基于高斯过程回归的航空器航迹跟踪迭代学习控制方法
- 国知局
- 2024-08-01 00:06:31
本发明涉及民航航空器控制,具体涉及一种基于高斯过程回归的航空器航迹跟踪迭代学习控制方法。
背景技术:
1、在民航航空器的飞行过程中,航班起飞具有反复跟踪相同给定轨迹的需求,目标轨迹固定不变,且系统每次运行的条件都相同。对此,迭代学习控制算法通过模仿人类的学习行为,从当前迭代的控制输入和跟踪误差中获取“经验”,并用于指导下一次迭代中的控制律设计。即使一开始的跟踪效果可能不尽人意,但通过重复地学习,最终可以实现对于期望轨迹在全时间段上的良好跟踪效果。由于迭代学习控制存在重复学习过程,其在具有重复运行特性的一类系统,如智能交通网络、电机控制、批次处理系统中有重要的应用。
2、现有的应用于民航航空器起飞的迭代学习控制算法不能完全摆脱对被控对象高精度建模的依赖,特别是优化迭代学习控制。然而在实际情况中,采用传统的辨识方法往往需要耗费大量的计算,且可能有较大的辨识误差进而影响控制任务的开展,限制了迭代学习控制算法尤其是基于优化的迭代学习控制算法的应用。现有的基于优化的迭代学习控制算法,面对系统模型未知的情况,无法直接对迭代学习系统的最优控制律进行求解,换言之现有方法需要将已知的系统模型作为先验信息。然而,由于实际的航空器动力学系统具有高度非线性的特点,常常出现无法建立精确的系统模型的情况。这时,基于优化的迭代学习控制算法就大为受限。
3、综上,现有技术存在需要将原本不易精确建立的航空器动力学模型作为先验信息才能对民航航空器起飞进行迭代学习控制的问题,由于航空器复杂的空气动力学特性,直接通过系统辨识方法建立航空器动力学模型后再据此进行迭代学习控制不仅在技术上存在挑战性,还会带来非常高的计算成本。
技术实现思路
1、鉴于上述问题,本发明提供了一种基于高斯过程回归的航空器航迹跟踪迭代学习控制方法,解决了现有技术中需要将原本不易精确建立的系统模型作为先验信息才能对民航航空器起飞进行迭代学习控制的问题。
2、本发明提供了一种基于高斯过程回归的航空器航迹跟踪迭代学习控制方法,其特征在于,用于在航空器动力学模型信息完全未知的情况下,控制民航航空器爬升阶段的航空器航迹,实现对目标轨迹的跟踪,包括如下步骤:
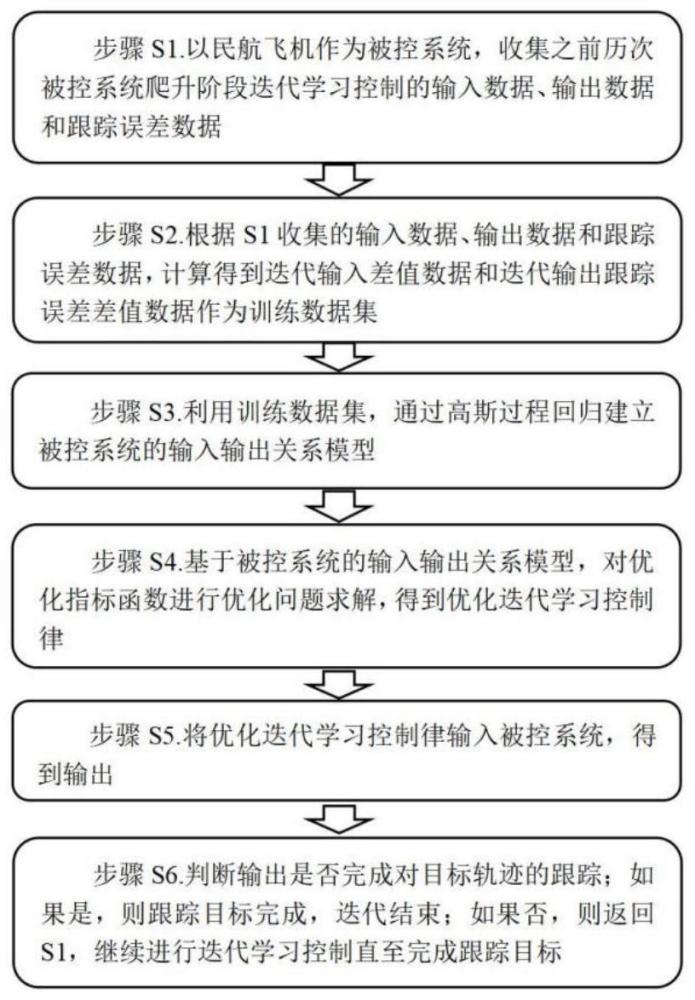
3、s1.以民航航空器作为被控系统,收集之前历次被控系统爬升阶段迭代学习控制的输入数据、输出数据和跟踪误差数据;
4、s2.根据s1收集的输入数据、输出数据和跟踪误差数据,计算得到迭代输入差值数据和迭代输出跟踪误差差值数据作为训练数据集;
5、s3.利用训练数据集,通过高斯过程回归建立被控系统的输入输出关系模型;
6、s4.基于被控系统的输入输出关系模型,对优化指标函数进行优化问题求解,得到优化迭代学习控制律;
7、s5.将优化迭代学习控制律输入被控系统,得到输出;
8、s6.判断输出是否完成对目标轨迹的跟踪;如果是,则跟踪目标完成,迭代结束;如果否,则返回s1,继续进行迭代学习控制直至完成跟踪目标。
9、进一步地,s1,被控系统为离散时间非线性系统,表示为:
10、
11、其中,k=0,1,...为迭代学习次数;uk(t)为被控系统第k次迭代t时刻的输入;yk(t)为被控系统第k次迭代t时刻的输出;xk(t)为被控系统第k次迭代t时刻的系统状态;f(·)和c均蕴含系统模型信息;
12、对被控系统的控制目标为经过迭代学习控制后使有限时间序列上被控系统的输出能够跟踪目标轨迹yd(t),表示为:
13、
14、其中,tr为所跟踪的目标轨迹总时长;
15、则被控系统第k次迭代t时刻的跟踪误差ek(t)表示为:
16、ek(t)=yd(t)-yk(t);
17、之前k次被控系统爬升阶段迭代学习控制的输入数据uk、输出数据yk和跟踪误差数据ek分别表示为:
18、
19、
20、
21、其中,m、n分别表示输入数据uk和输出数据yk的维数。
22、进一步地,s2,迭代输入差值数据构成训练数据集的输入训练集,迭代输出跟踪误差差值数据构成训练数据集的输出训练集;其中,
23、迭代输入差值是每次迭代输入与上一次迭代输入的差值;对于第k+1次和第k次迭代学习控制,其迭代输入差值表示为:
24、δuk=uk+1-uk;
25、迭代输出跟踪误差差值是每次迭代的输出跟踪误差与上一次迭代的输出跟踪误差的差值;对于第k+1次和第k次迭代学习控制,其迭代输出跟踪误差差值表示为:
26、δek=ek+1-ek;
27、将前k次迭代学习控制的迭代输入差值为元素构成迭代输入差值矩阵[δu0 δu1... δuk-1]=tu,以该迭代输入差值矩阵tu作为输入训练集x;
28、将前k次迭代学习控制的迭代输出跟踪误差差值为元素构成迭代输出跟踪误差差值矩阵te=[δe0 δe1 ... δek-1]=tet,以该迭代输出跟踪误差差值矩阵te作为输出训练集y,y=[y1y2...yn],其中yi表示δek第i个元素对应的训练数据。
29、进一步地,s3具体包括:
30、利用输入训练集x和输出训练集y,以待求的δuk作为测试输入进行高斯过程回归,得到对δek的预测数学期望μ和预测方差σ2;由于高斯过程回归只能拟合单输出系统,因此对对每个输出维度δek(i),i=1,2,...,m,分别建立如下高斯过程的模型:
31、δek(i)=fi(δuk)+εε~n(0,σε2);
32、其中,fi(·)为未知的非线性映射;ε为服从高斯分布的均值为0,方差为σε2的噪声;
33、设置测试输入x*=δuk,根据高斯过程回归的计算过程,设置先验分布均值为0,选择核函数其中l为可调整的长度尺度,w,v为训练数据中任意向量;经过高斯过程回归计算,得到被控系统的输入输出关系模型:
34、
35、进一步地,被控系统的输出为n维,n为不小于2的正整数,在s3的高斯过程回归中对测试输出的每一个维度进行一次高斯过程回归,得到μ1…μn和其中,对于第i个维度,按照以下方式获得第i个维度的对δek的预测数学期望μi和预测方差
36、
37、
38、其中,ki矩阵的第h行第j列对应的元素为
39、进一步地,s4,优化指标函数表示为:
40、
41、其中,代表计算数学期望;
42、利用s3中所求的均值和方差完成优化指标函数的计算,在此基础上使用梯度下降法求解优化问题,得到进而得到被控系统的优化迭代学习控制律:
43、uk+1=uk+δuk。
44、与现有技术相比,本发明的基于高斯过程回归的航空器航迹跟踪迭代学习控制方法利用已知的被控系统爬升阶段迭代学习控制的输入数据、输出数据和跟踪误差数据,通过高斯过程回归构建被控系统的输入输出关系模型,能够在航空器动力学模型信息完全未知的情况下实现航空器航迹对目标轨迹的跟踪目标。摆脱了现有技术对航空器动力学模型信息的依赖,可以在有效减少计算和建模成本的同时完成对目标轨迹的跟踪任务。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199708.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表