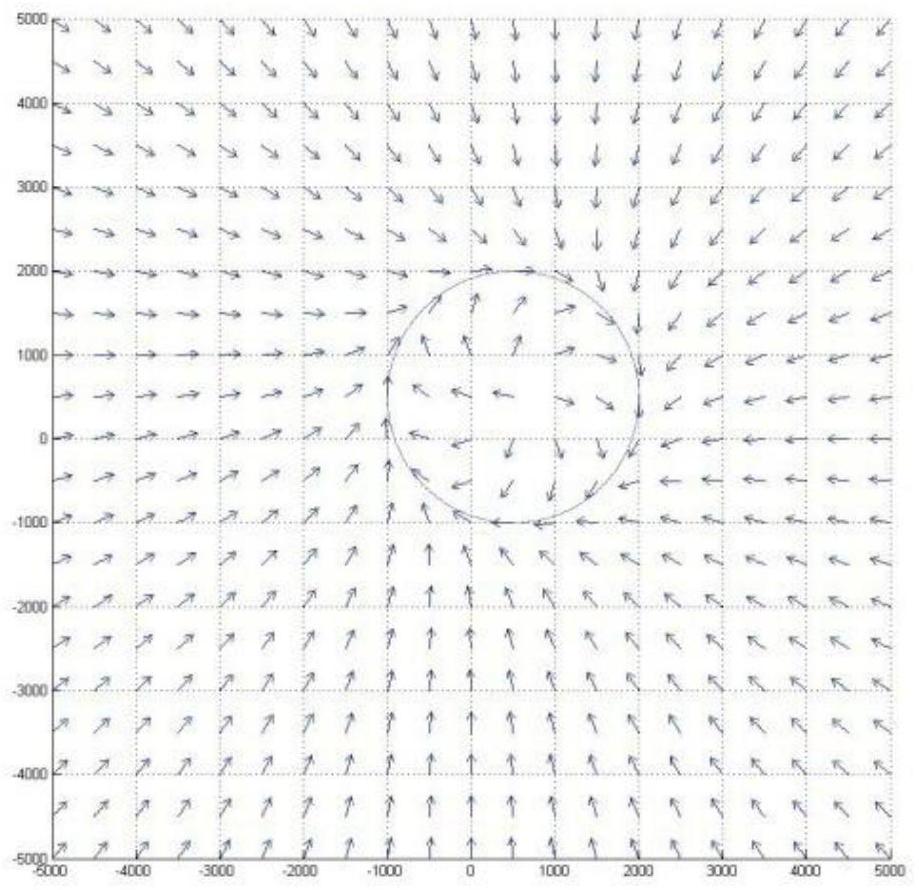
18、进一步的,所述lyapunov导航向量场建立方法如下:
19、通过lyapunov向量场确定虚拟长机的期望速度为确保虚拟长机以速度飞行到以目标(xt,yt)为中心的圆环区域内,采用如下形式的lyapunov函数
20、
21、其中,为虚拟长机到目标之间的距离,r0为对峙距离,x、y为虚拟长机在水平方向上的坐标,且v(x,y)代表导航向量场点(x,y)处的向量场强度,根据向量场强度的梯度,制作lyapunov导航向量场,引导无人机运动。
22、对于运动的目标,假设目标点的运动速度为则虚拟长机的盘旋半径需要
23、
24、进一步的,所述时变时延下的无人机编队控制算法包括水平控制算法与高度控制算法,
25、所述水平控制算法基于邻居无人机的时延信息,并用自己的延时状态与其邻居无人机的延时状态进行比较,得到当前时刻的控制输入,设计每架无人机水平的控制分量;
26、所述高度控制算法是在以虚拟长机做为标定的情况下,用于对无人机编队高度一致性的控制。
27、进一步的,所述水平控制算法如下:
28、无人机i获得邻居无人机的时延信息,并用自己的延时状态与其邻居无人机j的延时状态进行比较,得到当前时刻的控制输入,设计每架无人机水平的控制分量如下式所示,
29、
30、式中,k1、k2表示编队控制增益,xij、yij分别表示两架无人机在地面坐标系下,三个方向上的预定机间距离,xi(t)、yi(t)为t时刻时,无人机i在地面坐标系下的坐标,为t时刻时无人机i在地面坐标系下的坐标变率,和分别表示导航向量场在y方向上对无人机的位置控制增益和速度控制增益,分别表示导航向量场在x方向上对无人机的位置控制增益和速度控制增益,xi,y'i为无人机编队中心在极限环上的投影位置,为导航向量场在x、y方向上的向量分量,τ(t)为在t时刻时无人机i接收其他无人机数据的时延,aij为无人机j相对于该无人机的权值,xi(t-τ(t))、yj(t-τ(t))为(t-τ(t))时刻无人机i的水平上的位置,xj(t-τ(t))、yj(t-τ(t))为(t-τ(t))时刻无人机j的水平方向上的位置。为(t-τ(t))时刻无人机i的水平方向上的速度,为(t-τ(t))时刻无人机j的水平方向上的速度,xi、yi为当前时刻无人机i在水平x,y方向上的的位置。
31、导航向量场为:
32、
33、式中,x、y为无人机虚拟长机点与目标点在水平方向上x轴与y轴的相对位置,则,速度、角度控制指令为:
34、
35、式中为无人机i的航向角,vi为无人机i的速度,为无人机i与无人机j航向角的差值。
36、进一步的,所述高度控制算法如下:
37、在高度控制上,对侦察无人机高度一致性控制策略如下:
38、
39、在以虚拟长机做为标定的情况下,无人机编队的高度控制使用以下控制指令指定侦察无人机编队的高度,
40、
41、式中,zi为无人机i的高度,kz为无人机的纵向速度控制相对高度控制的权重,zij为无人机i与无人机j与虚拟长机在纵轴的距离的期望差值。
42、本发明提供的一种带时延的无人机编队协同跟踪目标航迹规划方法,使用lyapunov导航向量场使无人机编队保持队形的同时自动收敛到期望的轨道上,并未设定航迹点。本发明同时考虑到了时延对编队的影响、保持编队队形和对动态目标的跟踪三点情况。这种方法使得无人机编队在侦察追踪动态地面目标时仅需要得到跟踪目标点位置和安全跟踪距离就可以在保持队形的情况下自动进行无人机编队协同跟踪目标航迹规划。
技术特征:1.带时延的无人机编队协同跟踪目标航迹规划方法,其特征在于,采用虚拟结构法作为无人机队形控制策略,虚拟中心点做为编队的虚拟长机,控制无人机编队整体的运动,基于建立的无人机横纵向的运动学模型,采用时变时延下的无人机编队控制算法,使用lyapunov导航向量场使无人机群保持编队的同时,将虚拟长机引导收敛于以目标为中心点、对峙半径为r0的极限环上。
2.根据权利要求1所述的带时延的无人机编队协同跟踪目标航迹规划方法,其特征在于,利用横侧向自动驾驶仪和纵向自动驾驶仪将无人机运动解耦之后得到横纵向的运动学模型:
3.根据权利要求2所述的带时延的无人机编队协同跟踪目标航迹规划方法,其特征在于,所述lyapunov导航向量场建立方法如下:
4.根据权利要求3所述的带时延的无人机编队协同跟踪目标航迹规划方法,其特征在于,所述时变时延下的无人机编队控制算法包括水平控制算法与高度控制算法,
5.根据权利要求4所述的带时延的无人机编队协同跟踪目标航迹规划方法,其特征在于,所述水平控制算法如下:
6.根据权利要求5所述的带时延的无人机编队协同跟踪目标航迹规划方法,其特征在于,所述高度控制算法如下:
技术总结本发明公开了带时延的无人机编队协同跟踪目标航迹规划方法,采用虚拟结构法作为无人机队形控制策略,虚拟中心点做为编队的虚拟长机,控制无人机编队整体的运动,基于建立的无人机横纵向的运动学模型,采用时变时延下的无人机编队控制算法,使用Lyapunov导航向量场使无人机群保持编队的同时,将虚拟长机引导收敛于以目标为中心点、对峙半径为R<subgt;0</subgt;的极限环上。本发明方法使得无人机编队在侦察追踪动态地面目标时仅需要得到跟踪目标点位置和安全跟踪距离就可以在保持队形的情况下自动进行无人机编队协同跟踪目标航迹规划。技术研发人员:李瑞,安宁,毛飞,谢文球,穆力,曹家华受保护的技术使用者:海鹰航空通用装备有限责任公司技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240730/199368.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。