固化和自由混合空域下基于无人机动态意图的航迹规划方法
- 国知局
- 2024-08-01 00:05:55
本发明涉及一种固化和自由混合空域环境下基于旋翼无人机动态意图的航迹规划方法,属于空中交通管理、空域规划与管理、无人机航迹规划等。
背景技术:
1、针对无人机航空运输系统中存在的单一无人机执行多任务,无人机执行任务改变等需要在无人机起飞后临时更改目的地的问题,由于设计航迹意图变更,无人机原航迹不再适用于任务继续执行;因此,一种能够及时准确地为变更航迹意图后的无人机确定新目标下的航迹,并且能够与低空空域划设环境,包括结构化航路空域、自由空域、地面障碍物等复杂因素兼容的无人机动态航迹规划方法,是支撑未来大规模无人机群运行所亟需的。因此,本文方法考虑未来固化/自由空域融合空域划设模式下,适用于旋翼无人机动态意图变更的航迹规划技术,以适应无人机日趋多样化、复杂化的空域环境以及空中交通需求。
技术实现思路
1、本发明提供一种固化和自由混合空域环境下基于旋翼无人机动态意图的航迹规划方法,解决了结构化航路/航线空域与自由空域混合环境下考虑旋翼无人机动态航迹意图的航迹规划方法。
2、为解决上述技术问题,本发明所采用的技术方案是:
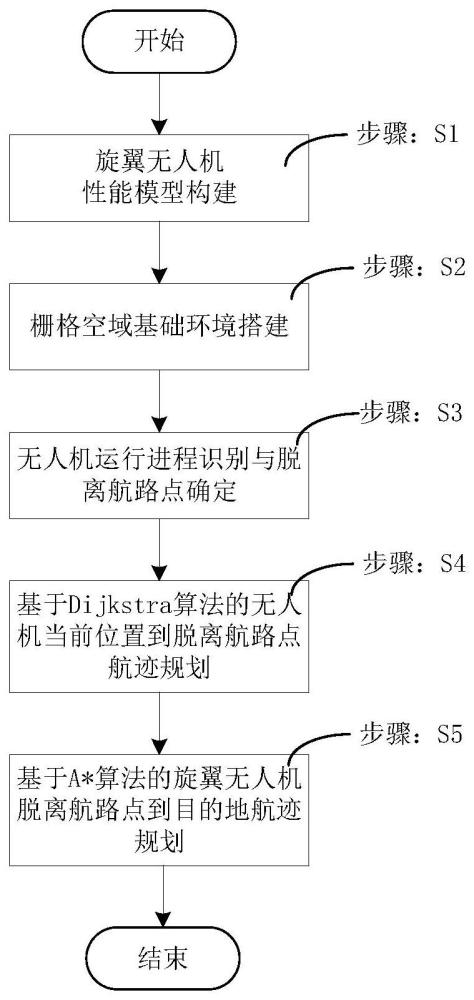
3、一种固化和自由混合空域环境下基于旋翼无人机动态意图的航迹规划方法,其主要步骤包括:
4、步骤一、旋翼无人机性能模型构建
5、基于旋翼无人机控制方式与控制模型,结合特定无人机型号具体性能,确定该型号无人机状态转移方程。
6、步骤二、旋翼无人机栅格空域环境构建
7、步骤2.1空域栅格粒度确定
8、基于步骤一中旋翼无人机基础性能参数,以及无人机状态转移方程,确定无人机单位空域栅格长度、宽度、高度尺寸。
9、步骤2.2空域不可用栅格确定
10、确定基本空域栅格粒度后,进行空域栅格化,然后基于gis地理信息系统以及相关空域规划信息,确定无人机飞行空域存在的建筑障碍物、空域限制区/禁区,标记为空域不可用栅格。
11、步骤三、无人机飞行进程识别与脱离航路点确定
12、步骤3.1无人机飞行进程识别
13、设无人机原始飞行计划中航路点构成有序列表tp,tp=[[x1,y1],[x2,y2],…,[xn,yn]],第i个计划航路点记作tpi=[xi,yi],记无人机当前位置为[x,y],则无人机所属航段tpm-tpn为:
14、
15、步骤3.2无人机飞行意图识别
16、根据当前无人机运行信息,确定无人机所处飞行计划进程,以及下一个目标航路点,分以下情况讨论:
17、情况①:若当前无人机位置满足公式(*),则下一目标航路点next_point为:
18、next_point=tp(i+1)
19、情况②:若当前无人机位置与某计划航路点不满足公式(*),则根据无人机当前位置[x,y]预测下一位置[x’,y’],下一目标航路点next_point为:
20、next_point=argmin{||(x',y'),(xi+1,yi+1)||,||(x',y'),(xi,yi)||}
21、步骤3.3更改航迹意图时无人机脱离航路点确定
22、假设无人机变更航迹意图后最终目的地位置为d,d=[xd,yd],空域中航路点集合为p,p=[p1,p2,…,pn],选择最接近目的地位置d的空域航路点作为脱离航路点p*:
23、p*=argmin{||pk-d||},k∈{1,2,...,n}
24、步骤四、基于dijkstra算法旋翼无人机当前航路点至脱离航路点航迹规划
25、采用dijkstra算法进行旋翼无人机下一目标航路点至脱离航路点航迹规划。
26、步骤五、基于a*算法的旋翼无人机脱离航路点至最终目标位置航迹规划
27、采用a*算法进行旋翼无人机脱离航路点至最终目标位置的航迹规划。
28、本发明的有益效果在于:实现了固化空域下“单无人机多任务”“单无人机飞行任务改变”等场景的旋翼无人机航迹规划,提升低空空中交通规划与管理的灵活性、安全性水平。
技术特征:1.一种固化和自由混合空域下基于无人机动态意图的航迹规划方法,其特征在于,包含以下步骤:
2.根据权利要求1所述的一种固化和自由混合空域下基于无人机动态意图的航迹规划方法,其特征在于,所述步骤一具体为:基于旋翼无人机控制方式与控制模型,结合无人机型号具体受力平衡方程,确定该型号无人机状态转移方程。
3.根据权利要求2所述的一种固化和自由混合空域下基于无人机动态意图的航迹规划方法,其特征在于,
4.根据权利要求3所述的一种固化和自由混合空域下基于无人机动态意图的航迹规划方法,其特征在于:所述步骤二具体为:
5.根据权利要求4所述的一种固化和自由混合空域下基于无人机动态意图的航迹规划方法,其特征在于:旋翼无人机在各个坐标轴分量的额定旋翼转速下标准栅格尺寸为:
6.根据权利要求5所述的一种固化和自由混合空域下基于无人机动态意图的航迹规划方法,其特征在于:所述步骤三具体为:
7.根据权利要求6所述的一种固化和自由混合空域下基于无人机动态意图的航迹规划方法,其特征在于:所述步骤四和五具体为:首先面向固化航路/航线空域采用基于dijkstra算法的旋翼无人机固化空域内最优网络搜索路径规划,然后采用a*算法进行旋翼无人机脱离航路点至最终目的地自由空域环境下航迹规划。
技术总结本发明公开了一种固化/自由混合空域环境下基于旋翼无人机动态意图的航迹规划方法。首先,构建旋翼无人机飞行性能模型,确定其状态转移方程;然后,基于旋翼无人机飞行性能确定空域栅格粒度,结合空域中高层建筑、限制区/禁飞区确定不可用栅格,搭建无人机基础空域飞行环境;进一步设计旋翼无人机运行进程识别,判定旋翼无人机在当前固化航路空域中的运行进程态势以及动态意图下的脱离航路点位置,采用Dijkstra算法进行无人机当前位置到脱离航路点航迹规划;最后,基于A*算法为旋翼无人机搜索脱离航路点后自由空域环境下实现新航迹意图的最优航迹,完成旋翼无人机固化航路与自由空域混合环境下基于其动态意图的航迹规划。该方法旨在实现固化空域下“单无人机多任务”“单无人机飞行任务改变”等场景的旋翼无人机航迹规划,提升低空空中交通规划与管理的灵活性、安全性水平。技术研发人员:薛清文,张洪海,姜雨,钟罡,华明壮受保护的技术使用者:南京航空航天大学技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240730/199653.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。