基于新型冠毛豪猪优化算法的无人机航迹规划方法
- 国知局
- 2024-10-21 15:03:19
本发明涉及无人机控制,特别是涉及一种基于新型冠毛豪猪优化算法的无人机航迹规划方法。
背景技术:
1、无人机具有机动性强、可控性强和灵活性强的优点,被广泛应用于地质勘探、环境监测和电力巡检等工作场景中。在控制无人机进行工作的过程中,需要先根据无人机的飞行任务规划处稳定且安全的飞行航迹,以提高无人机执行任务的时效。因此,如何规划无人机的飞行航迹,尤其是规划在山区等复杂环境中的飞行轨迹,对无人机的飞行控制有着非常重要的现实意义。
2、现有技术中,在规划无人机的飞行航迹的过程中需要使用灰狼算法、鲸鱼法等传统算法,或者蚁群算法、麻雀算法等智能优化算法,其中,智能优化算法因其参数设置简单,计算复杂度低等优点,已广泛应用于航迹规划领域。但是在障碍物数量多、地形复杂的飞行环境中,现有的智能优化算法容易陷入局部最优的计算,无法准确地规划无人机的飞行航迹,更不能保证无人机在复杂中稳定安全快速地抵达指定的目标位置。
技术实现思路
1、本发明的目的在于提供一种基于新型冠毛豪猪优化算法的无人机航迹规划方法,用于解决现有技术中无法准确地规划无人机的飞行航迹的问题,以达到提对无人机控制的安全性和稳定性的目的。
2、具体地,第一方面,本发明提供了一种基于新型冠毛豪猪优化算法的无人机航迹规划方法,所述方法包括:
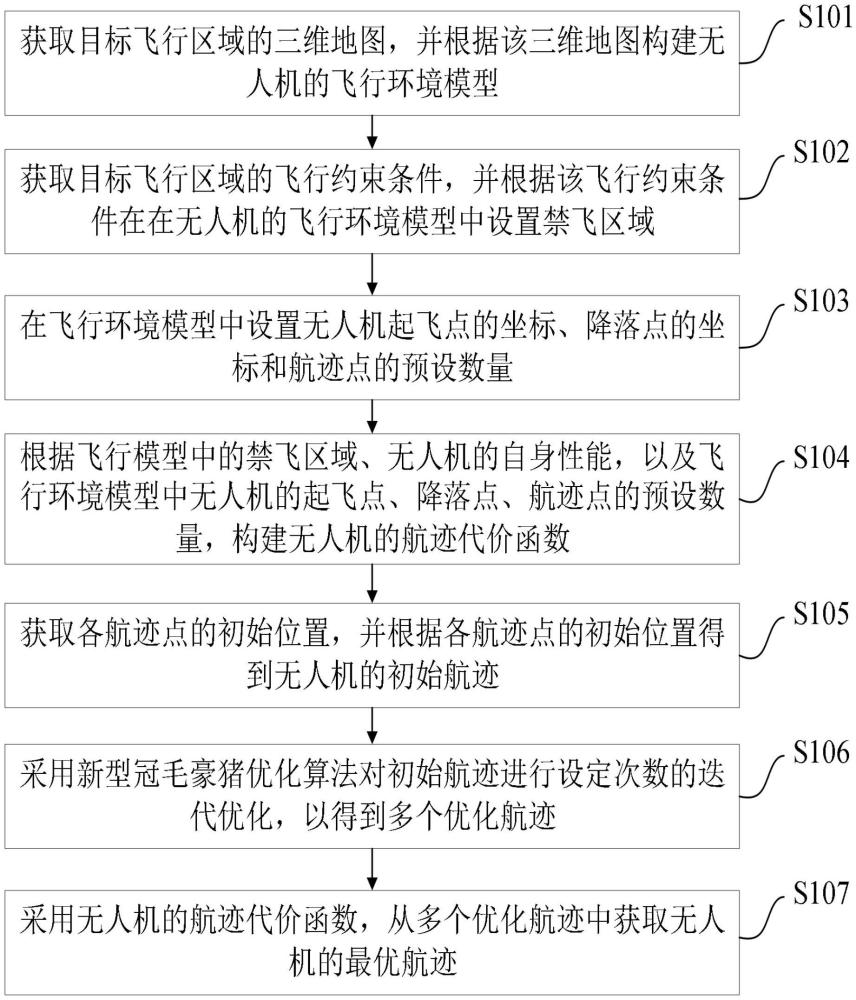
3、获取目标飞行区域的三维地图,根据所述三维地图构建无人机的飞行环境模型;
4、根据所述目标飞行区域的飞行约束条件在所述飞行环境模型中设置禁飞区域,并在所述飞行环境模型中设置所述无人机的起飞点和降落点;
5、获取航迹点的预设数量,并根据所述预设数量、起飞点、降落点、禁飞区域和所述无人机的自身性能,构建所述无人机的航迹代价函数;
6、设置各所述航迹点的初始位置,并根据所述初始位置得到所述无人机的初始航迹;
7、采用新型冠毛豪猪优化算法对所述初始航迹进行设定次数的迭代优化,以得到多个优化航迹;
8、采用所述航迹代价函数从多个所述优化航迹中获取所述无人机的最优航迹。
9、进一步地,所述的采用新型冠毛豪猪优化算法对所述初始航迹进行设定次数的迭代优化,包括:
10、在设定阈值范围内生成第一随机值和第二随机值;
11、在所述第一随机值小于所述第二随机值的情况下,在所述设定阈值范围内生成第三随机值和第四随机值;
12、若所述第三随机值小于所述第四随机值,则采用柯西分布逆积累函数更新冠毛豪猪种群;
13、在所述第一随机值大于所述第二随机值的情况下,在所述设定阈值范围内生成第五随机值,并在所述第五随机值小于设定阈值的情况下,采用高斯随机游走策略更新冠毛豪猪种群。
14、若所述第五随机值大于设定阈值的情况下,采用新型攻击策略更新冠毛豪猪种群。
15、进一步地,所述的设置各所述航迹点的初始位置,包括:
16、获取冠毛豪猪的种群上限阈值和种群下限阈值;
17、在所述种群上限阈值和所述种群下限阈值之间,随机生成冠毛豪猪种群中冠毛豪猪的初始个体位置;
18、根据各所述初始个体位置确定所述相应航迹点的初始位置。
19、进一步地,所述的根据所述预设数量、起飞点、降落点、禁飞区域和所述无人机的自身性能,构建所述无人机的航迹代价函数,包括:
20、根据各所述航迹点之间的距离,构建所述无人机的飞行路径长度代价函数;
21、根据各所述航迹点与各所述禁飞区域之间的距离,构建所述无人机的禁飞成本代价函数;
22、根据各所述航迹点的高度,构建所述无人机的飞行高度成本代价函数;
23、根据所述无人机的俯仰角和偏转角,构建所述无人机的平滑代价函数;
24、根据所述飞行路径长度代价函数、禁飞成本代价函数、飞行高度成本代价函数和平滑代价函数中的一个或多个,构建所述航迹代价函数。
25、进一步地,所述的根据各所述航迹点之间的距离,构建所述无人机的飞行路径长度代价函数,包括:
26、获取各相邻航迹点之间的欧式距离,并根据各所述欧式距离构建所述飞行路径长度代价函数。
27、进一步地,所述的根据各所述航迹点的高度,构建所述无人机的飞行高度成本代价函数,包括:
28、获取所述航迹点的最大高度阈值和最小高度阈值,并根据所述最大高度阈值和所述最小高度阈值计算所述航迹点的平均高度阈值;
29、根据各所述航迹点的高度与所述平均高度阈值之间的偏差,构建所述高度成本代价函数。
30、进一步地,所述的根据所述飞行路径长度代价函数、禁飞成本代价函数、飞行高度成本代价函数和平滑代价函数中的一个或多个,构建所述航迹代价函数,包括:
31、获取所述飞行路径长度代价函数、禁飞成本代价函数、飞行高度成本代价函数和平滑代价函数的权重系数,其中各所述权重系数之和为设定数值;
32、根据各所述权重系数分别对所述飞行路径长度代价函数、禁飞成本代价函数、飞行高度成本代价函数和平滑代价函数的权重系数进行加权,以得到所述航迹代价函数。
33、进一步地,所述的根据所述目标飞行区域的飞行约束条件在所述飞行环境模型中设置禁飞区域,包括:
34、获取所述目标飞行区域中的雷达区域的位置,并根据所述雷达区域的位置在所述飞行环境模型中建立相应的圆柱体模型,以在所述飞行环境模型中设置所述雷达区域对应的禁飞区域。
35、进一步地,所述的根据所述三维地图构建无人机的飞行环境模型,包括:
36、获取所述目标飞行区域中各障碍物的位置和尺寸,并根据所述各障碍物的位置和尺寸在所述飞行环境模型中建立相应的圆柱体模型,以在所述飞行环境模型中设置各所述障碍物对应的禁飞区域。
37、进一步地,在所述的采用所述航迹代价函数从多个所述优化航迹中获取所述无人机的最优航迹后,还包括:
38、将所述最优航迹导入设定制图软件,以将所述最优航迹绘制成图。
39、本发明所提供的技术方案,采用新型冠毛豪猪优化算法对无人机的初始航迹进行迭代优化以得到多个优化航迹,并根据航迹代价函数从该多个优化航迹中获取无人机的最优航迹。由于新型冠毛豪猪算法的机制简单、收敛性强且容易实现,因此采用新型冠毛豪猪算法对无人机的初始航迹进行迭代优化,可以减少获取无人机最优航迹所需的时间,提高工作效率。并且本发明的技术方案中,根据航迹点的预设数量、起飞点、降落点、禁飞区域和无人机的自身性能构建无人机的航迹代价函数,因此根据该航迹代价函数获取的最优航迹,可以提高飞行稳定性和安全性。
40、根据下文结合附图对本发明具体实施例的详细描述,本领域技术人员将会更加明了本发明的上述以及其他目的、优点和特征。
技术特征:1.一种基于新型冠毛豪猪优化算法的无人机航迹规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的无人机航迹规划方法,其特征在于,
3.根据权利要求1所述的无人机航迹规划方法,其特征在于,
4.根据权利要求1所述的无人机航迹规划方法,其特征在于,
5.根据权利要求4所述的无人机航迹规划方法,其特征在于,
6.根据权利要求4所述的无人机航迹规划方法,其特征在于,
7.根据权利要求4所述的无人机航迹规划方法,其特征在于,
8.根据权利要求1所述的无人机航迹规划方法,其特征在于,
9.根据权利要求1所述的无人机航迹规划方法,其特征在于,
10.根据权利要求1所述的无人机航迹规划方法,其特征在于,
技术总结本发明提供了一种基于新型冠毛豪猪优化算法的无人机航迹规划方法,包括:获取目标飞行区域的三维地图,根据所述三维地图构建无人机的飞行环境模型;根据所述目标飞行区域的飞行约束条件在所述飞行环境模型中设置禁飞区域,并在所述飞行环境模型中设置所述无人机的起飞点和降落点;获取航迹点的预设数量,并根据所述预设数量、起飞点、降落点、禁飞区域和所述无人机的自身性能构建航迹代价函数;获取无人机的初始航迹;采用新型冠状豪猪优化算法对所述初始航迹进行设定次数的迭代优化,以得到多个优化航迹;采用所述航迹代价函数从多个所述优化航迹中获取所述无人机的最优航迹。本发明的技术方案能够提高对无人机控制的安全性和稳定性。技术研发人员:齐仁龙,童世豪,娄泰山,朱小会,张亚超,李大海,马明慧,焦玉召,丁国强,鲁迎波受保护的技术使用者:郑州科技学院技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/320329.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表